 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperGraphOS: A Meta Operating System for Science and Engineering
Dec 06, 2024
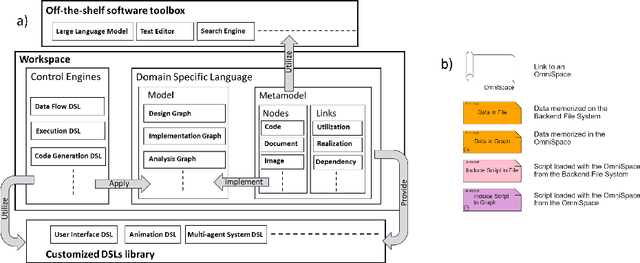
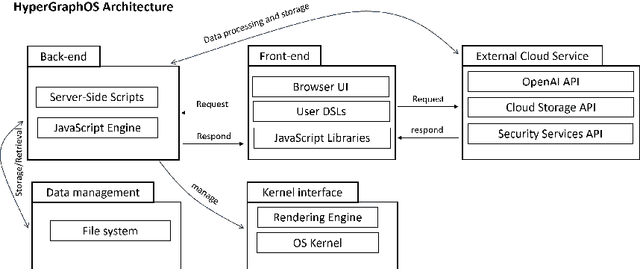
This paper presents HyperGraphOS, an innovative Operating System designed for the scientific and engineering domains. It combines model based engineering, graph modeling, data containers, and computational tools, offering users a dynamic workspace for creating and managing complex models represented as customizable graphs. Using a web based architecture, HyperGraphOS requires only a modern browser to organize knowledge, documents, and content into interconnected models. Domain Specific Languages drive workspace navigation, code generation, AI integration, and process organization.The platform models function as both visual drawings and data structures, enabling dynamic modifications and inspection, both interactively and programmatically. HyperGraphOS was evaluated across various domains, including virtual avatars, robotic task planning using Large Language Models, and meta modeling for feature based code development. Results show significant improvements in flexibility, data management, computation, and document handling.
A self-adaptive system of systems architecture to enable its ad-hoc scalability: Unmanned Vehicle Fleet -- Mission Control Center Case study
Aug 01, 2024



A System of Systems (SoS) comprises Constituent Systems (CSs) that interact to provide unique capabilities beyond any single CS. A key challenge in SoS is ad-hoc scalability, meaning the system size changes during operation by adding or removing CSs. This research focuses on an Unmanned Vehicle Fleet (UVF) as a practical SoS example, addressing uncertainties like mission changes, range extensions, and UV failures. The proposed solution involves a self-adaptive system that dynamically adjusts UVF architecture, allowing the Mission Control Center (MCC) to scale UVF size automatically based on performance criteria or manually by operator decision. A multi-agent environment and rule management engine were implemented to simulate and verify this approach.