 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic System for Chemical Experiment Automation with Dual Demonstration of End-effector and Jig Operations
Jun 13, 2025While robotic automation has demonstrated remarkable performance, such as executing hundreds of experiments continuously over several days, it is challenging to design a program that synchronizes the robot's movements with the experimental jigs to conduct an experiment. We propose a concept that enables the automation of experiments by utilizing dual demonstrations of robot motions and jig operations by chemists in an experimental environment constructed to be controlled by a robot. To verify this concept, we developed a chemical-experiment-automation system consisting of jigs to assist the robot in experiments, a motion-demonstration interface, a jig-control interface, and a mobile manipulator. We validate the concept through polymer-synthesis experiments, focusing on critical liquid-handling tasks such as pipetting and dilution. The experimental results indicate high reproducibility of the demonstrated motions and robust task-success rates. This comprehensive concept not only simplifies the robot programming process for chemists but also provides a flexible and efficient solution to accommodate a wide range of experimental conditions, contributing significantly to the field of chemical experiment automation.
Incipient Slip Detection by Vibration Injection into Soft Sensor
Feb 19, 2024In robotic manipulation, preventing objects from slipping and establishing a secure grip on them is critical. Successful manipulation requires tactile sensors that detect the microscopic incipient slip phenomenon at the contact surface. Unfortunately, the tiny signals generated by incipient slip are quickly buried by environmental noise, and precise stress-distribution measurement requires an extensive optical system and integrated circuits. In this study, we focus on the macroscopic deformation of the entire fingertip's soft structure instead of directly observing the contact surface and its role as a vibration medium for sensing. The proposed method compresses the stick ratio's information into a one-dimensional pressure signal using the change in the propagation characteristics by vibration injection into the soft structure, which magnifies the microscopic incipient slip phenomena into the entire deformation. This mechanism allows a tactile sensor to use just a single vibration sensor. In the implemented system, a biomimetic tactile sensor is vibrated using a white signal from a PZT motor and utilizes frequency spectrum change of the propagated vibration as features. We investigated the proposed method's effectiveness on stick-ratio estimation and \red{stick-ratio stabilization} control during incipient slip. Our estimation error and the control performance results significantly outperformed the conventional methods.
Deep Segmented DMP Networks for Learning Discontinuous Motions
Sep 01, 2023



Discontinuous motion which is a motion composed of multiple continuous motions with sudden change in direction or velocity in between, can be seen in state-aware robotic tasks. Such robotic tasks are often coordinated with sensor information such as image. In recent years, Dynamic Movement Primitives (DMP) which is a method for generating motor behaviors suitable for robotics has garnered several deep learning based improvements to allow associations between sensor information and DMP parameters. While the implementation of deep learning framework does improve upon DMP's inability to directly associate to an input, we found that it has difficulty learning DMP parameters for complex motion which requires large number of basis functions to reconstruct. In this paper we propose a novel deep learning network architecture called Deep Segmented DMP Network (DSDNet) which generates variable-length segmented motion by utilizing the combination of multiple DMP parameters predicting network architecture, double-stage decoder network, and number of segments predictor. The proposed method is evaluated on both artificial data (object cutting & pick-and-place) and real data (object cutting) where our proposed method could achieve high generalization capability, task-achievement, and data-efficiency compared to previous method on generating discontinuous long-horizon motions.
Deep Koopman with Control: Spectral Analysis of Soft Robot Dynamics
Oct 14, 2022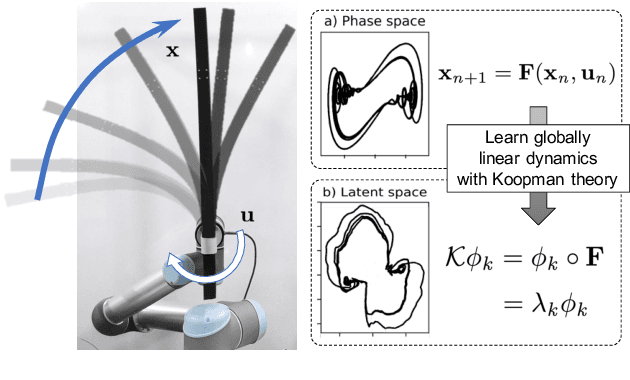
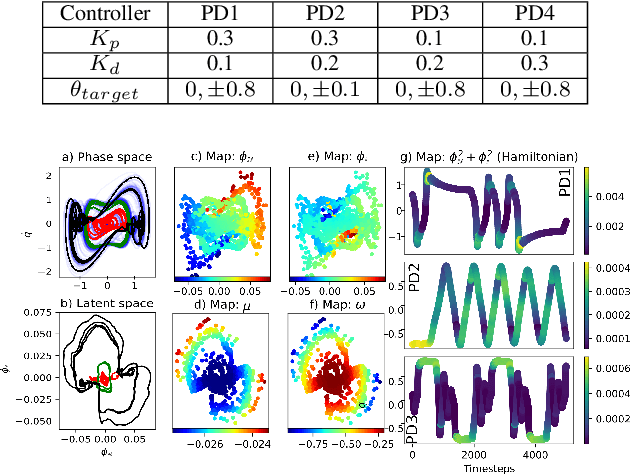
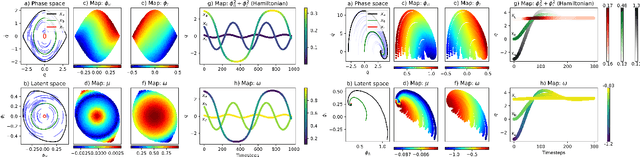

Soft robots are challenging to model and control as inherent non-linearities (e.g., elasticity and deformation), often requires complex explicit physics-based analytical modeling (e.g., a priori geometric definitions). While machine learning can be used to learn non-linear control models in a data-driven approach, these models often lack an intuitive internal physical interpretation and representation, limiting dynamical analysis. To address this, this paper presents an approach using Koopman operator theory and deep neural networks to provide a global linear description of the non-linear control systems. Specifically, by globally linearising dynamics, the Koopman operator is analyzed using spectral decomposition to characterises important physics-based interpretations, such as functional growths and oscillations. Experiments in this paper demonstrate this approach for controlling non-linear soft robotics, and shows model outputs are interpretable in the context of spectral analysis.
Tactile Perception based on Injected Vibration in Soft Sensor
Apr 20, 2021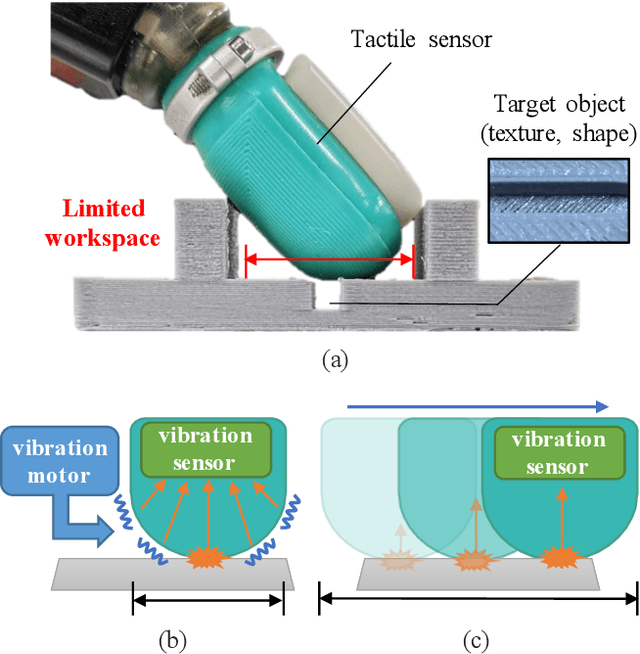
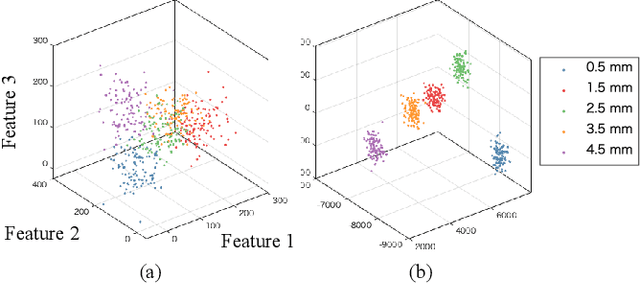
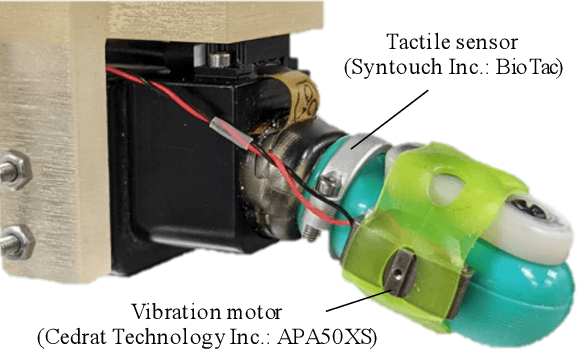
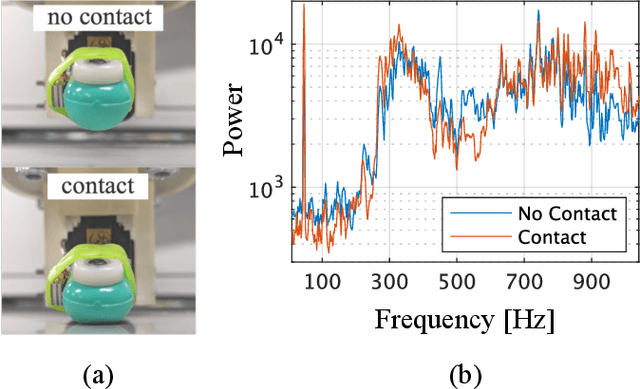
Tactile perception using vibration sensation helps robots recognize their environment's physical properties and perform complex tasks. A sliding motion is applied to target objects to generate tactile vibration data. However, situations exist where such a sliding motion is infeasible due to geometrical constraints in the environment or an object's fragility which cannot resist friction forces. This paper explores a novel approach to achieve vibration-based tactile perception without a sliding motion. To this end, our key idea is injecting a mechanical vibration into a soft tactile sensor system and measuring the propagated vibration inside it by a sensor. Soft tactile sensors are deformed by the contact state, and the touched objects' shape or texture should change the characteristics of the vibration propagation. Therefore, the propagated-vibration data are expected to contain useful information for recognizing touched environments. We developed a prototype system for a proof-of-concept: a mechanical vibration is applied to a biomimetic (soft and vibration-based) tactile sensor from a small, mounted piezoelectric actuator. As a verification experiment, we performed two classification tasks for sandpaper's grit size and a slit's gap widths using our approach and compared their accuracies with that of using sliding motions. Our approach resulted in 70% accuracy for the grit size classification and 99% accuracy for the gap width classification. These results are comparable to or better than the comparison methods with a sliding motion.