 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn to Swim: Data-Driven LSTM Hydrodynamic Model for Quadruped Robot Gait Optimization
May 06, 2025



This paper presents a Long Short-Term Memory network-based Fluid Experiment Data-Driven model (FED-LSTM) for predicting unsteady, nonlinear hydrodynamic forces on the underwater quadruped robot we constructed. Trained on experimental data from leg force and body drag tests conducted in both a recirculating water tank and a towing tank, FED-LSTM outperforms traditional Empirical Formulas (EF) commonly used for flow prediction over flat surfaces. The model demonstrates superior accuracy and adaptability in capturing complex fluid dynamics, particularly in straight-line and turning-gait optimizations via the NSGA-II algorithm. FED-LSTM reduces deflection errors during straight-line swimming and improves turn times without increasing the turning radius. Hardware experiments further validate the model's precision and stability over EF. This approach provides a robust framework for enhancing the swimming performance of legged robots, laying the groundwork for future advances in underwater robotic locomotion.
Hindsight Generative Adversarial Imitation Learning
Mar 19, 2019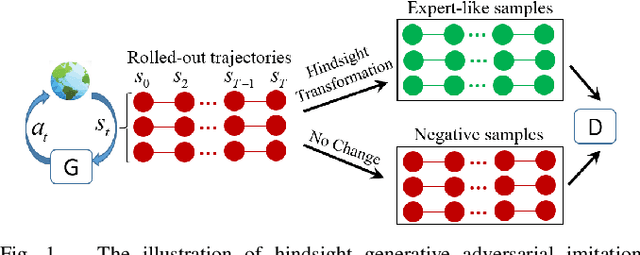
Compared to reinforcement learning, imitation learning (IL) is a powerful paradigm for training agents to learn control policies efficiently from expert demonstrations. However, in most cases, obtaining demonstration data is costly and laborious, which poses a significant challenge in some scenarios. A promising alternative is to train agent learning skills via imitation learning without expert demonstrations, which, to some extent, would extremely expand imitation learning areas. To achieve such expectation, in this paper, we propose Hindsight Generative Adversarial Imitation Learning (HGAIL) algorithm, with the aim of achieving imitation learning satisfying no need of demonstrations. Combining hindsight idea with the generative adversarial imitation learning (GAIL) framework, we realize implementing imitation learning successfully in cases of expert demonstration data are not available. Experiments show that the proposed method can train policies showing comparable performance to current imitation learning methods. Further more, HGAIL essentially endows curriculum learning mechanism which is critical for learning policies.