 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNMM-HRI: Natural Multi-modal Human-Robot Interaction with Voice and Deictic Posture via Large Language Model
Jan 01, 2025



Translating human intent into robot commands is crucial for the future of service robots in an aging society. Existing Human-Robot Interaction (HRI) systems relying on gestures or verbal commands are impractical for the elderly due to difficulties with complex syntax or sign language. To address the challenge, this paper introduces a multi-modal interaction framework that combines voice and deictic posture information to create a more natural HRI system. The visual cues are first processed by the object detection model to gain a global understanding of the environment, and then bounding boxes are estimated based on depth information. By using a large language model (LLM) with voice-to-text commands and temporally aligned selected bounding boxes, robot action sequences can be generated, while key control syntax constraints are applied to avoid potential LLM hallucination issues. The system is evaluated on real-world tasks with varying levels of complexity using a Universal Robots UR3e manipulator. Our method demonstrates significantly better performance in HRI in terms of accuracy and robustness. To benefit the research community and the general public, we will make our code and design open-source.
Privacy-preserving Continual Federated Clustering via Adaptive Resonance Theory
Sep 07, 2023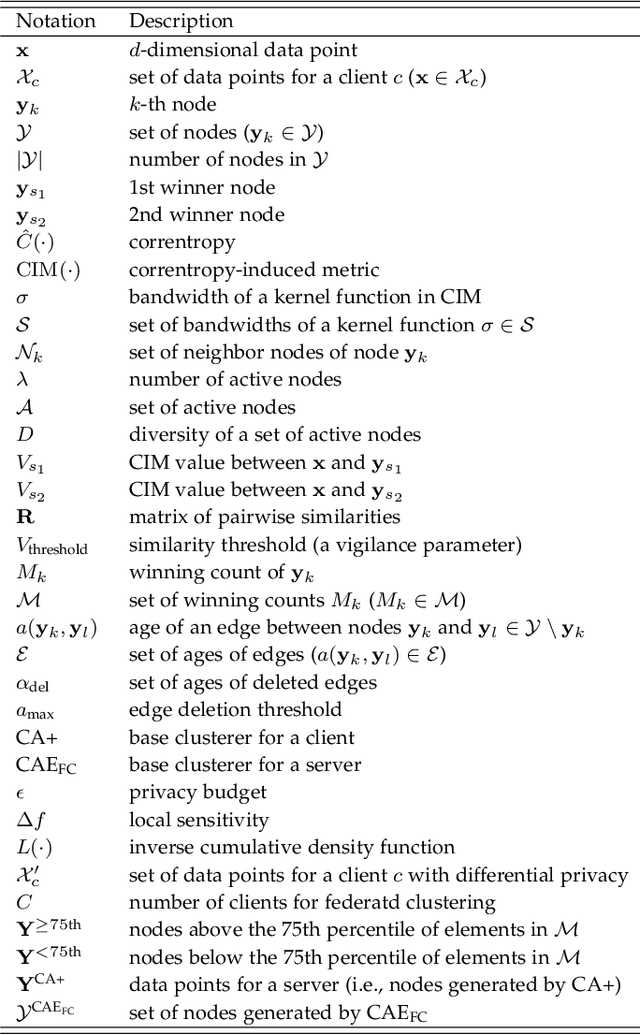


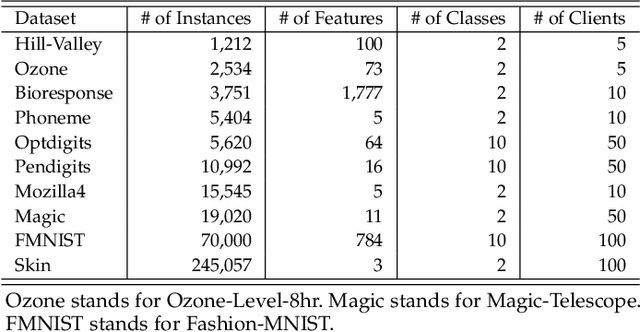
With the increasing importance of data privacy protection, various privacy-preserving machine learning methods have been proposed. In the clustering domain, various algorithms with a federated learning framework (i.e., federated clustering) have been actively studied and showed high clustering performance while preserving data privacy. However, most of the base clusterers (i.e., clustering algorithms) used in existing federated clustering algorithms need to specify the number of clusters in advance. These algorithms, therefore, are unable to deal with data whose distributions are unknown or continually changing. To tackle this problem, this paper proposes a privacy-preserving continual federated clustering algorithm. In the proposed algorithm, an adaptive resonance theory-based clustering algorithm capable of continual learning is used as a base clusterer. Therefore, the proposed algorithm inherits the ability of continual learning. Experimental results with synthetic and real-world datasets show that the proposed algorithm has superior clustering performance to state-of-the-art federated clustering algorithms while realizing data privacy protection and continual learning ability. The source code is available at \url{https://github.com/Masuyama-lab/FCAC}.
A Study on AI-FML Robotic Agent for Student Learning Behavior Ontology Construction
Jun 27, 2020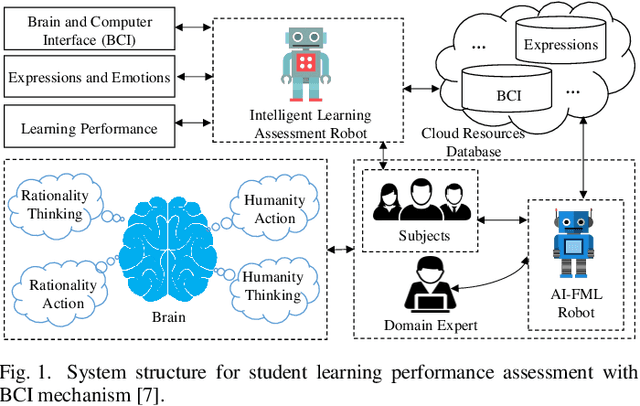
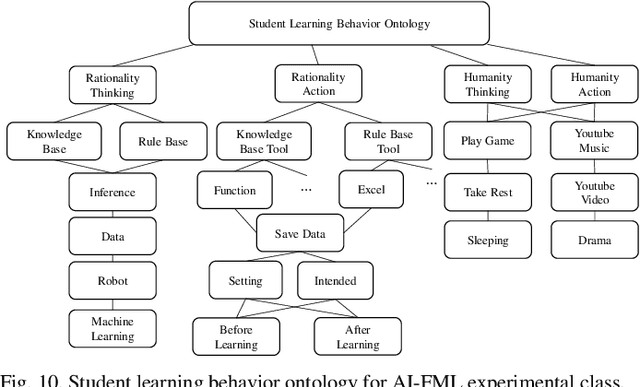
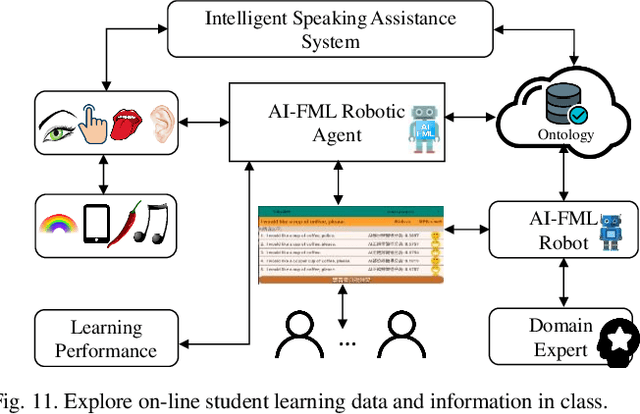
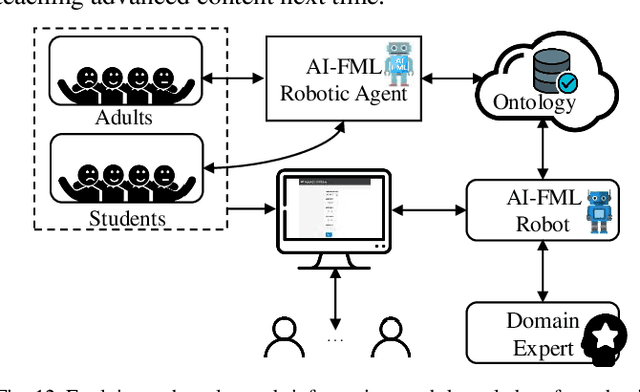
In this paper, we propose an AI-FML robotic agent for student learning behavior ontology construction which can be applied in English speaking and listening domain. The AI-FML robotic agent with the ontology contains the perception intelligence, computational intelligence, and cognition intelligence for analyzing student learning behavior. In addition, there are three intelligent agents, including a perception agent, a computational agent, and a cognition agent in the AI-FML robotic agent. We deploy the perception agent and the cognition agent on the robot Kebbi Air. Moreover, the computational agent with the Deep Neural Network (DNN) model is performed in the cloud and can communicate with the perception agent and cognition agent via the Internet. The proposed AI-FML robotic agent is applied in Taiwan and tested in Japan. The experimental results show that the agents can be utilized in the human and machine co-learning model for the future education.
Fuzzy Gesture Expression Model for an Interactive and Safe Robot Partner
Sep 26, 2019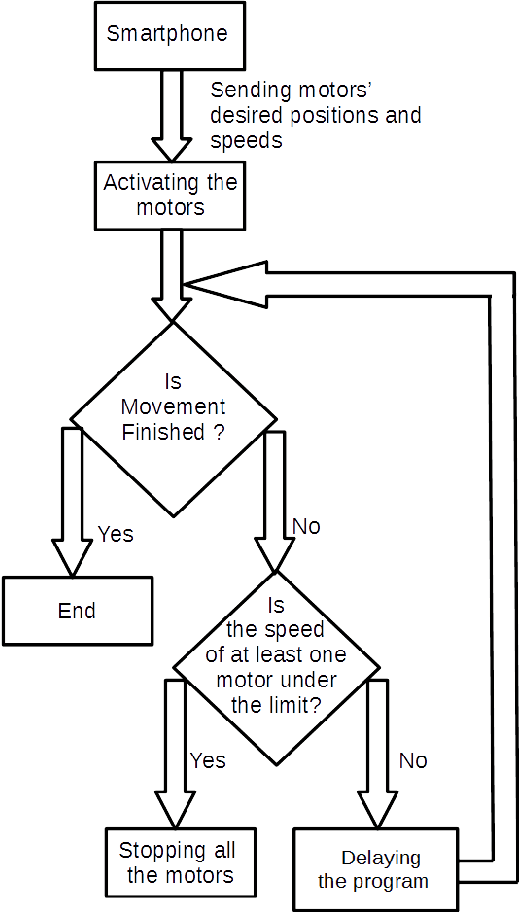
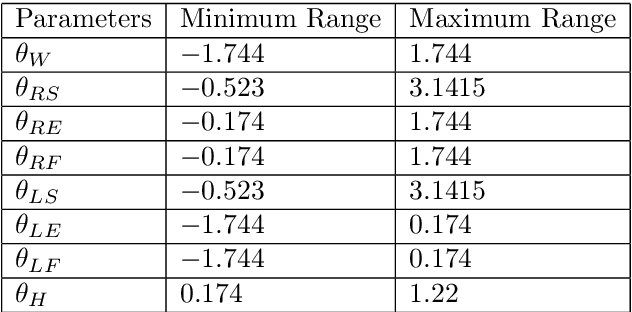
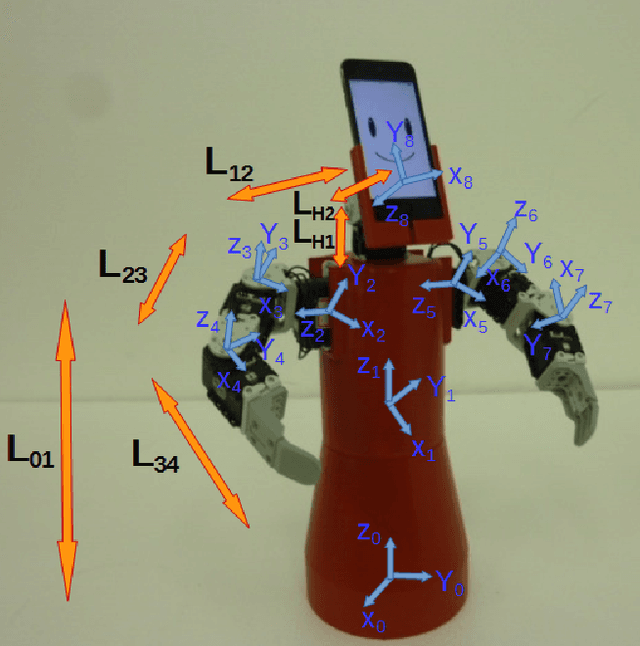
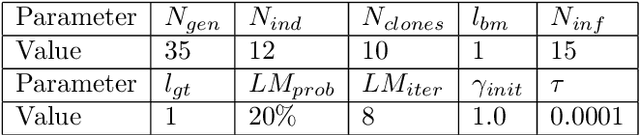
Interaction with a robot partner requires many elements, including not only speech but also embodiment. Thus, gestural and facial expressions are important for communication. Furthermore, understanding human movements is essential for safe and natural interchange. This paper proposes an interactive fuzzy emotional model for the robot partner's gesture expression, following its facial emotional model. First, we describe the physical interaction between the user and its robot partner. Next, we propose a kinematic model for the robot partner based on the Denavit-Hartenberg convention and solve the inverse kinematic transformation through Bacterial Memetic Algorithm. Then, the emotional model along its interactivity with the user is discussed. Finally, we show experimental results of the proposed model.
* 11 pages, 8 figures, accepted for publication in Journal of Network Intelligence
A GFML-based Robot Agent for Human and Machine Cooperative Learning on Game of Go
Jan 22, 2019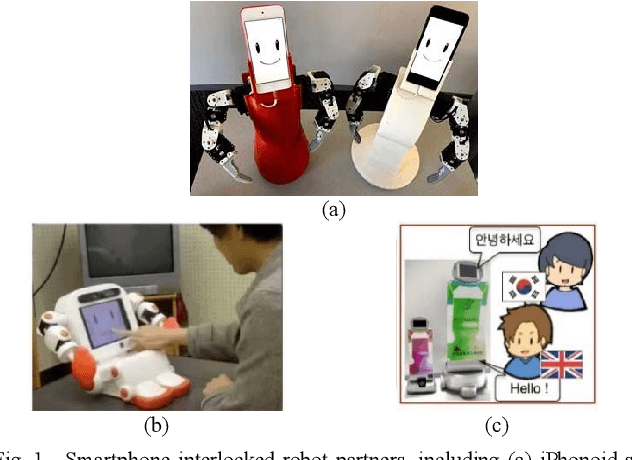
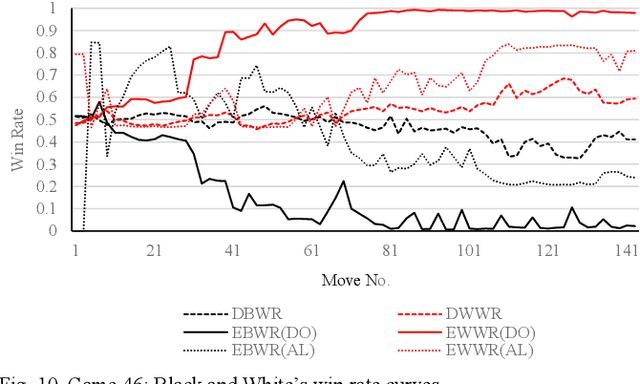
This paper applies a genetic algorithm and fuzzy markup language to construct a human and smart machine cooperative learning system on game of Go. The genetic fuzzy markup language (GFML)-based Robot Agent can work on various kinds of robots, including Palro, Pepper, and TMUs robots. We use the parameters of FAIR open source Darkforest and OpenGo AI bots to construct the knowledge base of Open Go Darkforest (OGD) cloud platform for student learning on the Internet. In addition, we adopt the data from AlphaGo Master sixty online games as the training data to construct the knowledge base and rule base of the co-learning system. First, the Darkforest predicts the win rate based on various simulation numbers and matching rates for each game on OGD platform, then the win rate of OpenGo is as the final desired output. The experimental results show that the proposed approach can improve knowledge base and rule base of the prediction ability based on Darkforest and OpenGo AI bot with various simulation numbers.
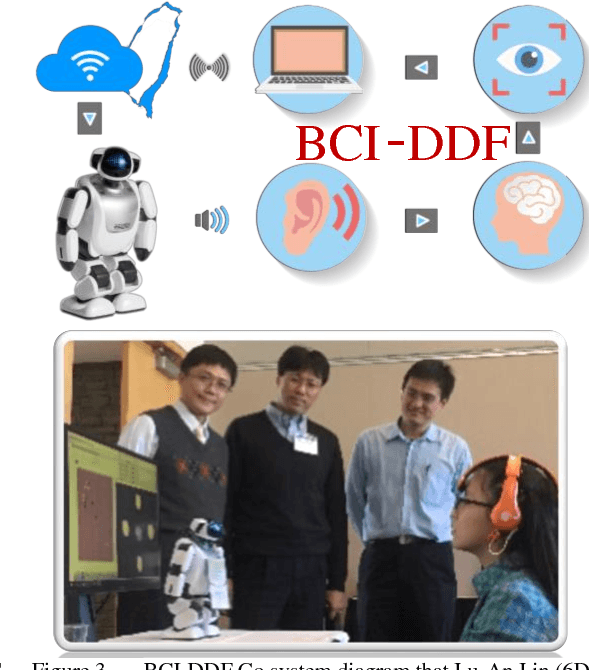
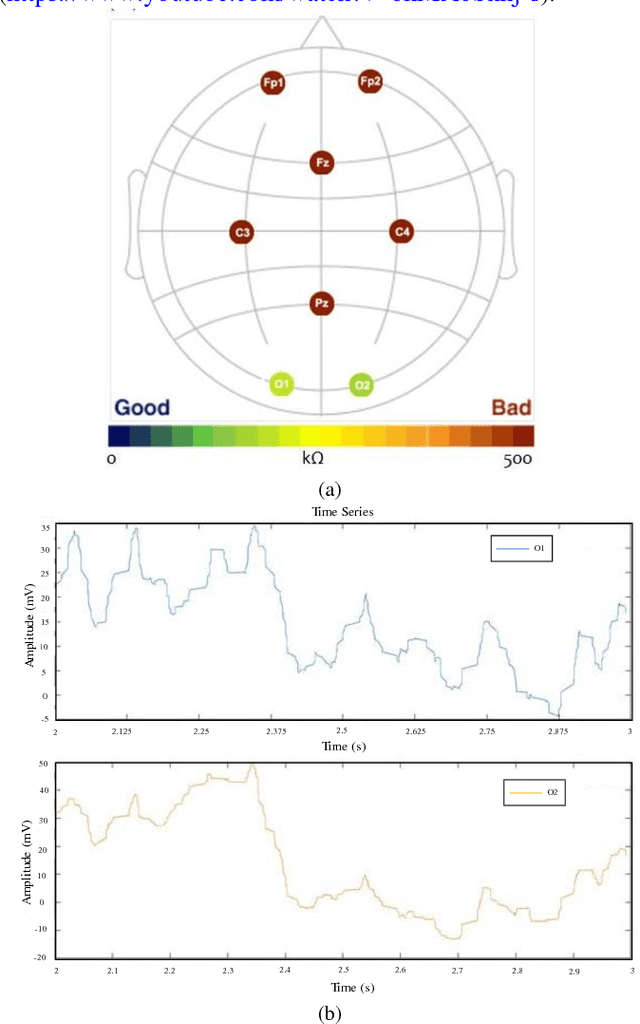
PFML-based Semantic BCI Agent for Game of Go Learning and Prediction
Jan 10, 2019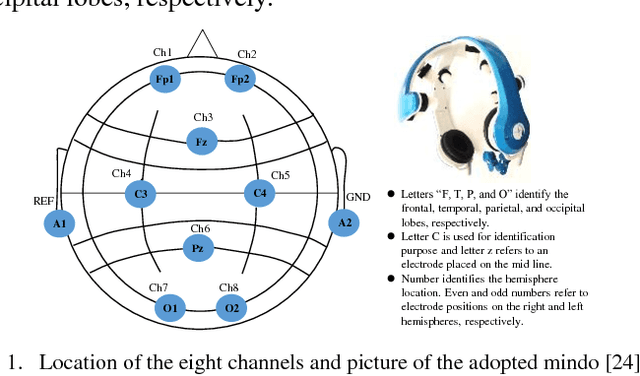
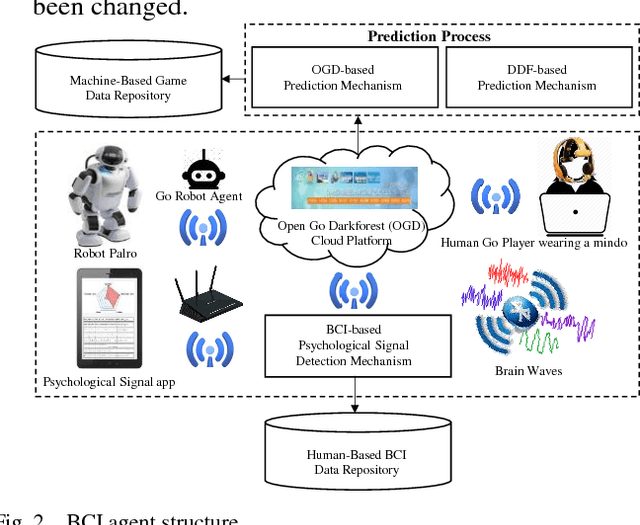
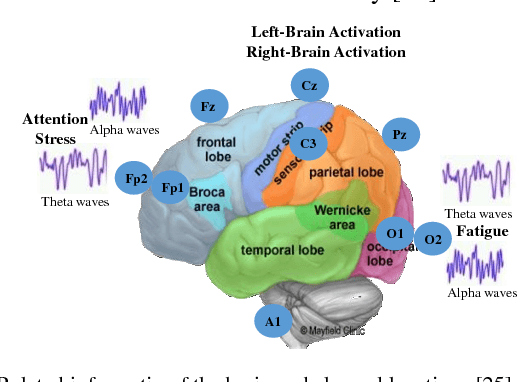
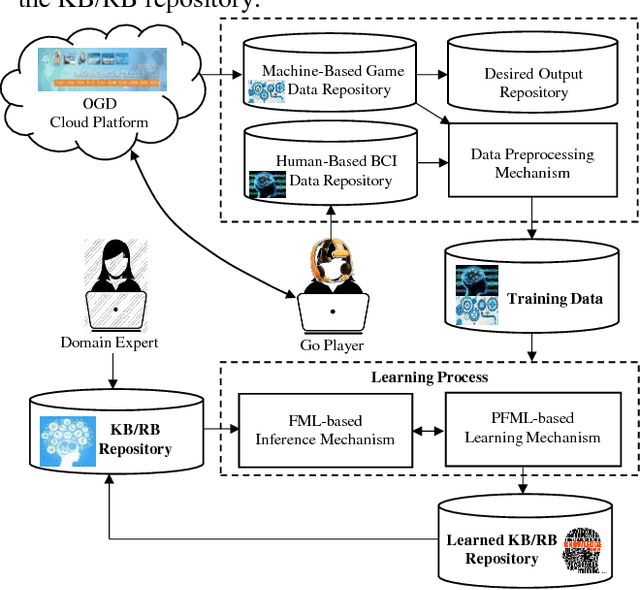
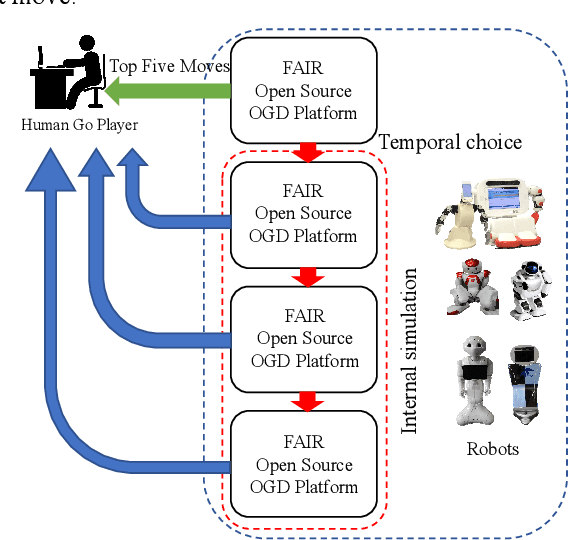
This paper presents a semantic brain computer interface (BCI) agent with particle swarm optimization (PSO) based on a Fuzzy Markup Language (FML) for Go learning and prediction applications. Additionally, we also establish an Open Go Darkforest (OGD) cloud platform with Facebook AI research (FAIR) open source Darkforest and ELF OpenGo AI bots. The Japanese robot Palro will simultaneously predict the move advantage in the board game Go to the Go players for reference or learning. The proposed semantic BCI agent operates efficiently by the human-based BCI data from their brain waves and machine-based game data from the prediction of the OGD cloud platform for optimizing the parameters between humans and machines. Experimental results show that the proposed human and smart machine co-learning mechanism performs favorably. We hope to provide students with a better online learning environment, combining different kinds of handheld devices, robots, or computer equipment, to achieve a desired and intellectual learning goal in the future.
Human and Smart Machine Co-Learning with Brain Computer Interface
Feb 19, 2018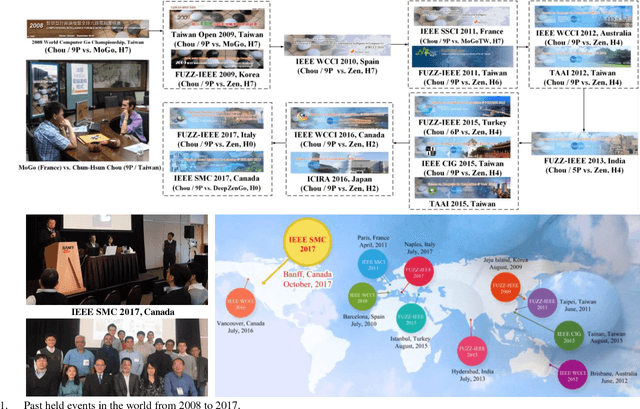
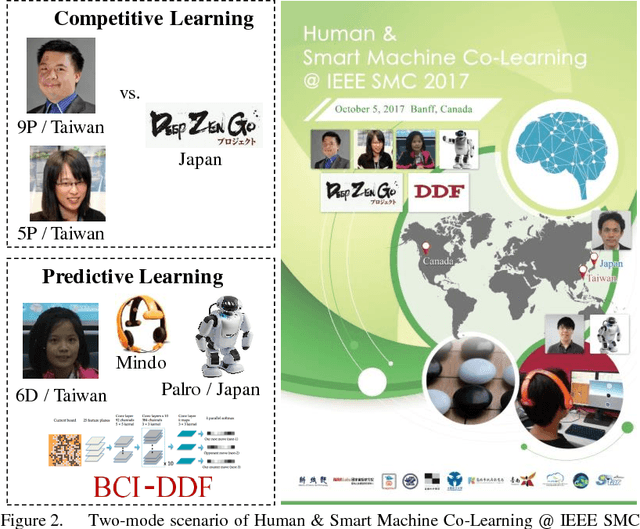
Machine learning has become a very popular approach for cybernetics systems, and it has always been considered important research in the Computational Intelligence area. Nevertheless, when it comes to smart machines, it is not just about the methodologies. We need to consider systems and cybernetics as well as include human in the loop. The purpose of this article is as follows: (1) To integrate the open source Facebook AI Research (FAIR) DarkForest program of Facebook with Item Response Theory (IRT), to the new open learning system, namely, DDF learning system; (2) To integrate DDF Go with Robot namely Robotic DDF Go system; (3) To invite the professional Go players to attend the activity to play Go games on site with a smart machine. The research team will apply this technology to education, such as, playing games to enhance the children concentration on learning mathematics, languages, and other topics. With the detected brainwaves, the robot will be able to speak some words that are very much to the point for the students and to assist the teachers in classroom in the future.
Ontology-based Fuzzy Markup Language Agent for Student and Robot Co-Learning
Jan 26, 2018
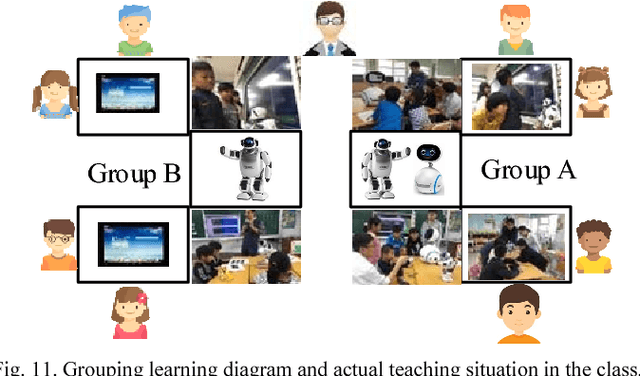
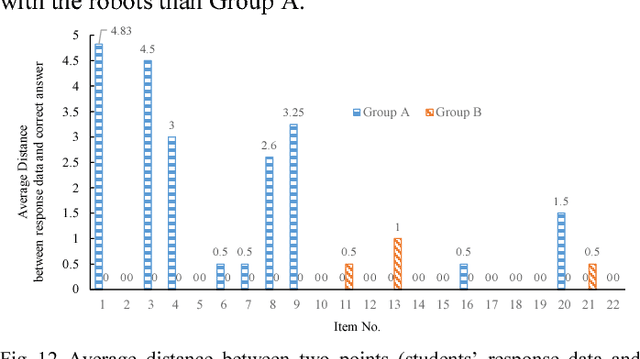
An intelligent robot agent based on domain ontology, machine learning mechanism, and Fuzzy Markup Language (FML) for students and robot co-learning is presented in this paper. The machine-human co-learning model is established to help various students learn the mathematical concepts based on their learning ability and performance. Meanwhile, the robot acts as a teacher's assistant to co-learn with children in the class. The FML-based knowledge base and rule base are embedded in the robot so that the teachers can get feedback from the robot on whether students make progress or not. Next, we inferred students' learning performance based on learning content's difficulty and students' ability, concentration level, as well as teamwork sprit in the class. Experimental results show that learning with the robot is helpful for disadvantaged and below-basic children. Moreover, the accuracy of the intelligent FML-based agent for student learning is increased after machine learning mechanism.
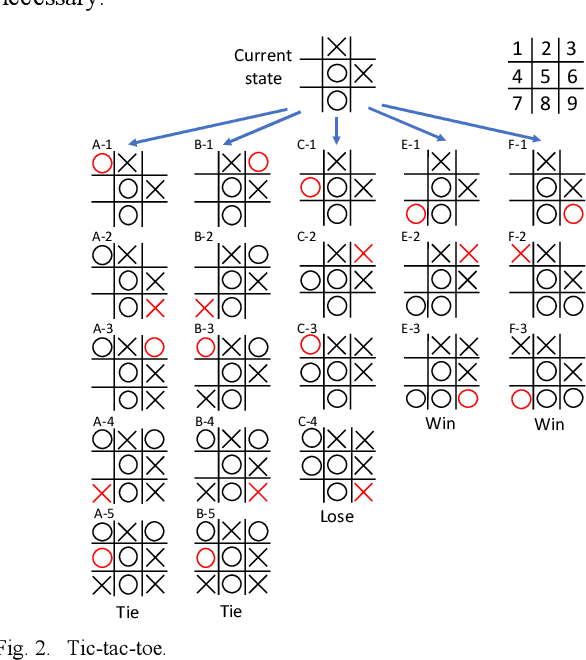
FML-based Dynamic Assessment Agent for Human-Machine Cooperative System on Game of Go
Jul 16, 2017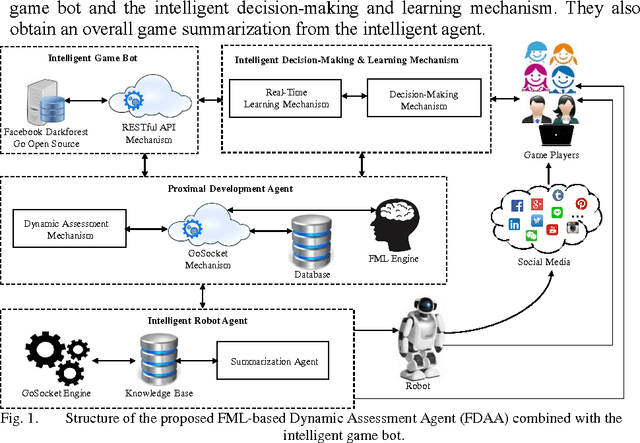
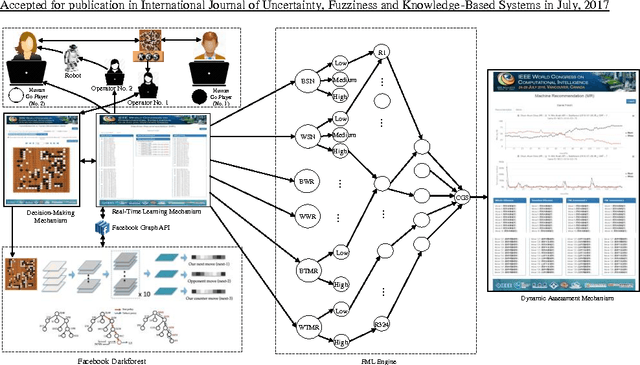
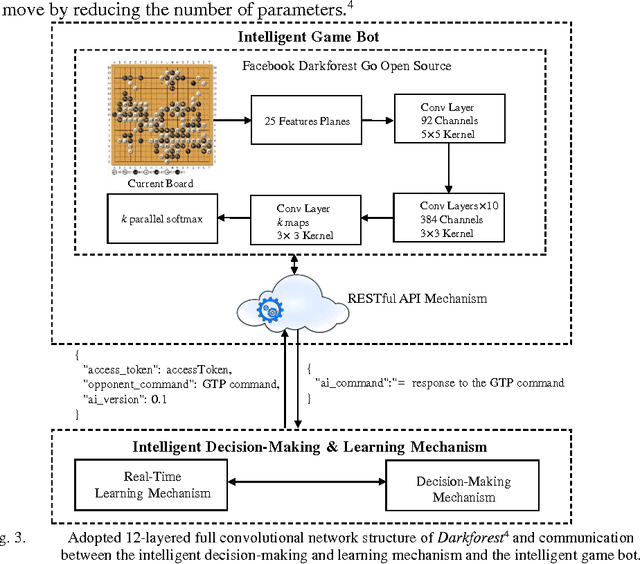
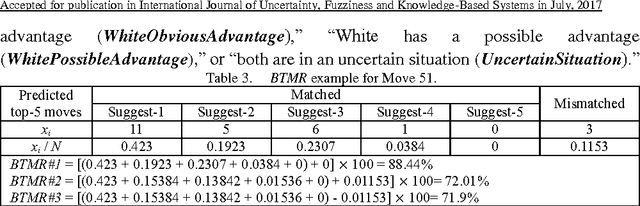
In this paper, we demonstrate the application of Fuzzy Markup Language (FML) to construct an FML-based Dynamic Assessment Agent (FDAA), and we present an FML-based Human-Machine Cooperative System (FHMCS) for the game of Go. The proposed FDAA comprises an intelligent decision-making and learning mechanism, an intelligent game bot, a proximal development agent, and an intelligent agent. The intelligent game bot is based on the open-source code of Facebook Darkforest, and it features a representational state transfer application programming interface mechanism. The proximal development agent contains a dynamic assessment mechanism, a GoSocket mechanism, and an FML engine with a fuzzy knowledge base and rule base. The intelligent agent contains a GoSocket engine and a summarization agent that is based on the estimated win rate, real-time simulation number, and matching degree of predicted moves. Additionally, the FML for player performance evaluation and linguistic descriptions for game results commentary are presented. We experimentally verify and validate the performance of the FDAA and variants of the FHMCS by testing five games in 2016 and 60 games of Google Master Go, a new version of the AlphaGo program, in January 2017. The experimental results demonstrate that the proposed FDAA can work effectively for Go applications.