 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzy Gesture Expression Model for an Interactive and Safe Robot Partner
Sep 26, 2019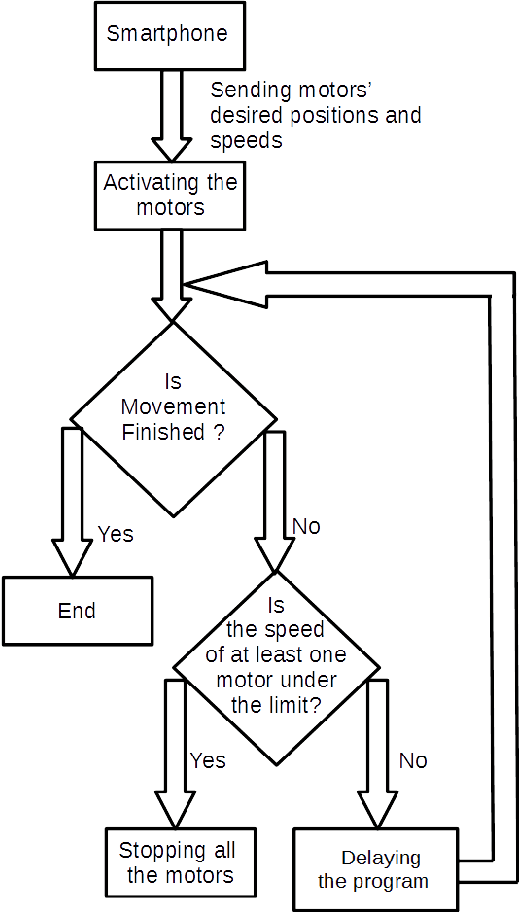
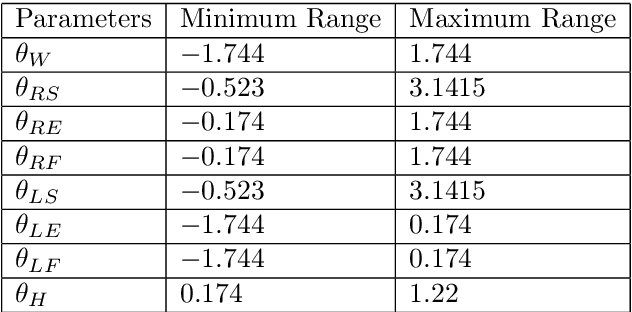
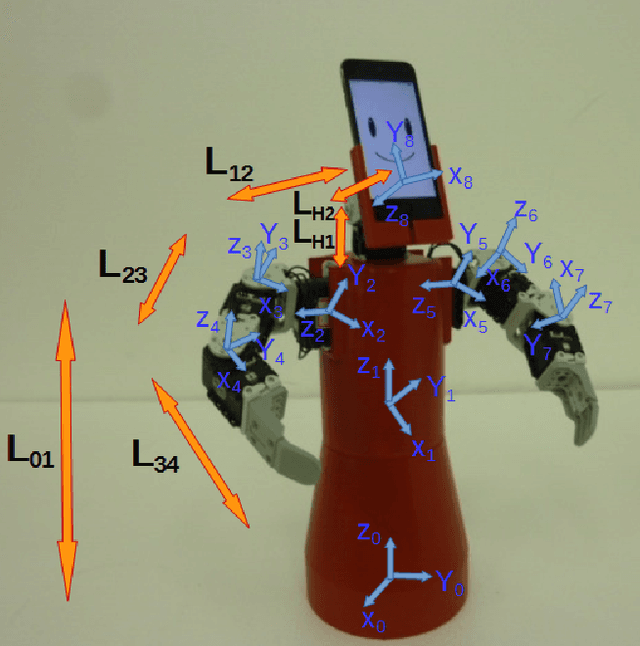
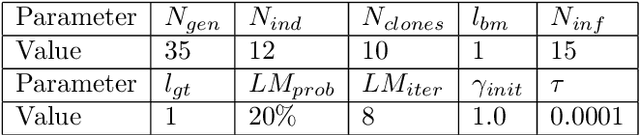
Interaction with a robot partner requires many elements, including not only speech but also embodiment. Thus, gestural and facial expressions are important for communication. Furthermore, understanding human movements is essential for safe and natural interchange. This paper proposes an interactive fuzzy emotional model for the robot partner's gesture expression, following its facial emotional model. First, we describe the physical interaction between the user and its robot partner. Next, we propose a kinematic model for the robot partner based on the Denavit-Hartenberg convention and solve the inverse kinematic transformation through Bacterial Memetic Algorithm. Then, the emotional model along its interactivity with the user is discussed. Finally, we show experimental results of the proposed model.
* 11 pages, 8 figures, accepted for publication in Journal of Network Intelligence