 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrban Air Mobility as a System of Systems: An LLM-Enhanced Holonic Approach
May 01, 2025Urban Air Mobility (UAM) is an emerging System of System (SoS) that faces challenges in system architecture, planning, task management, and execution. Traditional architectural approaches struggle with scalability, adaptability, and seamless resource integration within dynamic and complex environments. This paper presents an intelligent holonic architecture that incorporates Large Language Model (LLM) to manage the complexities of UAM. Holons function semi autonomously, allowing for real time coordination among air taxis, ground transport, and vertiports. LLMs process natural language inputs, generate adaptive plans, and manage disruptions such as weather changes or airspace closures.Through a case study of multimodal transportation with electric scooters and air taxis, we demonstrate how this architecture enables dynamic resource allocation, real time replanning, and autonomous adaptation without centralized control, creating more resilient and efficient urban transportation networks. By advancing decentralized control and AI driven adaptability, this work lays the groundwork for resilient, human centric UAM ecosystems, with future efforts targeting hybrid AI integration and real world validation.
Benchmarking LLM for Code Smells Detection: OpenAI GPT-4.0 vs DeepSeek-V3
Apr 22, 2025Determining the most effective Large Language Model for code smell detection presents a complex challenge. This study introduces a structured methodology and evaluation matrix to tackle this issue, leveraging a curated dataset of code samples consistently annotated with known smells. The dataset spans four prominent programming languages Java, Python, JavaScript, and C++; allowing for cross language comparison. We benchmark two state of the art LLMs, OpenAI GPT 4.0 and DeepSeek-V3, using precision, recall, and F1 score as evaluation metrics. Our analysis covers three levels of detail: overall performance, category level performance, and individual code smell type performance. Additionally, we explore cost effectiveness by comparing the token based detection approach of GPT 4.0 with the pattern-matching techniques employed by DeepSeek V3. The study also includes a cost analysis relative to traditional static analysis tools such as SonarQube. The findings offer valuable guidance for practitioners in selecting an efficient, cost effective solution for automated code smell detection
LLM-Ehnanced Holonic Architecture for Ad-Hoc Scalable SoS
Jan 14, 2025



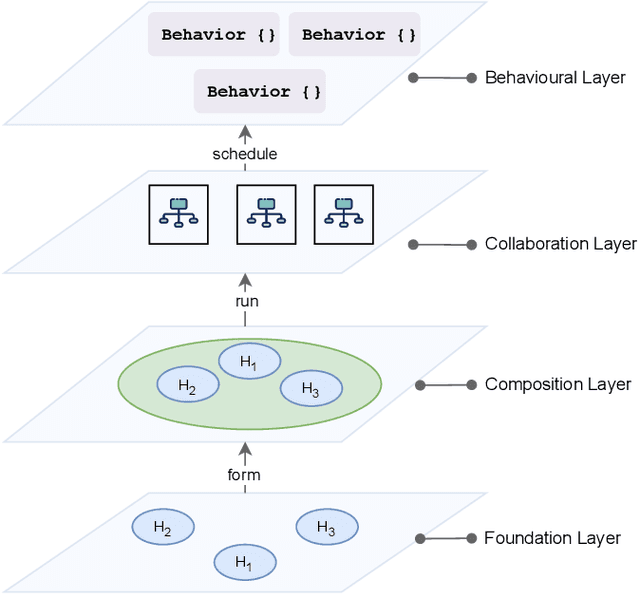
As modern system of systems (SoS) become increasingly adaptive and human centred, traditional architectures often struggle to support interoperability, reconfigurability, and effective human system interaction. This paper addresses these challenges by advancing the state of the art holonic architecture for SoS, offering two main contributions to support these adaptive needs. First, we propose a layered architecture for holons, which includes reasoning, communication, and capabilities layers. This design facilitates seamless interoperability among heterogeneous constituent systems by improving data exchange and integration. Second, inspired by principles of intelligent manufacturing, we introduce specialised holons namely, supervisor, planner, task, and resource holons aimed at enhancing the adaptability and reconfigurability of SoS. These specialised holons utilise large language models within their reasoning layers to support decision making and ensure real time adaptability. We demonstrate our approach through a 3D mobility case study focused on smart city transportation, showcasing its potential for managing complex, multimodal SoS environments. Additionally, we propose evaluation methods to assess the architecture efficiency and scalability,laying the groundwork for future empirical validations through simulations and real world implementations.
HyperGraphOS: A Meta Operating System for Science and Engineering
Dec 06, 2024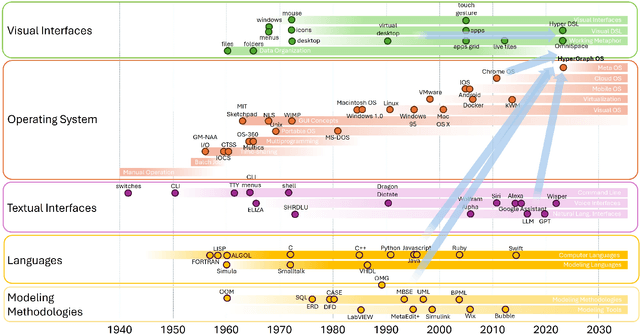
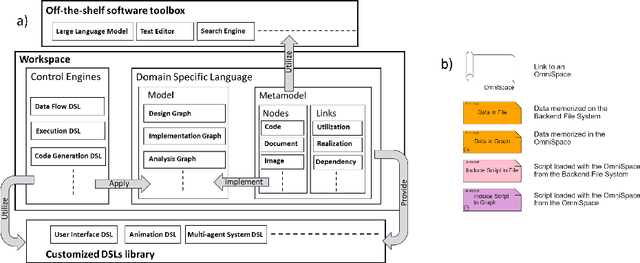
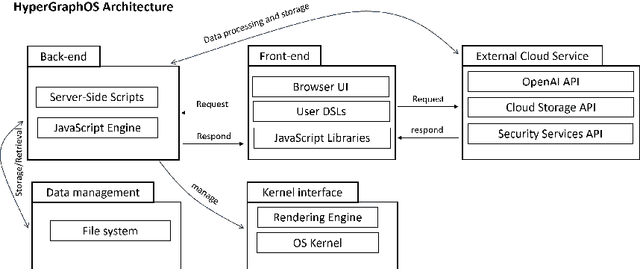
This paper presents HyperGraphOS, an innovative Operating System designed for the scientific and engineering domains. It combines model based engineering, graph modeling, data containers, and computational tools, offering users a dynamic workspace for creating and managing complex models represented as customizable graphs. Using a web based architecture, HyperGraphOS requires only a modern browser to organize knowledge, documents, and content into interconnected models. Domain Specific Languages drive workspace navigation, code generation, AI integration, and process organization.The platform models function as both visual drawings and data structures, enabling dynamic modifications and inspection, both interactively and programmatically. HyperGraphOS was evaluated across various domains, including virtual avatars, robotic task planning using Large Language Models, and meta modeling for feature based code development. Results show significant improvements in flexibility, data management, computation, and document handling.
Modeling and Simulation of a Multi Robot System Architecture
Nov 04, 2024



A Multi Robot System (MRS) is the infrastructure of an intelligent cyberphysical system, where the robots understand the need of the human, and hence cooperate together to fulfill this need. Modeling an MRS is a crucial aspect of designing the proper system architecture, because this model can be used to simulate and measure the performance of the proposed architecture. However, an MRS solution architecture modeling is a very difficult problem, as it contains many dependent behaviors that dynamically change due to the current status of the overall system. In this paper, we introduce a general purpose MRS case study, where the humans initiate requests that are achieved by the available robots. These requests require different plans that use the current capabilities of the available robots. After proposing an architecture that defines the solution components, three steps are followed. First is modeling these components via Business Process Model and Notation (BPMN) language. BPMN provides a graphical notation to precisely represent the behaviors of every component, which is an essential need to model the solution. Second is to simulate these components behaviors and interaction in form of software agents. Java Agent DEvelopment (JADE) middleware has been used to develop and simulate the proposed model. JADE is based on a reactive agent approach, therefore it can dynamically represent the interaction among the solution components. Finally is to analyze the performance of the solution by defining a number of quantitative measurements, which can be obtained while simulating the system model in JADE middleware, therefore the solution can be analyzed and compared to another architecture.
LLM as a code generator in Agile Model Driven Development
Oct 24, 2024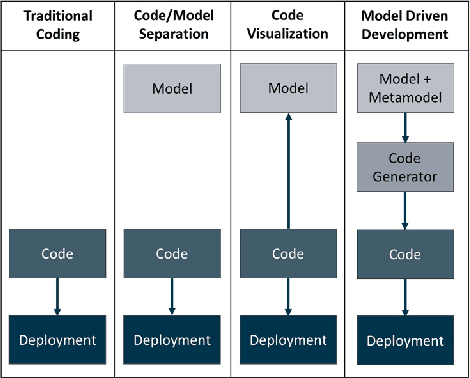
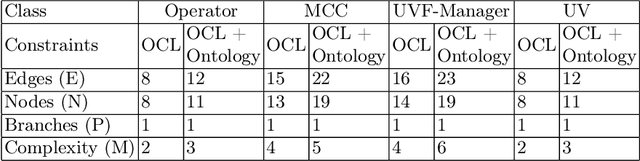
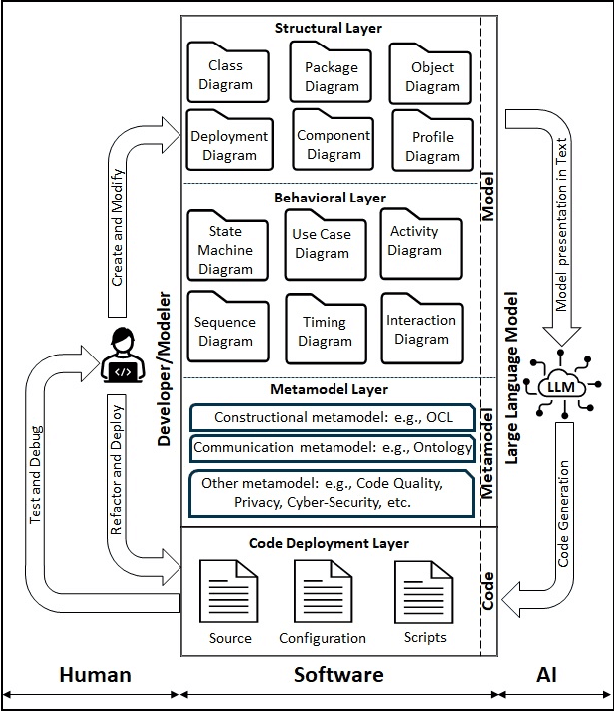
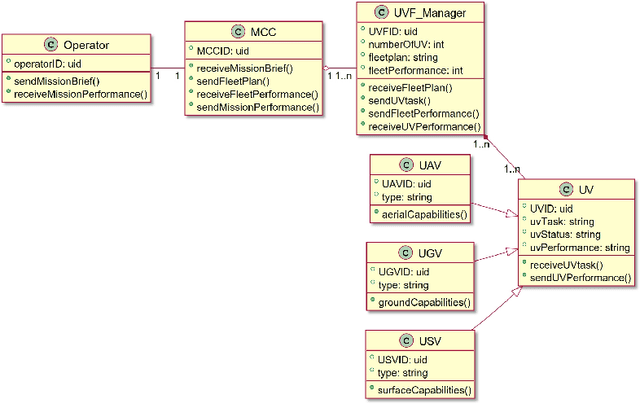
Leveraging Large Language Models (LLM) like GPT4 in the auto generation of code represents a significant advancement, yet it is not without its challenges. The ambiguity inherent in natural language descriptions of software poses substantial obstacles to generating deployable, structured artifacts. This research champions Model Driven Development (MDD) as a viable strategy to overcome these challenges, proposing an Agile Model Driven Development (AMDD) approach that employs GPT4 as a code generator. This approach enhances the flexibility and scalability of the code auto generation process and offers agility that allows seamless adaptation to changes in models or deployment environments. We illustrate this by modeling a multi agent Unmanned Vehicle Fleet (UVF) system using the Unified Modeling Language (UML), significantly reducing model ambiguity by integrating the Object Constraint Language (OCL) for code structure meta modeling, and the FIPA ontology language for communication semantics meta modeling. Applying GPT4 auto generation capabilities yields Java and Python code that is compatible with the JADE and PADE frameworks, respectively. Our thorough evaluation of the auto generated code verifies its alignment with expected behaviors and identifies enhancements in agent interactions. Structurally, we assessed the complexity of code derived from a model constrained solely by OCL meta models, against that influenced by both OCL and FIPA ontology meta models. The results indicate that the ontology constrained meta model produces inherently more complex code, yet its cyclomatic complexity remains within manageable levels, suggesting that additional meta model constraints can be incorporated without exceeding the high risk threshold for complexity.
Holon Programming Model -- A Software-Defined Approach for System of Systems
Oct 23, 2024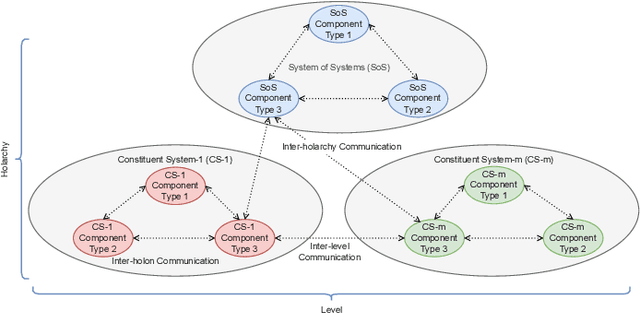
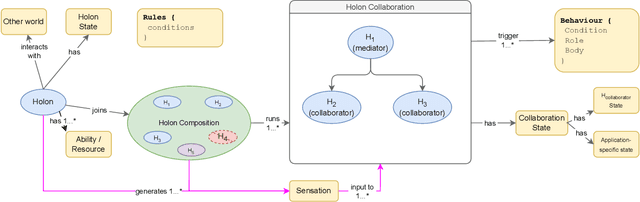
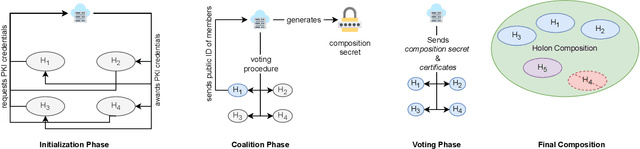
As Systems of Systems evolve into increasingly complex networks, harnessing their collective potential becomes paramount. Traditional SoS engineering approaches lack the necessary programmability to develop third party SoS level behaviors. To address this challenge, we propose a software defined approach to enable flexible and adaptive programming of SoS. We introduce the Holon Programming Model, a software-defined framework designed to meet these needs. The Holon Programming Model empowers developers to design and orchestrate complex system behaviors effectively, as illustrated in our disaster management scenario. This research outlines the Holon Programming Model theoretical underpinnings and practical applications, with the aim of driving further exploration and advancement in the field of software defined SoS
A self-adaptive system of systems architecture to enable its ad-hoc scalability: Unmanned Vehicle Fleet -- Mission Control Center Case study
Aug 01, 2024



A System of Systems (SoS) comprises Constituent Systems (CSs) that interact to provide unique capabilities beyond any single CS. A key challenge in SoS is ad-hoc scalability, meaning the system size changes during operation by adding or removing CSs. This research focuses on an Unmanned Vehicle Fleet (UVF) as a practical SoS example, addressing uncertainties like mission changes, range extensions, and UV failures. The proposed solution involves a self-adaptive system that dynamically adjusts UVF architecture, allowing the Mission Control Center (MCC) to scale UVF size automatically based on performance criteria or manually by operator decision. A multi-agent environment and rule management engine were implemented to simulate and verify this approach.
Multi-Robot System Architecture design in SysML and BPMN
Jul 26, 2024



Multi-Robot System (MRS) is a complex system that contains many different software and hardware components. This main problem addressed in this article is the MRS design complexity. The proposed solution provides a modular modeling and simulation technique that is based on formal system engineering method, therefore the MRS design complexity is decomposed and reduced. Modeling the MRS has been achieved via two formal Architecture Description Languages (ADLs), which are Systems Modeling Language (SysML) and Business Process Model and Notation (BPMN), to design the system blueprints. By using those abstract design ADLs, the implementation of the project becomes technology agnostic. This allows to transfer the design concept from on programming language to another. During the simulation phase, a multi-agent environment is used to simulate the MRS blueprints. The simulation has been implemented in Java Agent Development (JADE) middleware. Therefore, its results can be used to analysis and verify the proposed MRS model in form of performance evaluation matrix.
Worker Robot Cooperation and Integration into the Manufacturing Workcell via the Holonic Control Architecture
Mar 30, 2024



Worker-Robot Cooperation is a new industrial trend, which aims to sum the advantages of both the human and the industrial robot to afford a new intelligent manufacturing techniques. The cooperative manufacturing between the worker and the robot contains other elements such as the product parts and the manufacturing tools. All these production elements must cooperate in one manufacturing workcell to fulfill the production requirements. The manufacturing control system is the mean to connect all these cooperative elements together in one body. This manufacturing control system is distributed and autonomous due to the nature of the cooperative workcell. Accordingly, this article proposes the holonic control architecture as the manufacturing concept of the cooperative workcell. Furthermore, the article focuses on the feasibility of this manufacturing concept, by applying it over a case study that involves the cooperation between a dual-arm robot and a worker. During this case study, the worker uses a variety of hand gestures to cooperate with the robot to achieve the highest production flexibility