 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatic-Dynamic Class-level Perception Consistency in Video Semantic Segmentation
Dec 11, 2024



Video semantic segmentation(VSS) has been widely employed in lots of fields, such as simultaneous localization and mapping, autonomous driving and surveillance. Its core challenge is how to leverage temporal information to achieve better segmentation. Previous efforts have primarily focused on pixel-level static-dynamic contexts matching, utilizing techniques such as optical flow and attention mechanisms. Instead, this paper rethinks static-dynamic contexts at the class level and proposes a novel static-dynamic class-level perceptual consistency (SD-CPC) framework. In this framework, we propose multivariate class prototype with contrastive learning and a static-dynamic semantic alignment module. The former provides class-level constraints for the model, obtaining personalized inter-class features and diversified intra-class features. The latter first establishes intra-frame spatial multi-scale and multi-level correlations to achieve static semantic alignment. Then, based on cross-frame static perceptual differences, it performs two-stage cross-frame selective aggregation to achieve dynamic semantic alignment. Meanwhile, we propose a window-based attention map calculation method that leverages the sparsity of attention points during cross-frame aggregation to reduce computation cost. Extensive experiments on VSPW and Cityscapes datasets show that the proposed approach outperforms state-of-the-art methods. Our implementation will be open-sourced on GitHub.
Sequential Doppler Shift based Optimal Localization and Synchronization with TOA
Feb 14, 2022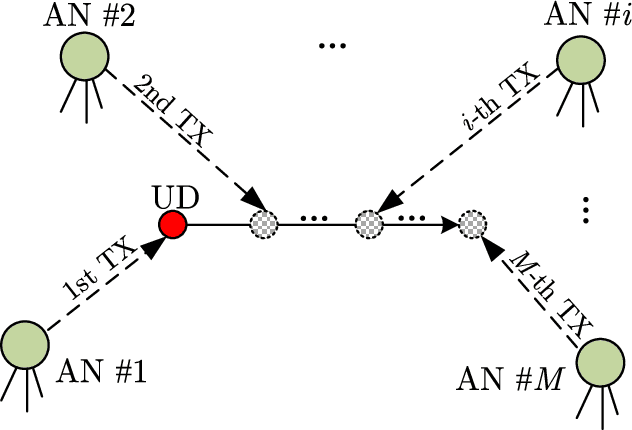
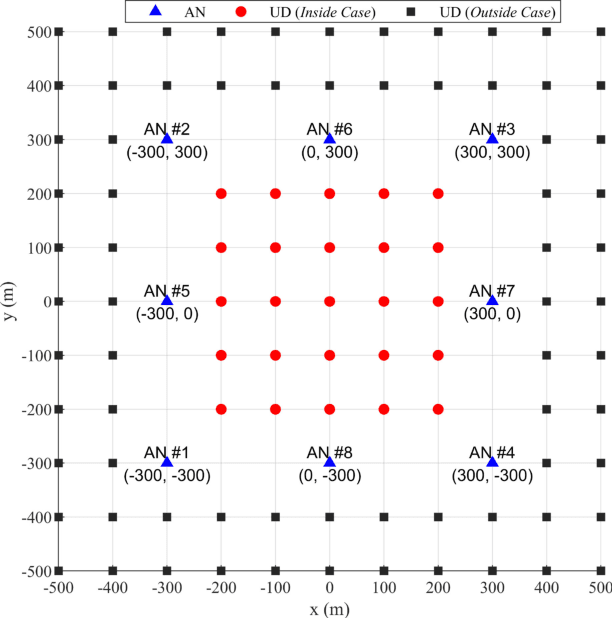
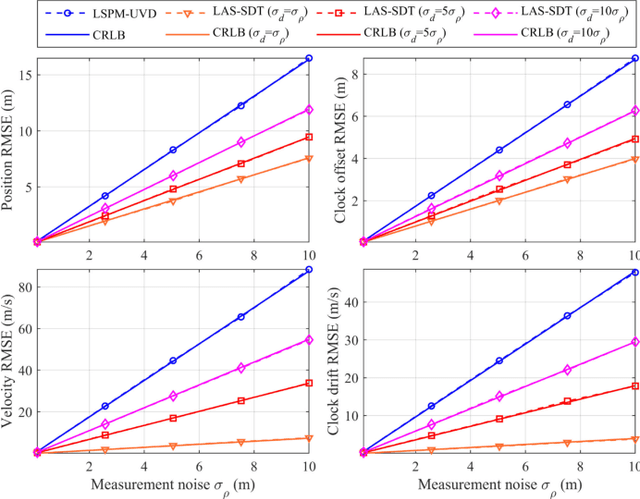
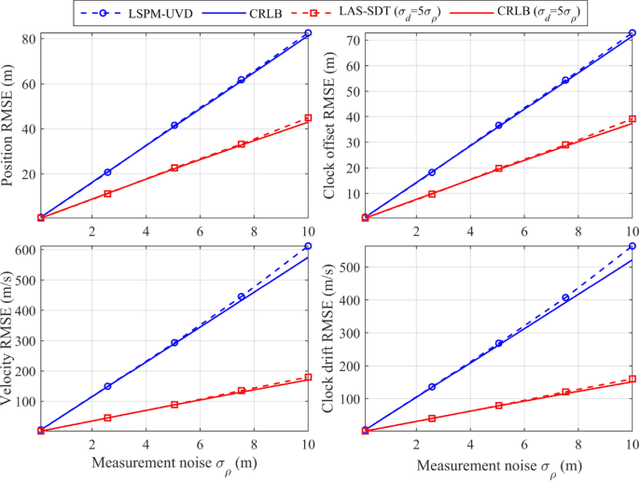
Doppler shift is an important measurement for localization and synchronization (LAS), and is available in various practical systems. Existing studies on LAS techniques in a time division broadcast LAS system (TDBS) only use sequential time-of-arrival (TOA) measurements from the broadcast signals. In this paper, we develop a new optimal LAS method in the TDBS, namely LAS-SDT, by taking advantage of the sequential Doppler shift and TOA measurements. It achieves higher accuracy compared with the conventional TOA-only method for user devices (UDs) with motion and clock drift. Another two variant methods, LAS-SDT-v for the case with UD velocity aiding, and LAS-SDT-k for the case with UD clock drift aiding, are developed. We derive the Cramer-Rao lower bound (CRLB) for these different cases. We show analytically that the accuracies of the estimated UD position, clock offset, velocity and clock drift are all significantly higher than those of the conventional LAS method using TOAs only. Numerical results corroborate the theoretical analysis and show the optimal estimation performance of the LAS-SDT.
Closed-form Two-way TOA Localization and Synchronization for User Devices with Motion and Clock Drift
Nov 13, 2021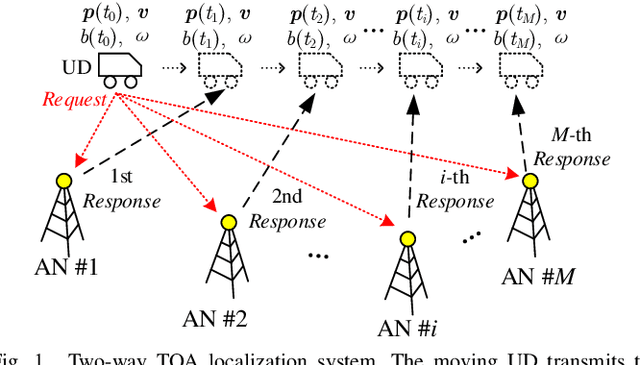
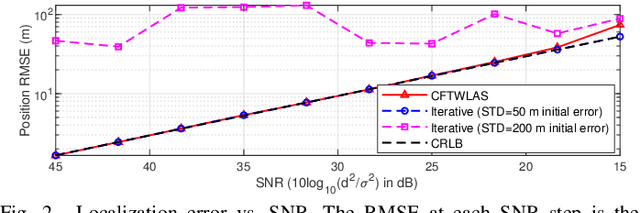
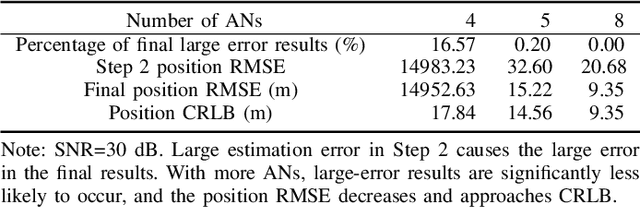
A two-way time-of-arrival (TOA system is composed of anchor nodes (ANs and user devices (UDs . Two-way TOA measurements between AN-UD pairs are obtained via round-trip communications to achieve localization and synchronization (LAS for a UD. Existing LAS method for a moving UD with clock drift adopts an iterative algorithm, which requires accurate initialization and has high computational complexity. In this paper, we propose a new closed-form two-way TOA LAS approach, namely CFTWLAS, which does not require initialization, has low complexity and empirically achieves optimal LAS accuracy. We first linearize the LAS problem by squaring and differencing the two-way TOA equations. We employ two auxiliary variables to simplify the problem to finding the analytical solution of quadratic equations. Due to the measurement noise, we can only obtain a raw LAS estimation from the solution of the auxiliary variables. Then, a weighted least squares step is applied to further refine the raw estimation. We analyze the theoretical error of the new CFTWLAS and show that it empirically reaches the Cramer-Rao lower bound (CRLB with sufficient ANs under the condition with proper geometry and small noise. Numerical results in a 3D scenario verify the theoretical analysis that the estimation accuracy of the new CFTWLAS method reaches CRLB in the presented experiments when the number of the ANs is large, the geometry is appropriate, and the noise is small. Unlike the iterative method whose complexity increases with the iteration count, the new CFTWLAS has constant low complexity.
New Closed-form Joint Localization and Synchronization using Sequential TOAs in a Multi-agent System
Jan 30, 2021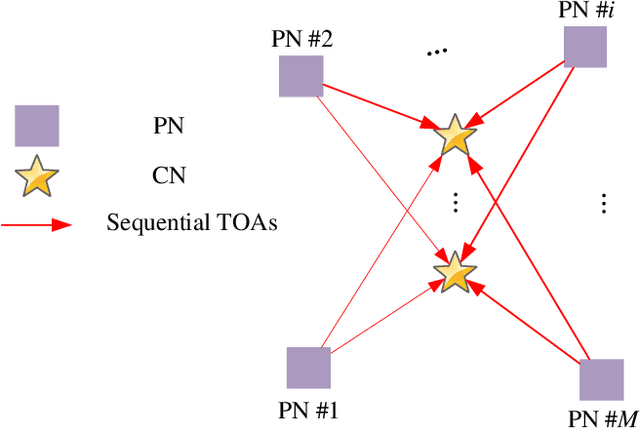
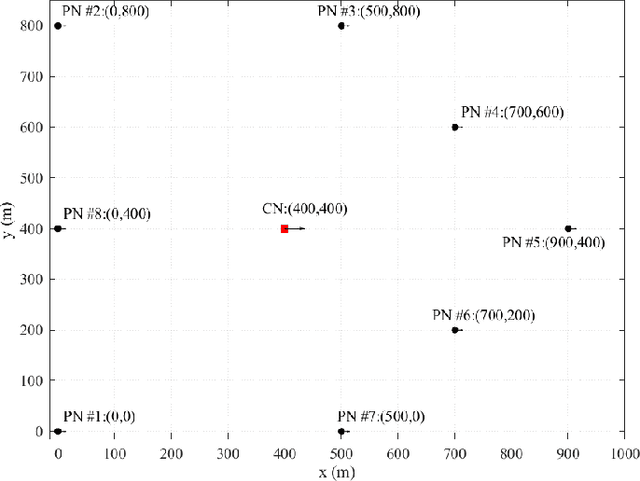
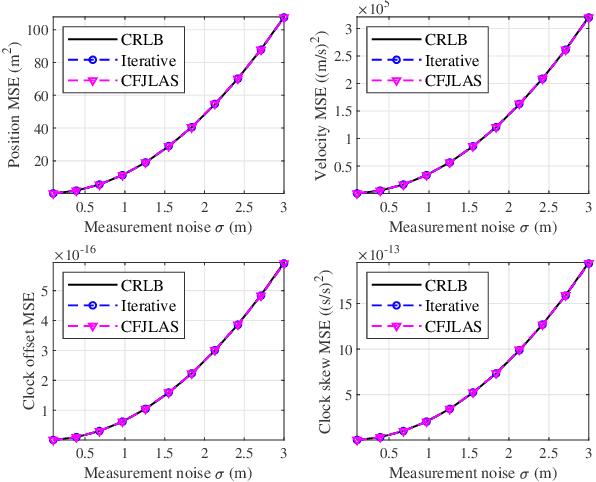
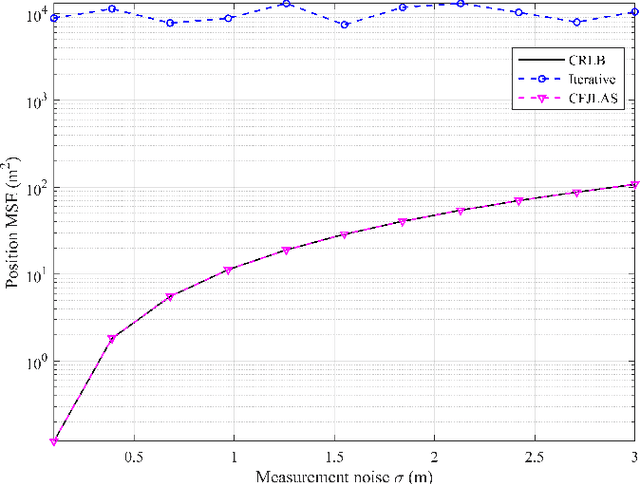
In a multi-agent system (MAS) comprised of parent nodes (PNs) and child nodes (CNs), a relative spatiotemporal coordinate is established by the PNs with known positions. It is an essential technique for the moving CNs to resolve the joint localization and synchronization (JLAS) problem in the MAS. Existing methods using sequential time-of-arrival (TOA) measurements from the PNs' broadcast signals either require a good initial guess or have high computational complexity. In this paper, we propose a new closed-form JLAS approach, namely CFJLAS, which achieves optimal solution without initialization, and has low computational complexity. We first linearize the relation between the estimated parameter and the sequential TOA measurement by squaring and differencing the TOA measurement equations. By devising two intermediate variables, we are able to simplify the problem to finding the solution of a quadratic equation set. Finally, we apply a weighted least squares (WLS) step using the residuals of all the measurements to optimize the estimation. We derive the Cramer-Rao lower bound (CRLB), analyze the estimation error, and show that the estimation accuracy of the CFJLAS reaches CRLB under small noise condition. The complexity of the CFJLAS is studied and compared with the iterative method. Simulations in the 2D scene verify that the estimation accuracy of the new CFJLAS method in position, velocity, clock offset, and clock skew all reaches CRLB. Compared with the conventional iterative method, which requires a good initial guess to converge to the correct estimation and has growing complexity with more iterations, the proposed new CFJLAS method does not require initialization, always obtains the optimal solution and has constant low computational complexity.