 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecompGrind: A Decomposition Framework for Robotic Grinding via Cutting-Surface Planning and Contact-Force Adaptation
Mar 24, 2026Robotic grinding is widely used for shaping workpieces in manufacturing, but it remains difficult to automate this process efficiently. In particular, efficiently grinding workpieces of different shapes and material hardness is challenging because removal resistance varies with local contact conditions. Moreover, it is difficult to achieve accurate estimation of removal resistance and analytical modeling of shape transition, and learning-based approaches often require large amounts of training data to cover diverse processing conditions. To address these challenges, we decompose robotic grinding into two components: removal-shape planning and contact-force adaptation. Based on this formulation, we propose DecompGrind, a framework that combines Global Cutting-Surface Planning (GCSP) and Local Contact-Force Adaptation (LCFA). GCSP determines removal shapes through geometric analysis of the current and target shapes without learning, while LCFA learns a contact-force adaptation policy using bilateral control-based imitation learning during the grinding of each removal shape. This decomposition restricts learning to local contact-force adaptation, allowing the policy to be learned from a small number of demonstrations, while handling global shape transition geometrically. Experiments using a robotic grinding system and 3D-printed workpieces demonstrate efficient robotic grinding of workpieces having different shapes and material hardness while maintaining safe levels of contact force.
Task-Relevant and Irrelevant Region-Aware Augmentation for Generalizable Vision-Based Imitation Learning in Agricultural Manipulation
Mar 05, 2026Vision-based imitation learning has shown promise for robotic manipulation; however, its generalization remains limited in practical agricultural tasks. This limitation stems from scarce demonstration data and substantial visual domain gaps caused by i) crop-specific appearance diversity and ii) background variations. To address this limitation, we propose Dual-Region Augmentation for Imitation Learning (DRAIL), a region-aware augmentation framework designed for generalizable vision-based imitation learning in agricultural manipulation. DRAIL explicitly separates visual observations into task-relevant and task-irrelevant regions. The task-relevant region is augmented in a domain-knowledge-driven manner to preserve essential visual characteristics, while the task-irrelevant region is aggressively randomized to suppress spurious background correlations. By jointly handling both sources of visual variation, DRAIL promotes learning policies that rely on task-essential features rather than incidental visual cues. We evaluate DRAIL on diffusion policy-based visuomotor controllers through robot experiments on artificial vegetable harvesting and real lettuce defective leaf picking preparation tasks. The results show consistent improvements in success rates under unseen visual conditions compared to baseline methods. Further attention analysis and representation generalization metrics indicate that the learned policies rely more on task-essential visual features, resulting in enhanced robustness and generalization.
Robotic System for Chemical Experiment Automation with Dual Demonstration of End-effector and Jig Operations
Jun 13, 2025While robotic automation has demonstrated remarkable performance, such as executing hundreds of experiments continuously over several days, it is challenging to design a program that synchronizes the robot's movements with the experimental jigs to conduct an experiment. We propose a concept that enables the automation of experiments by utilizing dual demonstrations of robot motions and jig operations by chemists in an experimental environment constructed to be controlled by a robot. To verify this concept, we developed a chemical-experiment-automation system consisting of jigs to assist the robot in experiments, a motion-demonstration interface, a jig-control interface, and a mobile manipulator. We validate the concept through polymer-synthesis experiments, focusing on critical liquid-handling tasks such as pipetting and dilution. The experimental results indicate high reproducibility of the demonstrated motions and robust task-success rates. This comprehensive concept not only simplifies the robot programming process for chemists but also provides a flexible and efficient solution to accommodate a wide range of experimental conditions, contributing significantly to the field of chemical experiment automation.
Cutting Sequence Diffuser: Sim-to-Real Transferable Planning for Object Shaping by Grinding
Dec 19, 2024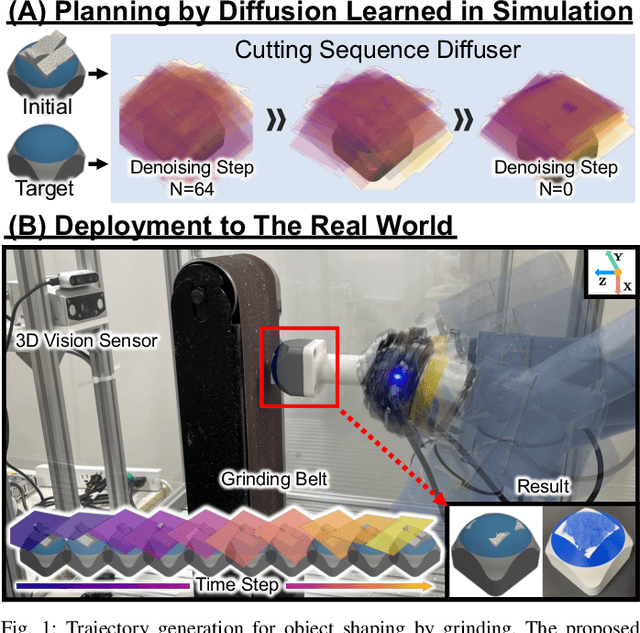
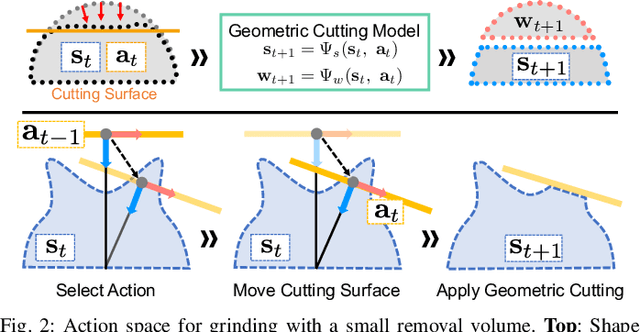
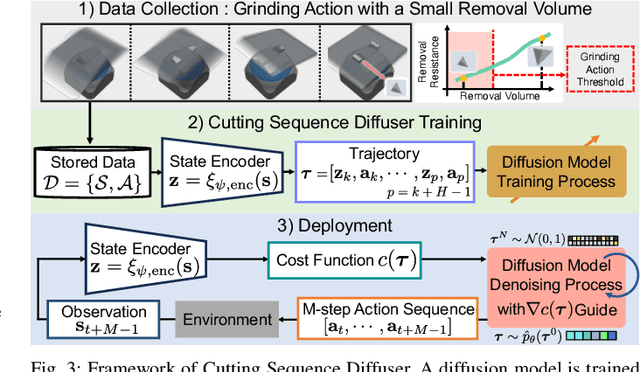
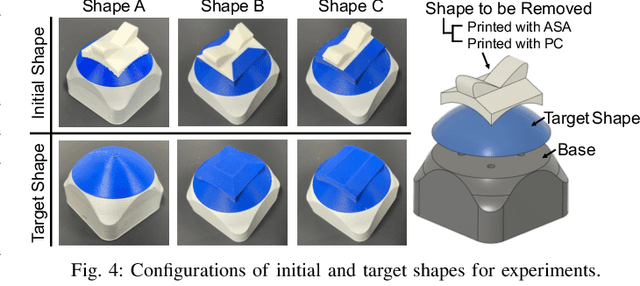
Automating object shaping by grinding with a robot is a crucial industrial process that involves removing material with a rotating grinding belt. This process generates removal resistance depending on such process conditions as material type, removal volume, and robot grinding posture, all of which complicate the analytical modeling of shape transitions. Additionally, a data-driven approach based on real-world data is challenging due to high data collection costs and the irreversible nature of the process. This paper proposes a Cutting Sequence Diffuser (CSD) for object shaping by grinding. The CSD, which only requires simple simulation data for model learning, offers an efficient way to plan long-horizon action sequences transferable to the real world. Our method designs a smooth action space with constrained small removal volumes to suppress the complexity of the shape transitions caused by removal resistance, thus reducing the reality gap in simulations. Moreover, by using a diffusion model to generate long-horizon action sequences, our approach reduces the planning time and allows for grinding the target shape while adhering to the constraints of a small removal volume per step. Through evaluations in both simulation and real robot experiments, we confirmed that our CSD was effective for grinding to different materials and various target shapes in a short time.
Learning to Shape by Grinding: Cutting-surface-aware Model-based Reinforcement Learning
Aug 04, 2023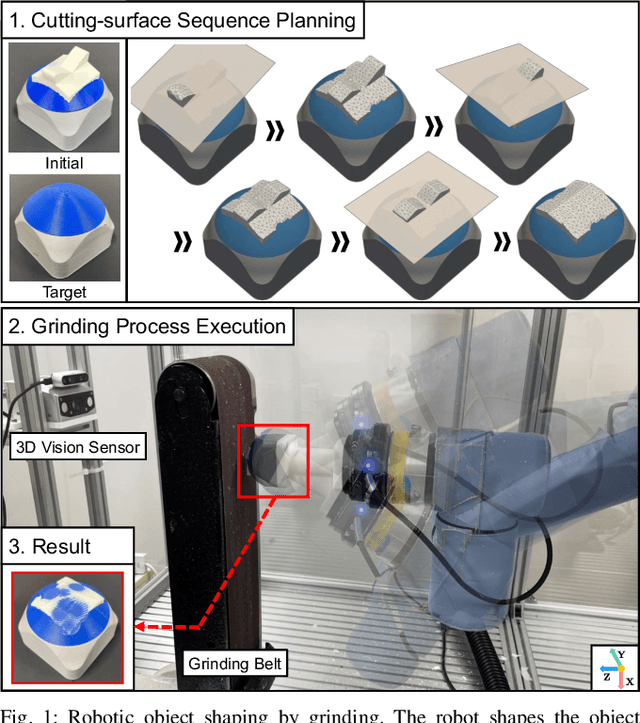
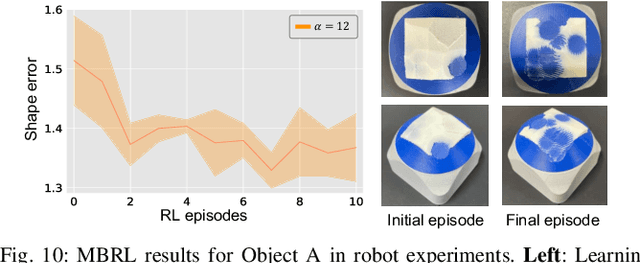
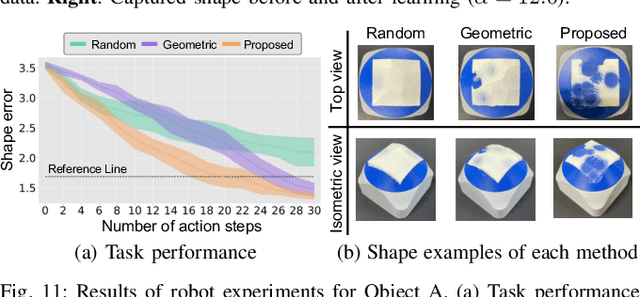
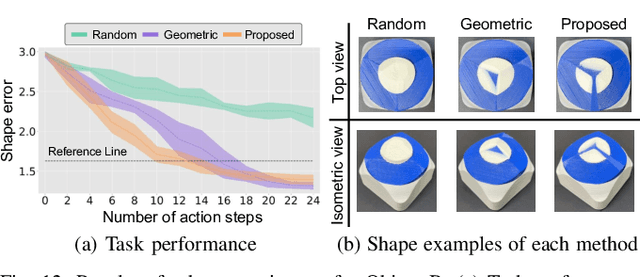
Object shaping by grinding is a crucial industrial process in which a rotating grinding belt removes material. Object-shape transition models are essential to achieving automation by robots; however, learning such a complex model that depends on process conditions is challenging because it requires a significant amount of data, and the irreversible nature of the removal process makes data collection expensive. This paper proposes a cutting-surface-aware Model-Based Reinforcement Learning (MBRL) method for robotic grinding. Our method employs a cutting-surface-aware model as the object's shape transition model, which in turn is composed of a geometric cutting model and a cutting-surface-deviation model, based on the assumption that the robot action can specify the cutting surface made by the tool. Furthermore, according to the grinding resistance theory, the cutting-surface-deviation model does not require raw shape information, making the model's dimensions smaller and easier to learn than a naive shape transition model directly mapping the shapes. Through evaluation and comparison by simulation and real robot experiments, we confirm that our MBRL method can achieve high data efficiency for learning object shaping by grinding and also provide generalization capability for initial and target shapes that differ from the training data.