 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Impact of Syntactic and Semantic Proximity on Machine Translation with Back-Translation
Mar 26, 2024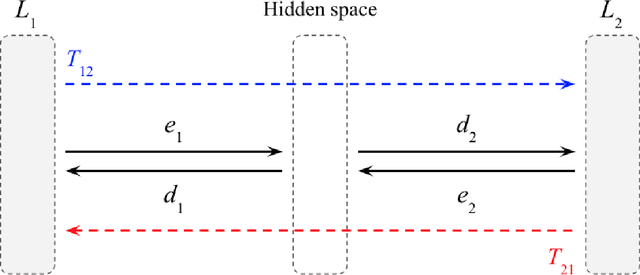
Unsupervised on-the-fly back-translation, in conjunction with multilingual pretraining, is the dominant method for unsupervised neural machine translation. Theoretically, however, the method should not work in general. We therefore conduct controlled experiments with artificial languages to determine what properties of languages make back-translation an effective training method, covering lexical, syntactic, and semantic properties. We find, contrary to popular belief, that (i) parallel word frequency distributions, (ii) partially shared vocabulary, and (iii) similar syntactic structure across languages are not sufficient to explain the success of back-translation. We show however that even crude semantic signal (similar lexical fields across languages) does improve alignment of two languages through back-translation. We conjecture that rich semantic dependencies, parallel across languages, are at the root of the success of unsupervised methods based on back-translation. Overall, the success of unsupervised machine translation was far from being analytically guaranteed. Instead, it is another proof that languages of the world share deep similarities, and we hope to show how to identify which of these similarities can serve the development of unsupervised, cross-linguistic tools.
Robust Image Retrieval-based Visual Localization using Kapture
Aug 31, 2020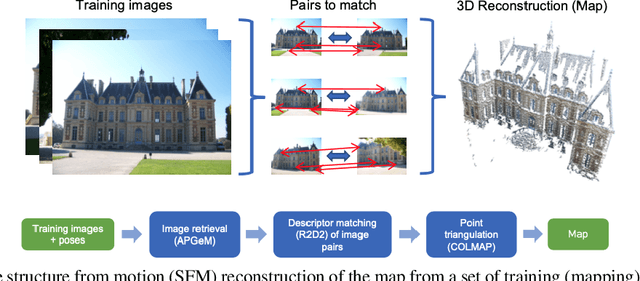
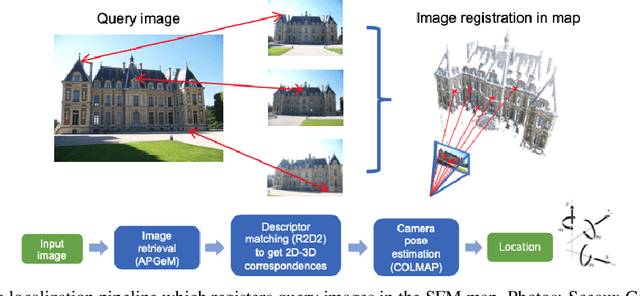

In this paper, we present a versatile method for visual localization. It is based on robust image retrieval for coarse camera pose estimation and robust local features for accurate pose refinement. Our method is top ranked on various public datasets showing its ability of generalization and its great variety of applications. To facilitate experiments, we introduce kapture, a flexible data format and processing pipeline for structure from motion and visual localization that is released open source. We furthermore provide all datasets used in this paper in the kapture format to facilitate research and data processing. Code and datasets can be found at https://github.com/naver/kapture, more information, updates, and news can be found at https://europe.naverlabs.com/research/3d-vision/kapture.