 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGC-GAT: Multimodal Vehicular Trajectory Prediction using Graph Goal Conditioning and Cross-context Attention
Apr 15, 2025Predicting future trajectories of surrounding vehicles heavily relies on what contextual information is given to a motion prediction model. The context itself can be static (lanes, regulatory elements, etc) or dynamic (traffic participants). This paper presents a lane graph-based motion prediction model that first predicts graph-based goal proposals and later fuses them with cross attention over multiple contextual elements. We follow the famous encoder-interactor-decoder architecture where the encoder encodes scene context using lightweight Gated Recurrent Units, the interactor applies cross-context attention over encoded scene features and graph goal proposals, and the decoder regresses multimodal trajectories via Laplacian Mixture Density Network from the aggregated encodings. Using cross-attention over graph-based goal proposals gives robust trajectory estimates since the model learns to attend to future goal-relevant scene elements for the intended agent. We evaluate our work on nuScenes motion prediction dataset, achieving state-of-the-art results.
Pedestrian motion prediction evaluation for urban autonomous driving
Oct 22, 2024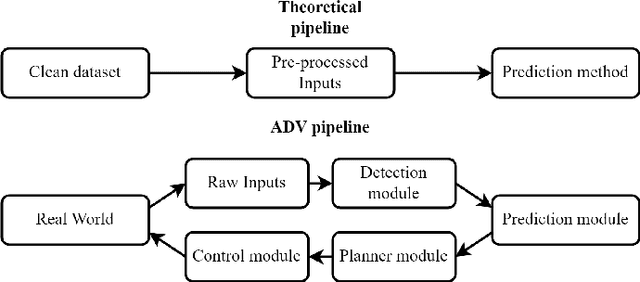



Pedestrian motion prediction is a key part of the modular-based autonomous driving pipeline, ensuring safe, accurate, and timely awareness of human agents' possible future trajectories. The autonomous vehicle can use this information to prevent any possible accidents and create a comfortable and pleasant driving experience for the passengers and pedestrians. A wealth of research was done on the topic from the authors of robotics, computer vision, intelligent transportation systems, and other fields. However, a relatively unexplored angle is the integration of the state-of-art solutions into existing autonomous driving stacks and evaluating them in real-life conditions rather than sanitized datasets. We analyze selected publications with provided open-source solutions and provide a perspective obtained by integrating them into existing Autonomous Driving framework - Autoware Mini and performing experiments in natural urban conditions in Tartu, Estonia to determine valuability of traditional motion prediction metrics. This perspective should be valuable to any potential autonomous driving or robotics engineer looking for the real-world performance of the existing state-of-art pedestrian motion prediction problem. The code with instructions on accessing the dataset is available at https://github.com/dmytrozabolotnii/autoware_mini.