 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Vertical Look at UAV Connectivity in the Wild: Cellular vs. Starlink, 3D Characterization, and Performance Prediction
May 28, 2026In this paper, we present an open-source measurement platform designed to characterize the performance of commercial cellular (Verizon, a major US provider) and LEO satellite (Starlink) networks through real-world flight tests in rural environments. We implement a comprehensive multi-layer measurement approach spanning physical layer signal metrics, multi-cell network topology, and end-to-end (E2E) application performance. Through an extensive flight campaign with more than $10$ flight tests, $4.5$+ hours of flight time resulting in more than $18$K samples, we present the first detailed, open-source dataset analyzing dual cellular and Starlink performance for low-altitude UAV operations. Our cellular-Starlink comparative results, which are collected \emph{simultaneously at the same time and location}, demonstrate significant performance differences between the two technologies: the LEO satellite link achieves superior latency performance with $95\%$ of Round-Trip Time (RTT) measurements below $50$ ms compared to $80\%$ under $150$ ms for cellular, and exceptional downlink capacity with $95\%$ exceeding $25$ Mbps versus only $5$ Mbps for cellular. Our analysis on cellular network performance demonstrates that while higher altitudes (e.g., $330+$ m above the sea level) improve signal power by $15-20$ dB via line-of-sight (LOS) propagation, it causes a $3-4$ $\times$ increase in handover rates, which is due to excessive multi-cell visibility rather than signal degradation. Furthermore, we observe asymmetric impacts on the RTT performance due to handovers such that $53.5$\% of handovers improve RTT, but worst-case degradation ($275$ ms) is $2$ $\times$ larger than best-case improvement ($137$ ms).
A Preliminary Assessment of Midhaul Links at 140 GHz using Ray-Tracing
May 26, 2026The ever-growing demand for mobile data necessitates a transport network architecture that can withstand the 5G-and-beyond multi-Gbps traffic requirements. To cater for such unprecedented demand, studies are being conducted to incorporate TeraHertz (THz) communications in future mobile networks. In this paper, we consider an urban environment and evaluate the feasibility of THz wireless midhaul links for the transport networks between the Central Units (CU) and Distributed Units (DU) in a disaggregated 5G network architecture with functional splits. Our goal is to study the feasibility of midhaul links at 140 GHz by minimizing the number of required CUs to serve all the DUs. To this end, we define several policies for selecting CU and DU nodes in order to determine the peak data rate that can be supported over each link between a CU and DU. Our numerical results based on ray-tracing suggest that wireless links at 140 GHz with 3GPP option 2 as High Layer Split (HLS) represents a promising technology for midhaul transport networks.
ElasticVR: Elastic Task Computing in Multi-User Multi-Connectivity Wireless Virtual Reality (VR) Systems
Dec 13, 2025Diverse emerging VR applications integrate streaming of high fidelity 360 video content that requires ample amounts of computation and data rate. Scalable 360 video tiling enables having elastic VR computational tasks that can be scaled adaptively in computation and data rate based on the available user and system resources. We integrate scalable 360 video tiling in an edge-client wireless multi-connectivity architecture for joint elastic task computation offloading across multiple VR users called ElasticVR. To balance the trade-offs in communication, computation, energy consumption, and QoE that arise herein, we formulate a constrained QoE and energy optimization problem that integrates the multi-user/multi-connectivity action space with the elasticity of VR computational tasks. The ElasticVR framework introduces two multi-agent deep reinforcement learning solutions, namely CPPG and IPPG. CPPG adopts a centralized training and centralized execution approach to capture the coupling between users' communication and computational demands. This leads to globally coordinated decisions at the cost of increased computational overheads and limited scalability. To address the latter challenges, we also explore an alternative strategy denoted IPPG that adopts a centralized training with decentralized execution paradigm. IPPG leverages shared information and parameter sharing to learn robust policies; however, during execution, each user takes action independently based on its local state information only. The decentralized execution alleviates the communication and computation overhead of centralized decision-making and improves scalability. We show that the ElasticVR framework improves the PSNR by 43.21%, while reducing the response time and energy consumption by 42.35% and 56.83%, respectively, compared with a case where no elasticity is incorporated into VR computations.
Privacy-Preserving Quantized Federated Learning with Diverse Precision
Jul 01, 2025



Federated learning (FL) has emerged as a promising paradigm for distributed machine learning, enabling collaborative training of a global model across multiple local devices without requiring them to share raw data. Despite its advancements, FL is limited by factors such as: (i) privacy risks arising from the unprotected transmission of local model updates to the fusion center (FC) and (ii) decreased learning utility caused by heterogeneity in model quantization resolution across participating devices. Prior work typically addresses only one of these challenges because maintaining learning utility under both privacy risks and quantization heterogeneity is a non-trivial task. In this paper, our aim is therefore to improve the learning utility of a privacy-preserving FL that allows clusters of devices with different quantization resolutions to participate in each FL round. Specifically, we introduce a novel stochastic quantizer (SQ) that is designed to simultaneously achieve differential privacy (DP) and minimum quantization error. Notably, the proposed SQ guarantees bounded distortion, unlike other DP approaches. To address quantization heterogeneity, we introduce a cluster size optimization technique combined with a linear fusion approach to enhance model aggregation accuracy. Numerical simulations validate the benefits of our approach in terms of privacy protection and learning utility compared to the conventional LaplaceSQ-FL algorithm.
Optimizing NOMA Transmissions to Advance Federated Learning in Vehicular Networks
Aug 06, 2024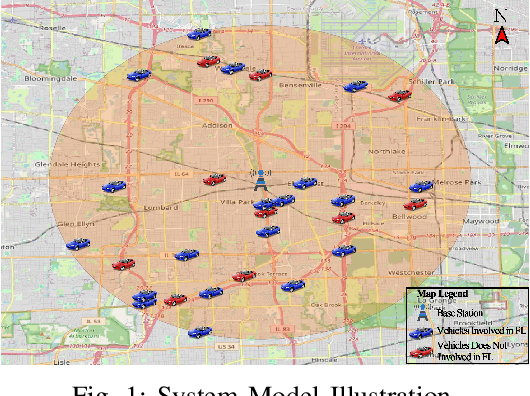
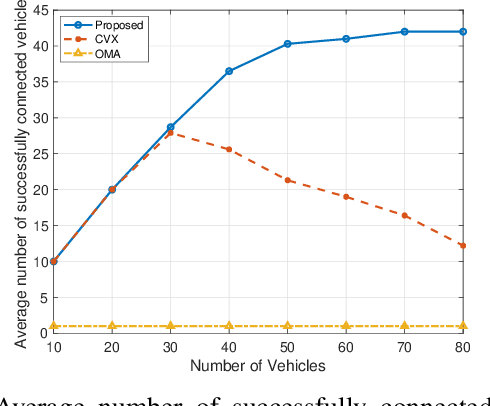
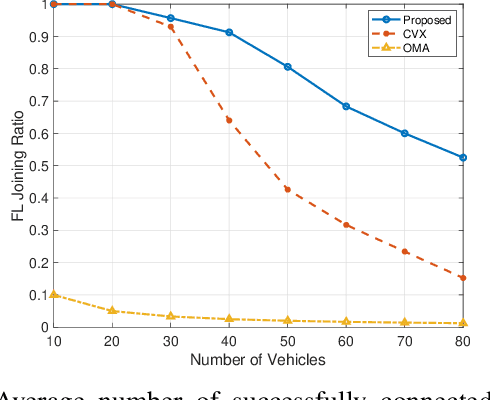
Diverse critical data, such as location information and driving patterns, can be collected by IoT devices in vehicular networks to improve driving experiences and road safety. However, drivers are often reluctant to share their data due to privacy concerns. The Federated Vehicular Network (FVN) is a promising technology that tackles these concerns by transmitting model parameters instead of raw data, thereby protecting the privacy of drivers. Nevertheless, the performance of Federated Learning (FL) in a vehicular network depends on the joining ratio, which is restricted by the limited available wireless resources. To address these challenges, this paper proposes to apply Non-Orthogonal Multiple Access (NOMA) to improve the joining ratio in a FVN. Specifically, a vehicle selection and transmission power control algorithm is developed to exploit the power domain differences in the received signal to ensure the maximum number of vehicles capable of joining the FVN. Our simulation results demonstrate that the proposed NOMA-based strategy increases the joining ratio and significantly enhances the performance of the FVN.
Multi-Task Decision-Making for Multi-User 360 Video Processing over Wireless Networks
Jul 03, 2024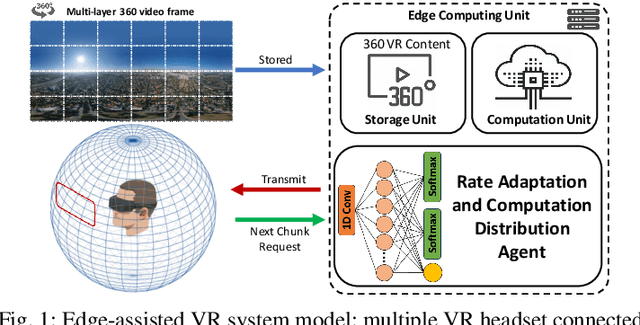
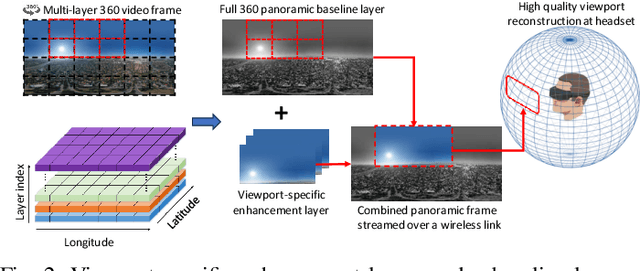
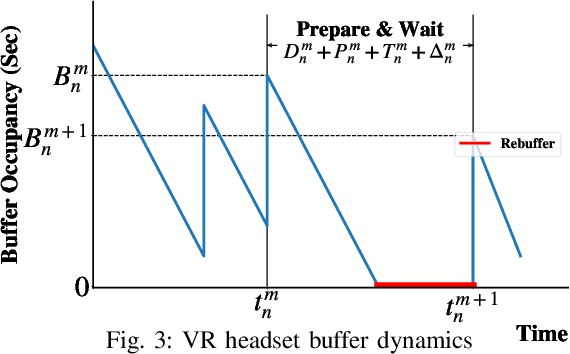
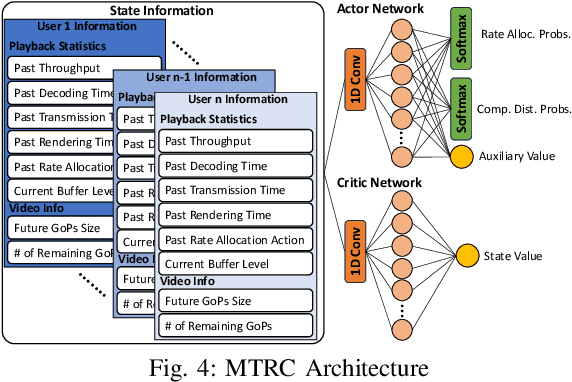
We study a multi-task decision-making problem for 360 video processing in a wireless multi-user virtual reality (VR) system that includes an edge computing unit (ECU) to deliver 360 videos to VR users and offer computing assistance for decoding/rendering of video frames. However, this comes at the expense of increased data volume and required bandwidth. To balance this trade-off, we formulate a constrained quality of experience (QoE) maximization problem in which the rebuffering time and quality variation between video frames are bounded by user and video requirements. To solve the formulated multi-user QoE maximization, we leverage deep reinforcement learning (DRL) for multi-task rate adaptation and computation distribution (MTRC). The proposed MTRC approach does not rely on any predefined assumption about the environment and relies on video playback statistics (i.e., past throughput, decoding time, transmission time, etc.), video information, and the resulting performance to adjust the video bitrate and computation distribution. We train MTRC with real-world wireless network traces and 360 video datasets to obtain evaluation results in terms of the average QoE, peak signal-to-noise ratio (PSNR), rebuffering time, and quality variation. Our results indicate that the MTRC improves the users' QoE compared to state-of-the-art rate adaptation algorithm. Specifically, we show a 5.97 dB to 6.44 dB improvement in PSNR, a 1.66X to 4.23X improvement in rebuffering time, and a 4.21 dB to 4.35 dB improvement in quality variation.
Federated Learning-based Collaborative Wideband Spectrum Sensing and Scheduling for UAVs in UTM Systems
Jun 03, 2024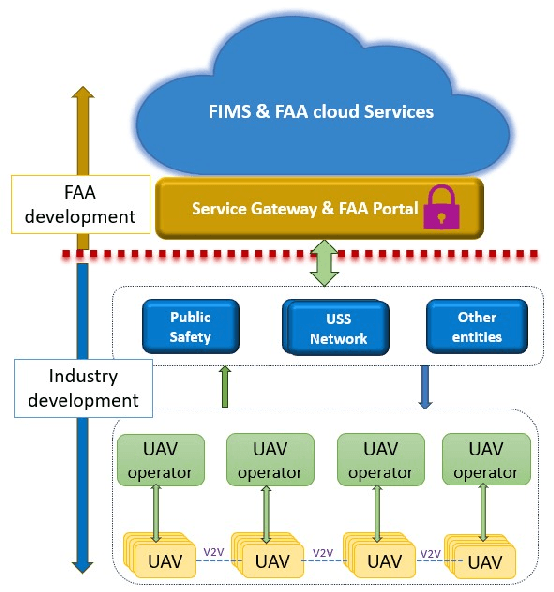
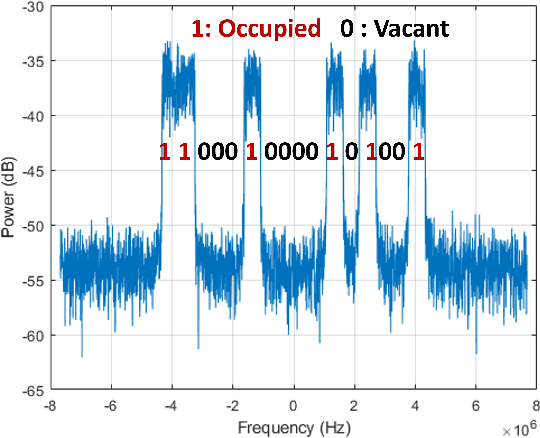
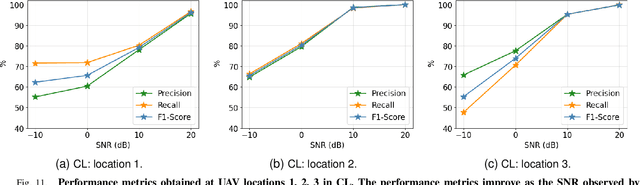
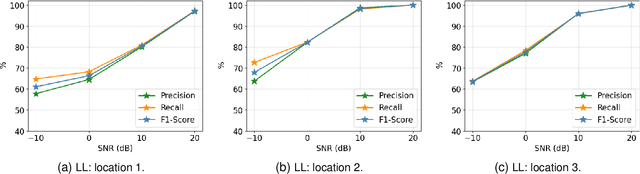
In this paper, we propose a data-driven framework for collaborative wideband spectrum sensing and scheduling for networked unmanned aerial vehicles (UAVs), which act as the secondary users (SUs) to opportunistically utilize detected "spectrum holes". Our overall framework consists of three main stages. Firstly, in the model training stage, we explore dataset generation in a multi-cell environment and training a machine learning (ML) model using the federated learning (FL) architecture. Unlike the existing studies on FL for wireless that presume datasets are readily available for training, we propose a novel architecture that directly integrates wireless dataset generation, which involves capturing I/Q samples from over-the-air signals in a multi-cell environment, into the FL training process. Secondly, in the collaborative spectrum inference stage, we propose a collaborative spectrum fusion strategy that is compatible with the unmanned aircraft system traffic management (UTM) ecosystem. Finally, in the spectrum scheduling stage, we leverage reinforcement learning (RL) solutions to dynamically allocate the detected spectrum holes to the secondary users. To evaluate the proposed methods, we establish a comprehensive simulation framework that generates a near-realistic synthetic dataset using MATLAB LTE toolbox by incorporating base-station~(BS) locations in a chosen area of interest, performing ray-tracing, and emulating the primary users channel usage in terms of I/Q samples. This evaluation methodology provides a flexible framework to generate large spectrum datasets that could be used for developing ML/AI-based spectrum management solutions for aerial devices.
Centralized vs. Decentralized Multi-Agent Reinforcement Learning for Enhanced Control of Electric Vehicle Charging Networks
Apr 18, 2024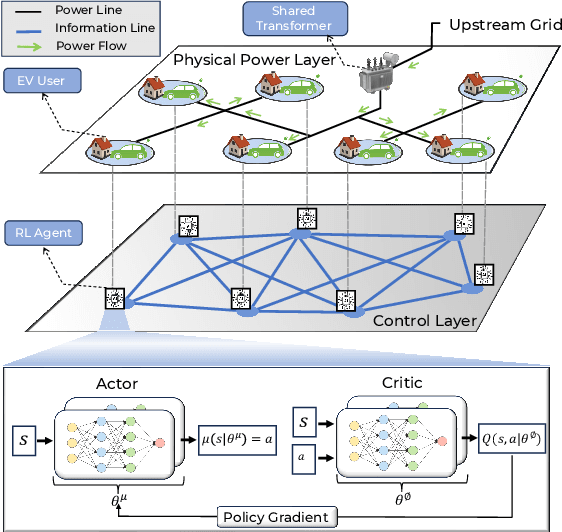
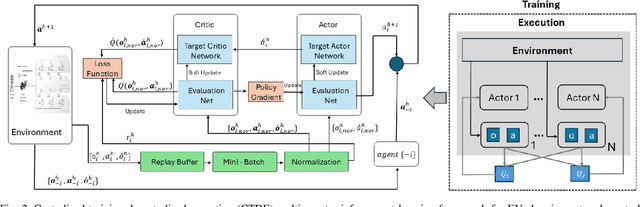
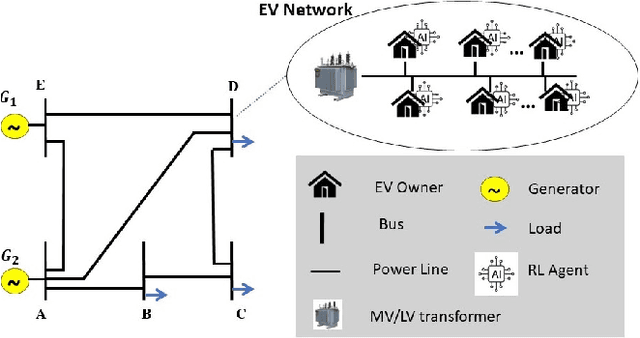
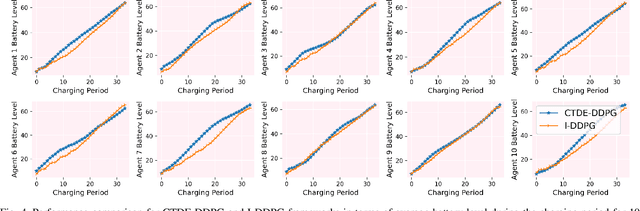
The widespread adoption of electric vehicles (EVs) poses several challenges to power distribution networks and smart grid infrastructure due to the possibility of significantly increasing electricity demands, especially during peak hours. Furthermore, when EVs participate in demand-side management programs, charging expenses can be reduced by using optimal charging control policies that fully utilize real-time pricing schemes. However, devising optimal charging methods and control strategies for EVs is challenging due to various stochastic and uncertain environmental factors. Currently, most EV charging controllers operate based on a centralized model. In this paper, we introduce a novel approach for distributed and cooperative charging strategy using a Multi-Agent Reinforcement Learning (MARL) framework. Our method is built upon the Deep Deterministic Policy Gradient (DDPG) algorithm for a group of EVs in a residential community, where all EVs are connected to a shared transformer. This method, referred to as CTDE-DDPG, adopts a Centralized Training Decentralized Execution (CTDE) approach to establish cooperation between agents during the training phase, while ensuring a distributed and privacy-preserving operation during execution. We theoretically examine the performance of centralized and decentralized critics for the DDPG-based MARL implementation and demonstrate their trade-offs. Furthermore, we numerically explore the efficiency, scalability, and performance of centralized and decentralized critics. Our theoretical and numerical results indicate that, despite higher policy gradient variances and training complexity, the CTDE-DDPG framework significantly improves charging efficiency by reducing total variation by approximately %36 and charging cost by around %9.1 on average...
Semantic-Aware and Goal-Oriented Communications for Object Detection in Wireless End-to-End Image Transmission
Feb 01, 2024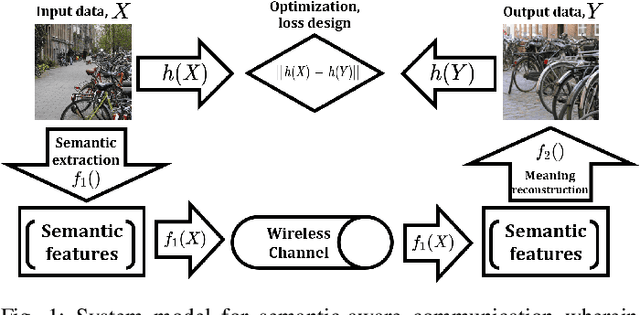
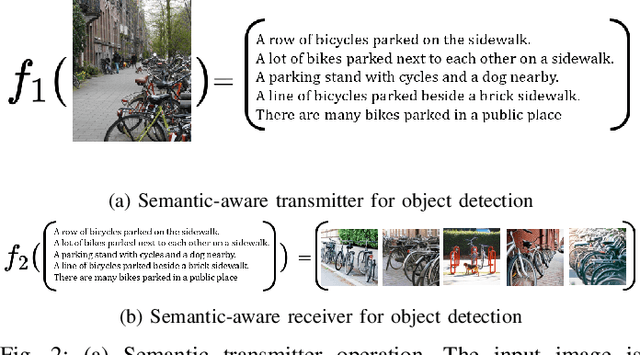
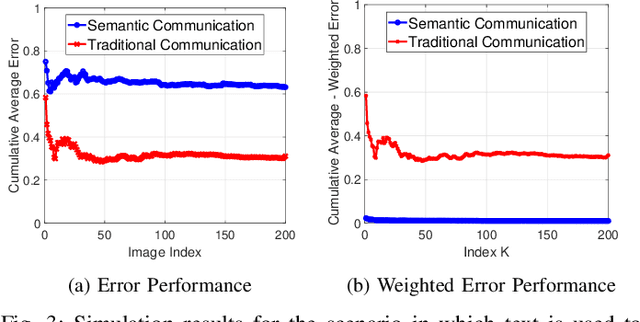
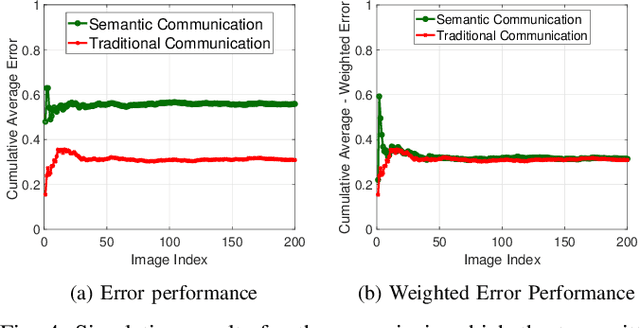
Semantic communication is focused on optimizing the exchange of information by transmitting only the most relevant data required to convey the intended message to the receiver and achieve the desired communication goal. For example, if we consider images as the information and the goal of the communication is object detection at the receiver side, the semantic of information would be the objects in each image. Therefore, by only transferring the semantics of images we can achieve the communication goal. In this paper, we propose a design framework for implementing semantic-aware and goal-oriented communication of images. To achieve this, we first define the baseline problem as a set of mathematical problems that can be optimized to improve the efficiency and effectiveness of the communication system. We consider two scenarios in which either the data rate or the error at the receiver is the limiting constraint. Our proposed system model and solution is inspired by the concept of auto-encoders, where the encoder and the decoder are respectively implemented at the transmitter and receiver to extract semantic information for specific object detection goals. Our numerical results validate the proposed design framework to achieve low error or near-optimal in a goal-oriented communication system while reducing the amount of data transfers.
Efficient Cluster Selection for Personalized Federated Learning: A Multi-Armed Bandit Approach
Oct 29, 2023
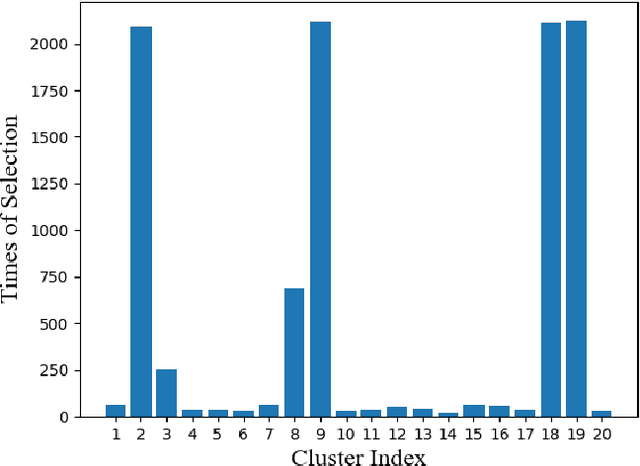

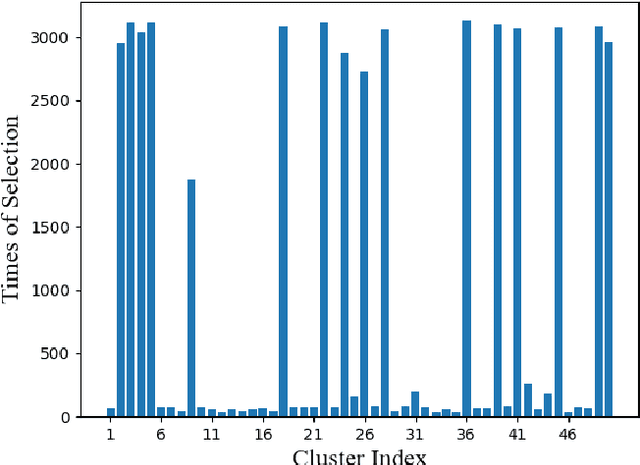
Federated learning (FL) offers a decentralized training approach for machine learning models, prioritizing data privacy. However, the inherent heterogeneity in FL networks, arising from variations in data distribution, size, and device capabilities, poses challenges in user federation. Recognizing this, Personalized Federated Learning (PFL) emphasizes tailoring learning processes to individual data profiles. In this paper, we address the complexity of clustering users in PFL, especially in dynamic networks, by introducing a dynamic Upper Confidence Bound (dUCB) algorithm inspired by the multi-armed bandit (MAB) approach. The dUCB algorithm ensures that new users can effectively find the best cluster for their data distribution by balancing exploration and exploitation. The performance of our algorithm is evaluated in various cases, showing its effectiveness in handling dynamic federated learning scenarios.