 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentaur: a foundation model of human cognition
Oct 26, 2024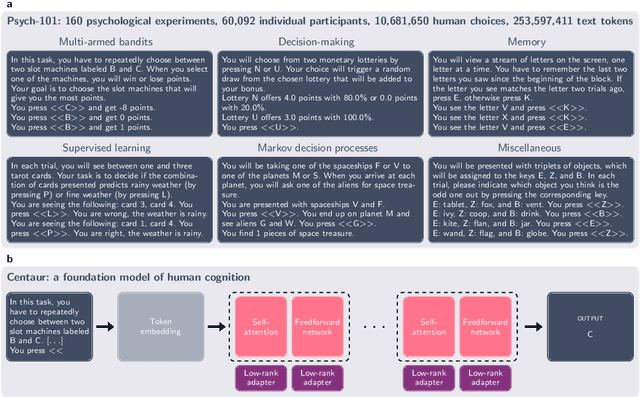
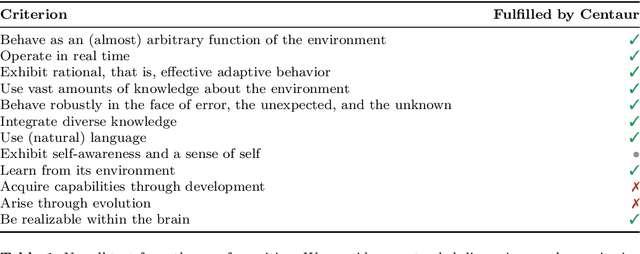
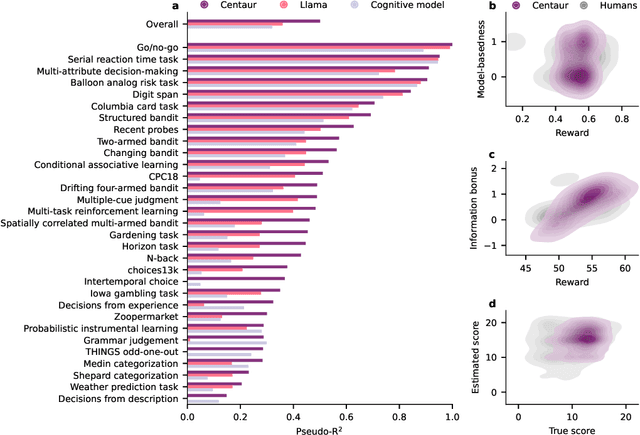
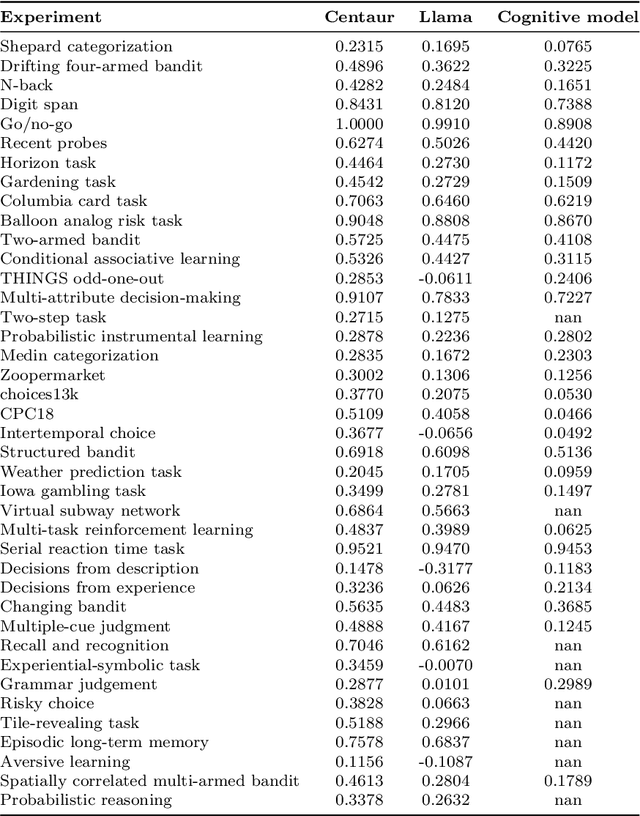
Establishing a unified theory of cognition has been a major goal of psychology. While there have been previous attempts to instantiate such theories by building computational models, we currently do not have one model that captures the human mind in its entirety. Here we introduce Centaur, a computational model that can predict and simulate human behavior in any experiment expressible in natural language. We derived Centaur by finetuning a state-of-the-art language model on a novel, large-scale data set called Psych-101. Psych-101 reaches an unprecedented scale, covering trial-by-trial data from over 60,000 participants performing over 10,000,000 choices in 160 experiments. Centaur not only captures the behavior of held-out participants better than existing cognitive models, but also generalizes to new cover stories, structural task modifications, and entirely new domains. Furthermore, we find that the model's internal representations become more aligned with human neural activity after finetuning. Taken together, Centaur is the first real candidate for a unified model of human cognition. We anticipate that it will have a disruptive impact on the cognitive sciences, challenging the existing paradigm for developing computational models.
Habits of Mind: Reusing Action Sequences for Efficient Planning
Jun 08, 2023



When we exercise sequences of actions, their execution becomes more fluent and precise. Here, we consider the possibility that exercised action sequences can also be used to make planning faster and more accurate by focusing expansion of the search tree on paths that have been frequently used in the past, and by reducing deep planning problems to shallow ones via multi-step jumps in the tree. To capture such sequences, we use a flexible Bayesian action chunking mechanism which finds and exploits statistically reliable structure at different scales. This gives rise to shorter or longer routines that can be embedded into a Monte-Carlo tree search planner. We show the benefits of this scheme using a physical construction task patterned after tangrams.
Reinforcement Learning with Simple Sequence Priors
May 26, 2023
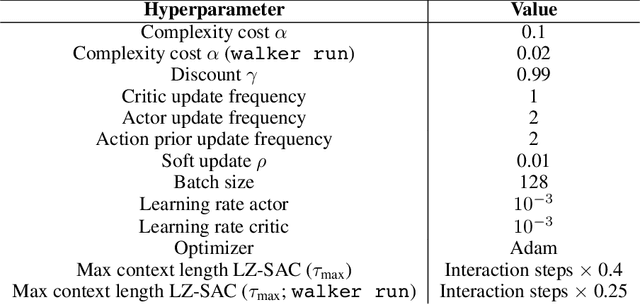


Everything else being equal, simpler models should be preferred over more complex ones. In reinforcement learning (RL), simplicity is typically quantified on an action-by-action basis -- but this timescale ignores temporal regularities, like repetitions, often present in sequential strategies. We therefore propose an RL algorithm that learns to solve tasks with sequences of actions that are compressible. We explore two possible sources of simple action sequences: Sequences that can be learned by autoregressive models, and sequences that are compressible with off-the-shelf data compression algorithms. Distilling these preferences into sequence priors, we derive a novel information-theoretic objective that incentivizes agents to learn policies that maximize rewards while conforming to these priors. We show that the resulting RL algorithm leads to faster learning, and attains higher returns than state-of-the-art model-free approaches in a series of continuous control tasks from the DeepMind Control Suite. These priors also produce a powerful information-regularized agent that is robust to noisy observations and can perform open-loop control.