 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Role of Image Retrieval for Visual Localization -- An exhaustive benchmark
May 31, 2022Visual localization, i.e., camera pose estimation in a known scene, is a core component of technologies such as autonomous driving and augmented reality. State-of-the-art localization approaches often rely on image retrieval techniques for one of two purposes: (1) provide an approximate pose estimate or (2) determine which parts of the scene are potentially visible in a given query image. It is common practice to use state-of-the-art image retrieval algorithms for both of them. These algorithms are often trained for the goal of retrieving the same landmark under a large range of viewpoint changes which often differs from the requirements of visual localization. In order to investigate the consequences for visual localization, this paper focuses on understanding the role of image retrieval for multiple visual localization paradigms. First, we introduce a novel benchmark setup and compare state-of-the-art retrieval representations on multiple datasets using localization performance as metric. Second, we investigate several definitions of "ground truth" for image retrieval. Using these definitions as upper bounds for the visual localization paradigms, we show that there is still sgnificant room for improvement. Third, using these tools and in-depth analysis, we show that retrieval performance on classical landmark retrieval or place recognition tasks correlates only for some but not all paradigms to localization performance. Finally, we analyze the effects of blur and dynamic scenes in the images. We conclude that there is a need for retrieval approaches specifically designed for localization paradigms. Our benchmark and evaluation protocols are available at https://github.com/naver/kapture-localization.
Benchmarking Image Retrieval for Visual Localization
Dec 01, 2020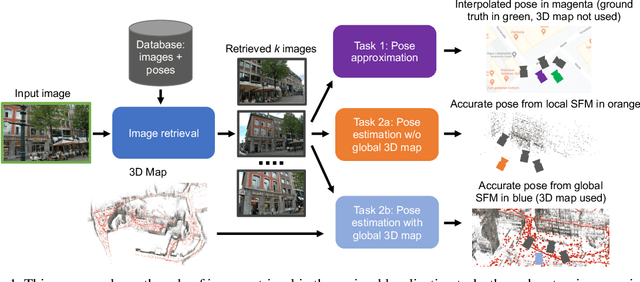

Visual localization, i.e., camera pose estimation in a known scene, is a core component of technologies such as autonomous driving and augmented reality. State-of-the-art localization approaches often rely on image retrieval techniques for one of two tasks: (1) provide an approximate pose estimate or (2) determine which parts of the scene are potentially visible in a given query image. It is common practice to use state-of-the-art image retrieval algorithms for these tasks. These algorithms are often trained for the goal of retrieving the same landmark under a large range of viewpoint changes. However, robustness to viewpoint changes is not necessarily desirable in the context of visual localization. This paper focuses on understanding the role of image retrieval for multiple visual localization tasks. We introduce a benchmark setup and compare state-of-the-art retrieval representations on multiple datasets. We show that retrieval performance on classical landmark retrieval/recognition tasks correlates only for some but not all tasks to localization performance. This indicates a need for retrieval approaches specifically designed for localization tasks. Our benchmark and evaluation protocols are available at https://github.com/naver/kapture-localization.
Robust Image Retrieval-based Visual Localization using Kapture
Aug 31, 2020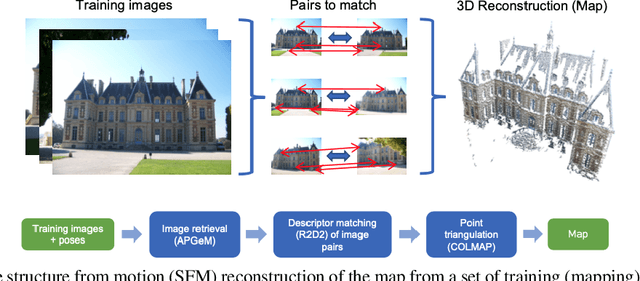
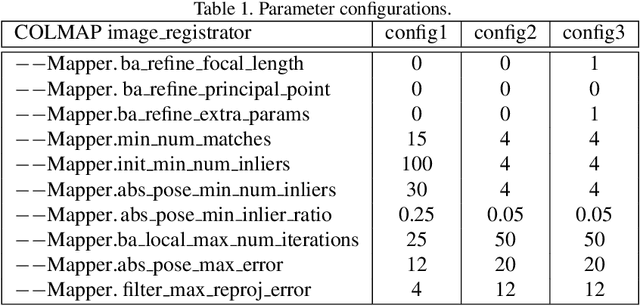
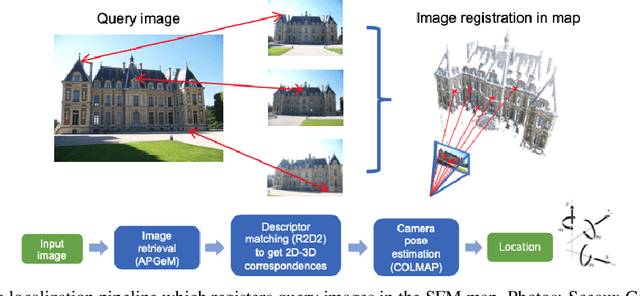

In this paper, we present a versatile method for visual localization. It is based on robust image retrieval for coarse camera pose estimation and robust local features for accurate pose refinement. Our method is top ranked on various public datasets showing its ability of generalization and its great variety of applications. To facilitate experiments, we introduce kapture, a flexible data format and processing pipeline for structure from motion and visual localization that is released open source. We furthermore provide all datasets used in this paper in the kapture format to facilitate research and data processing. Code and datasets can be found at https://github.com/naver/kapture, more information, updates, and news can be found at https://europe.naverlabs.com/research/3d-vision/kapture.