 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNew Closed-form Joint Localization and Synchronization using Sequential TOAs in a Multi-agent System
Paper and Code
Jan 30, 2021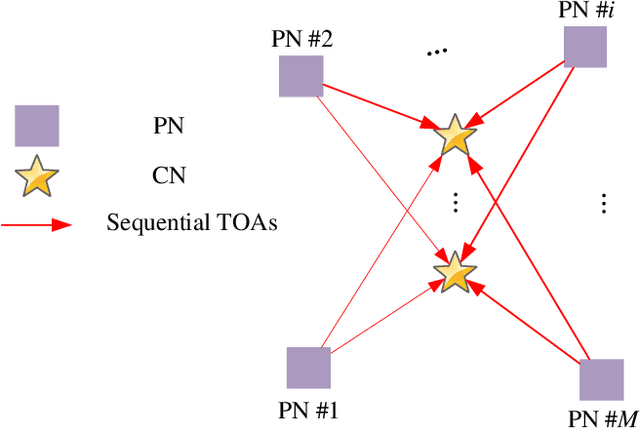
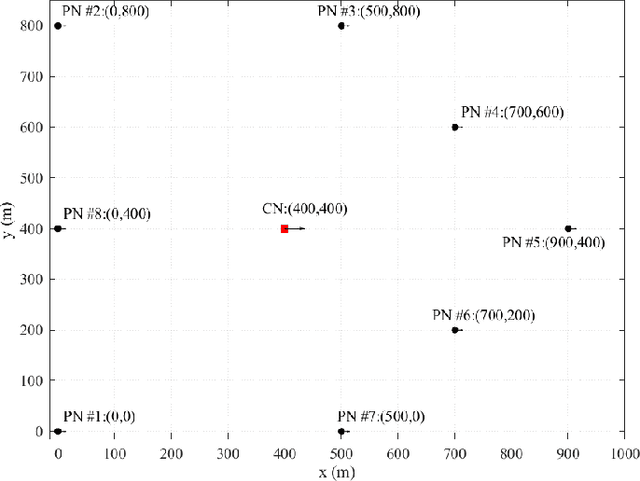
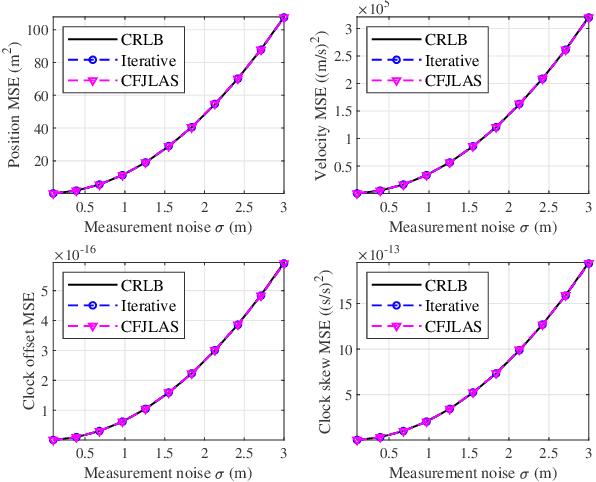
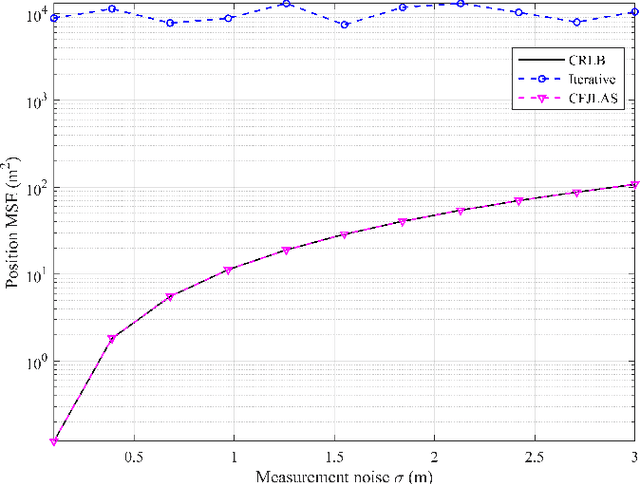
In a multi-agent system (MAS) comprised of parent nodes (PNs) and child nodes (CNs), a relative spatiotemporal coordinate is established by the PNs with known positions. It is an essential technique for the moving CNs to resolve the joint localization and synchronization (JLAS) problem in the MAS. Existing methods using sequential time-of-arrival (TOA) measurements from the PNs' broadcast signals either require a good initial guess or have high computational complexity. In this paper, we propose a new closed-form JLAS approach, namely CFJLAS, which achieves optimal solution without initialization, and has low computational complexity. We first linearize the relation between the estimated parameter and the sequential TOA measurement by squaring and differencing the TOA measurement equations. By devising two intermediate variables, we are able to simplify the problem to finding the solution of a quadratic equation set. Finally, we apply a weighted least squares (WLS) step using the residuals of all the measurements to optimize the estimation. We derive the Cramer-Rao lower bound (CRLB), analyze the estimation error, and show that the estimation accuracy of the CFJLAS reaches CRLB under small noise condition. The complexity of the CFJLAS is studied and compared with the iterative method. Simulations in the 2D scene verify that the estimation accuracy of the new CFJLAS method in position, velocity, clock offset, and clock skew all reaches CRLB. Compared with the conventional iterative method, which requires a good initial guess to converge to the correct estimation and has growing complexity with more iterations, the proposed new CFJLAS method does not require initialization, always obtains the optimal solution and has constant low computational complexity.