 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGC-GAT: Multimodal Vehicular Trajectory Prediction using Graph Goal Conditioning and Cross-context Attention
Apr 15, 2025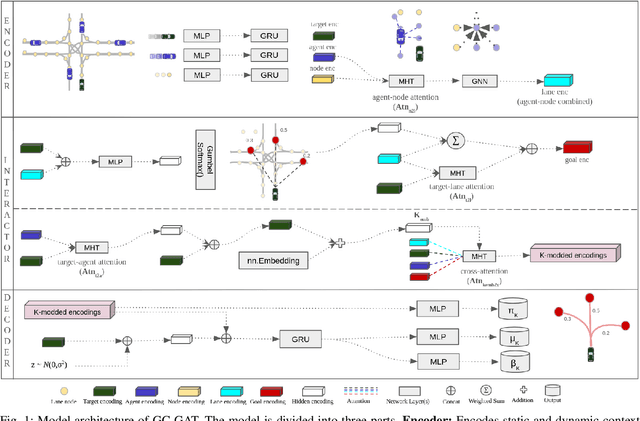
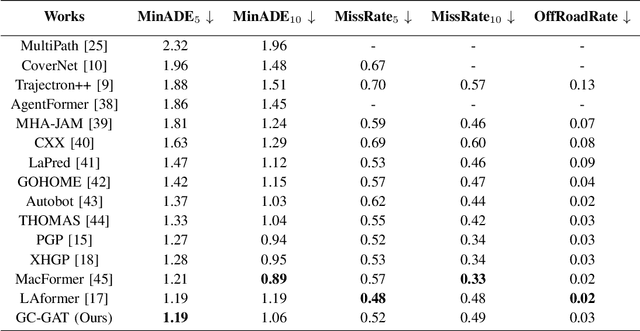

Predicting future trajectories of surrounding vehicles heavily relies on what contextual information is given to a motion prediction model. The context itself can be static (lanes, regulatory elements, etc) or dynamic (traffic participants). This paper presents a lane graph-based motion prediction model that first predicts graph-based goal proposals and later fuses them with cross attention over multiple contextual elements. We follow the famous encoder-interactor-decoder architecture where the encoder encodes scene context using lightweight Gated Recurrent Units, the interactor applies cross-context attention over encoded scene features and graph goal proposals, and the decoder regresses multimodal trajectories via Laplacian Mixture Density Network from the aggregated encodings. Using cross-attention over graph-based goal proposals gives robust trajectory estimates since the model learns to attend to future goal-relevant scene elements for the intended agent. We evaluate our work on nuScenes motion prediction dataset, achieving state-of-the-art results.
Pedestrian motion prediction evaluation for urban autonomous driving
Oct 22, 2024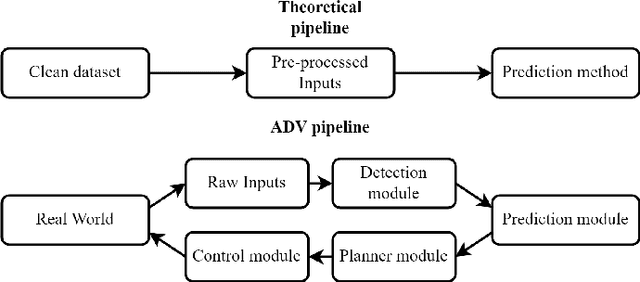



Pedestrian motion prediction is a key part of the modular-based autonomous driving pipeline, ensuring safe, accurate, and timely awareness of human agents' possible future trajectories. The autonomous vehicle can use this information to prevent any possible accidents and create a comfortable and pleasant driving experience for the passengers and pedestrians. A wealth of research was done on the topic from the authors of robotics, computer vision, intelligent transportation systems, and other fields. However, a relatively unexplored angle is the integration of the state-of-art solutions into existing autonomous driving stacks and evaluating them in real-life conditions rather than sanitized datasets. We analyze selected publications with provided open-source solutions and provide a perspective obtained by integrating them into existing Autonomous Driving framework - Autoware Mini and performing experiments in natural urban conditions in Tartu, Estonia to determine valuability of traditional motion prediction metrics. This perspective should be valuable to any potential autonomous driving or robotics engineer looking for the real-world performance of the existing state-of-art pedestrian motion prediction problem. The code with instructions on accessing the dataset is available at https://github.com/dmytrozabolotnii/autoware_mini.
Forensic Writer Identification Using Microblogging Texts
Jul 31, 2020
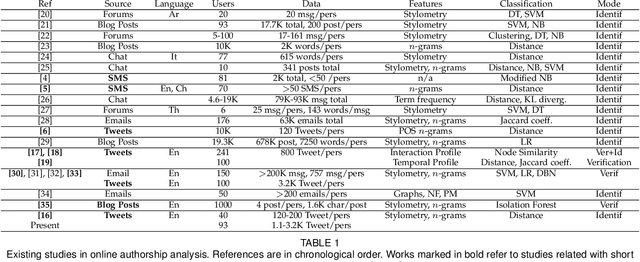
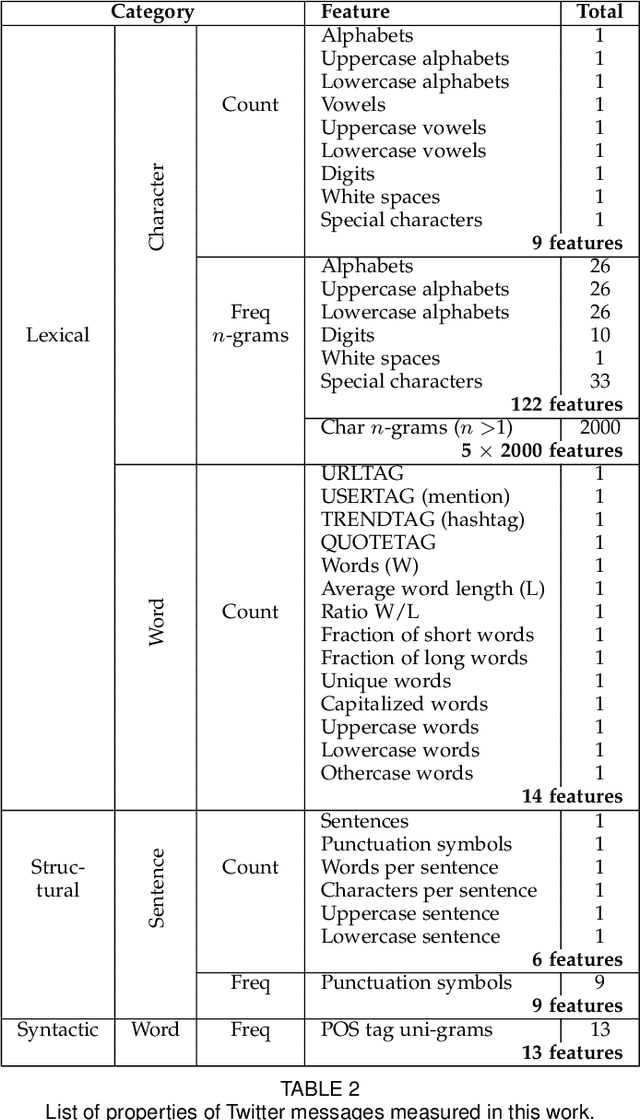
Establishing the authorship of online texts is a fundamental issue to combat several cybercrimes. Unfortunately, some platforms limit the length of the text, making the challenge harder. Here, we aim at identifying the author of Twitter messages limited to 140 characters. We evaluate popular stylometric features, widely used in traditional literary analysis, which capture the writing style at different levels (character, word, and sentence). We use a public database of 93 users, containing 1142 to 3209 Tweets per user. We also evaluate the influence of the number of Tweets per user for enrolment and testing. If the amount is sufficient (>500), a Rank 1 of 97-99% is achieved. If data is scarce (e.g. 20 Tweets for testing), the Rank 1 with the best individual feature method ranges from 54.9% (100 Tweets for enrolment) to 70.6% (1000 Tweets). By combining the available features, a substantial improvement is observed, reaching a Rank 1 of 70% when using 100 Tweets for enrolment and only 20 for testing. With a bigger hit list size, accuracy of the latter case increases to 86.4% (Rank 5) or 95% (Rank 20). This demonstrates the feasibility of identifying writers of digital texts, even with few data available.
Forensic Authorship Analysis of Microblogging Texts Using N-Grams and Stylometric Features
Mar 24, 2020


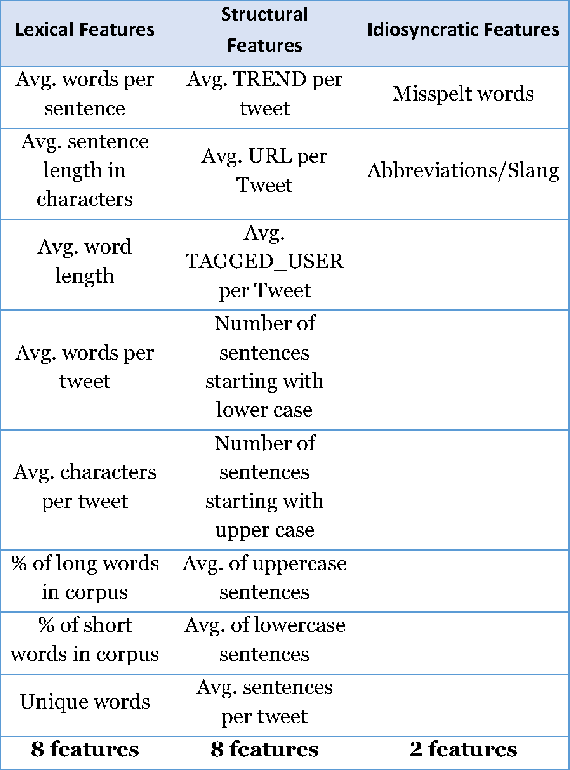
In recent years, messages and text posted on the Internet are used in criminal investigations. Unfortunately, the authorship of many of them remains unknown. In some channels, the problem of establishing authorship may be even harder, since the length of digital texts is limited to a certain number of characters. In this work, we aim at identifying authors of tweet messages, which are limited to 280 characters. We evaluate popular features employed traditionally in authorship attribution which capture properties of the writing style at different levels. We use for our experiments a self-captured database of 40 users, with 120 to 200 tweets per user. Results using this small set are promising, with the different features providing a classification accuracy between 92% and 98.5%. These results are competitive in comparison to existing studies which employ short texts such as tweets or SMS.
A Survey of End-to-End Driving: Architectures and Training Methods
Mar 13, 2020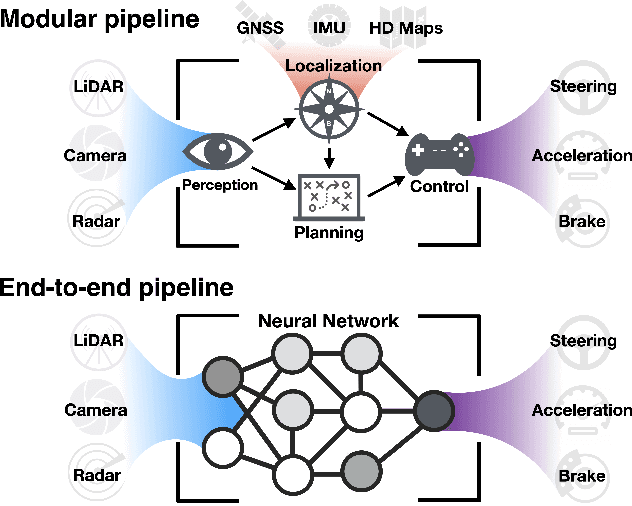
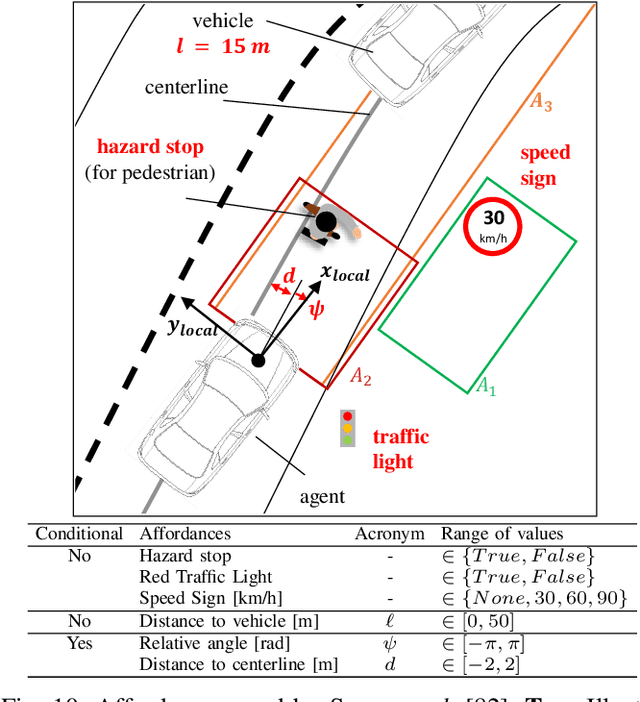

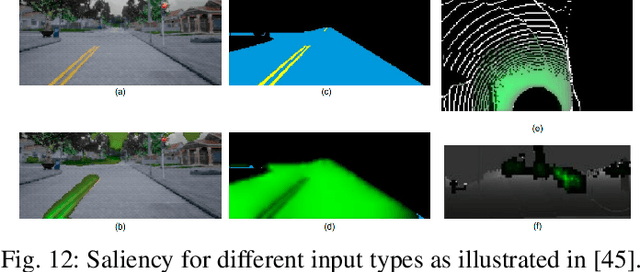
Autonomous driving is of great interest to industry and academia alike. The use of machine learning approaches for autonomous driving has long been studied, but mostly in the context of perception. In this paper we take a deeper look on the so called end-to-end approaches for autonomous driving, where the entire driving pipeline is replaced with a single neural network. We review the learning methods, input and output modalities, network architectures and evaluation schemes in end-to-end driving literature. Interpretability and safety are discussed separately, as they remain challenging for this approach. Beyond providing a comprehensive overview of existing methods, we conclude the review with an architecture that combines the most promising elements of the end-to-end autonomous driving systems.