 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVibe Coding in Practice: Flow, Technical Debt, and Guidelines for Sustainable Use
Dec 11, 2025Vibe Coding (VC) is a form of software development assisted by generative AI, in which developers describe the intended functionality or logic via natural language prompts, and the AI system generates the corresponding source code. VC can be leveraged for rapid prototyping or developing the Minimum Viable Products (MVPs); however, it may introduce several risks throughout the software development life cycle. Based on our experience from several internally developed MVPs and a review of recent industry reports, this article analyzes the flow-debt tradeoffs associated with VC. The flow-debt trade-off arises when the seamless code generation occurs, leading to the accumulation of technical debt through architectural inconsistencies, security vulnerabilities, and increased maintenance overhead. These issues originate from process-level weaknesses, biases in model training data, a lack of explicit design rationale, and a tendency to prioritize quick code generation over human-driven iterative development. Based on our experiences, we identify and explain how current model, platform, and hardware limitations contribute to these issues, and propose countermeasures to address them, informing research and practice towards more sustainable VC approaches.
Engineering RAG Systems for Real-World Applications: Design, Development, and Evaluation
Jun 25, 2025Retrieval-Augmented Generation (RAG) systems are emerging as a key approach for grounding Large Language Models (LLMs) in external knowledge, addressing limitations in factual accuracy and contextual relevance. However, there is a lack of empirical studies that report on the development of RAG-based implementations grounded in real-world use cases, evaluated through general user involvement, and accompanied by systematic documentation of lessons learned. This paper presents five domain-specific RAG applications developed for real-world scenarios across governance, cybersecurity, agriculture, industrial research, and medical diagnostics. Each system incorporates multilingual OCR, semantic retrieval via vector embeddings, and domain-adapted LLMs, deployed through local servers or cloud APIs to meet distinct user needs. A web-based evaluation involving a total of 100 participants assessed the systems across six dimensions: (i) Ease of Use, (ii) Relevance, (iii) Transparency, (iv) Responsiveness, (v) Accuracy, and (vi) Likelihood of Recommendation. Based on user feedback and our development experience, we documented twelve key lessons learned, highlighting technical, operational, and ethical challenges affecting the reliability and usability of RAG systems in practice.
Automated Tomato Maturity Estimation Using an Optimized Residual Model with Pruning and Quantization Techniques
Mar 13, 2025Tomato maturity plays a pivotal role in optimizing harvest timing and ensuring product quality, but current methods struggle to achieve high accuracy along computational efficiency simultaneously. Existing deep learning approaches, while accurate, are often too computationally demanding for practical use in resource-constrained agricultural settings. In contrast, simpler techniques fail to capture the nuanced features needed for precise classification. This study aims to develop a computationally efficient tomato classification model using the ResNet-18 architecture optimized through transfer learning, pruning, and quantization techniques. Our objective is to address the dual challenge of maintaining high accuracy while enabling real-time performance on low-power edge devices. Then, these models were deployed on an edge device to investigate their performance for tomato maturity classification. The quantized model achieved an accuracy of 97.81%, with an average classification time of 0.000975 seconds per image. The pruned and auto-tuned model also demonstrated significant improvements in deployment metrics, further highlighting the benefits of optimization techniques. These results underscore the potential for a balanced solution that meets the accuracy and efficiency demands of modern agricultural production, paving the way for practical, real-world deployment in resource-limited environments.
Pretrained LLMs as Real-Time Controllers for Robot Operated Serial Production Line
Mar 05, 2025The manufacturing industry is undergoing a transformative shift, driven by cutting-edge technologies like 5G, AI, and cloud computing. Despite these advancements, effective system control, which is crucial for optimizing production efficiency, remains a complex challenge due to the intricate, knowledge-dependent nature of manufacturing processes and the reliance on domain-specific expertise. Conventional control methods often demand heavy customization, considerable computational resources, and lack transparency in decision-making. In this work, we investigate the feasibility of using Large Language Models (LLMs), particularly GPT-4, as a straightforward, adaptable solution for controlling manufacturing systems, specifically, mobile robot scheduling. We introduce an LLM-based control framework to assign mobile robots to different machines in robot assisted serial production lines, evaluating its performance in terms of system throughput. Our proposed framework outperforms traditional scheduling approaches such as First-Come-First-Served (FCFS), Shortest Processing Time (SPT), and Longest Processing Time (LPT). While it achieves performance that is on par with state-of-the-art methods like Multi-Agent Reinforcement Learning (MARL), it offers a distinct advantage by delivering comparable throughput without the need for extensive retraining. These results suggest that the proposed LLM-based solution is well-suited for scenarios where technical expertise, computational resources, and financial investment are limited, while decision transparency and system scalability are critical concerns.
LLM-Ehnanced Holonic Architecture for Ad-Hoc Scalable SoS
Jan 14, 2025



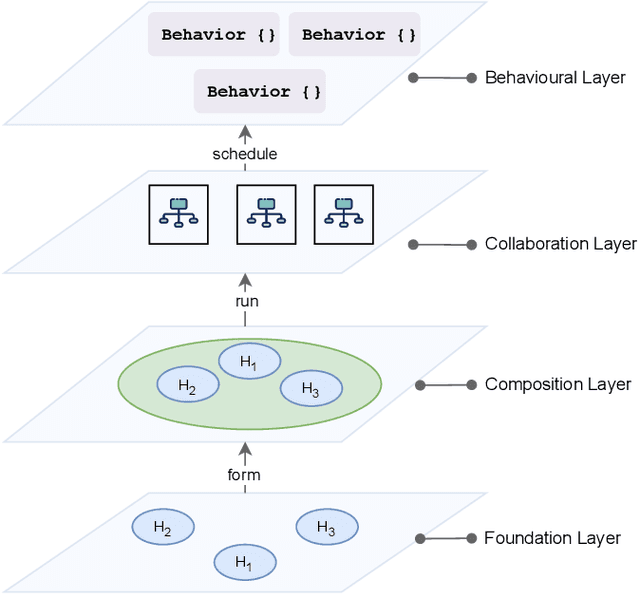
As modern system of systems (SoS) become increasingly adaptive and human centred, traditional architectures often struggle to support interoperability, reconfigurability, and effective human system interaction. This paper addresses these challenges by advancing the state of the art holonic architecture for SoS, offering two main contributions to support these adaptive needs. First, we propose a layered architecture for holons, which includes reasoning, communication, and capabilities layers. This design facilitates seamless interoperability among heterogeneous constituent systems by improving data exchange and integration. Second, inspired by principles of intelligent manufacturing, we introduce specialised holons namely, supervisor, planner, task, and resource holons aimed at enhancing the adaptability and reconfigurability of SoS. These specialised holons utilise large language models within their reasoning layers to support decision making and ensure real time adaptability. We demonstrate our approach through a 3D mobility case study focused on smart city transportation, showcasing its potential for managing complex, multimodal SoS environments. Additionally, we propose evaluation methods to assess the architecture efficiency and scalability,laying the groundwork for future empirical validations through simulations and real world implementations.
Holon Programming Model -- A Software-Defined Approach for System of Systems
Oct 23, 2024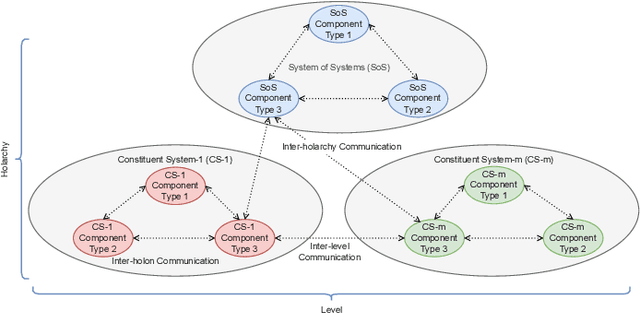
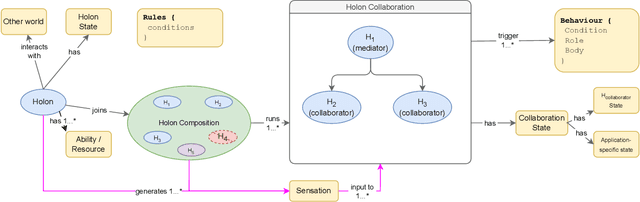
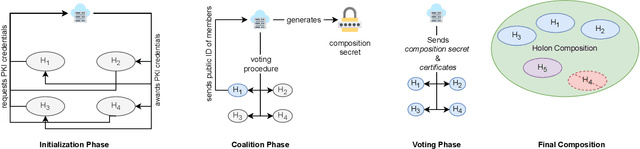
As Systems of Systems evolve into increasingly complex networks, harnessing their collective potential becomes paramount. Traditional SoS engineering approaches lack the necessary programmability to develop third party SoS level behaviors. To address this challenge, we propose a software defined approach to enable flexible and adaptive programming of SoS. We introduce the Holon Programming Model, a software-defined framework designed to meet these needs. The Holon Programming Model empowers developers to design and orchestrate complex system behaviors effectively, as illustrated in our disaster management scenario. This research outlines the Holon Programming Model theoretical underpinnings and practical applications, with the aim of driving further exploration and advancement in the field of software defined SoS
Towards Human-Bot Collaborative Software Architecting with ChatGPT
Feb 26, 2023



Architecting software-intensive systems can be a complex process. It deals with the daunting tasks of unifying stakeholders' perspectives, designers' intellect, tool-based automation, pattern-driven reuse, and so on, to sketch a blueprint that guides software implementation and evaluation. Despite its benefits, architecture-centric software engineering (ACSE) inherits a multitude of challenges. ACSE challenges could stem from a lack of standardized processes, socio-technical limitations, and scarcity of human expertise etc. that can impede the development of existing and emergent classes of software (e.g., IoTs, blockchain, quantum systems). Software Development Bots (DevBots) trained on large language models can help synergise architects' knowledge with artificially intelligent decision support to enable rapid architecting in a human-bot collaborative ACSE. An emerging solution to enable this collaboration is ChatGPT, a disruptive technology not primarily introduced for software engineering, but is capable of articulating and refining architectural artifacts based on natural language processing. We detail a case study that involves collaboration between a novice software architect and ChatGPT for architectural analysis, synthesis, and evaluation of a services-driven software application. Preliminary results indicate that ChatGPT can mimic an architect's role to support and often lead ACSE, however; it requires human oversight and decision support for collaborative architecting. Future research focuses on harnessing empirical evidence about architects' productivity and exploring socio-technical aspects of architecting with ChatGPT to tackle emerging and futuristic challenges of ACSE.
Ethics of AI: A Systematic Literature Review of Principles and Challenges
Sep 12, 2021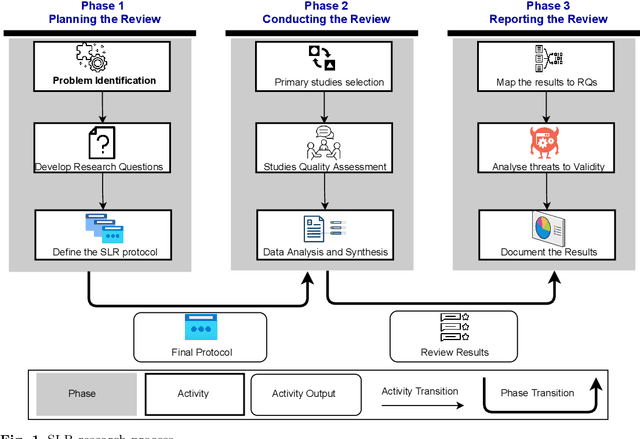
Ethics in AI becomes a global topic of interest for both policymakers and academic researchers. In the last few years, various research organizations, lawyers, think tankers and regulatory bodies get involved in developing AI ethics guidelines and principles. However, there is still debate about the implications of these principles. We conducted a systematic literature review (SLR) study to investigate the agreement on the significance of AI principles and identify the challenging factors that could negatively impact the adoption of AI ethics principles. The results reveal that the global convergence set consists of 22 ethical principles and 15 challenges. Transparency, privacy, accountability and fairness are identified as the most common AI ethics principles. Similarly, lack of ethical knowledge and vague principles are reported as the significant challenges for considering ethics in AI. The findings of this study are the preliminary inputs for proposing a maturity model that assess the ethical capabilities of AI systems and provide best practices for further improvements.