 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Structured Review of Underwater Object Detection Challenges and Solutions: From Traditional to Large Vision Language Models
Sep 10, 2025Underwater object detection (UOD) is vital to diverse marine applications, including oceanographic research, underwater robotics, and marine conservation. However, UOD faces numerous challenges that compromise its performance. Over the years, various methods have been proposed to address these issues, but they often fail to fully capture the complexities of underwater environments. This review systematically categorizes UOD challenges into five key areas: Image quality degradation, target-related issues, data-related challenges, computational and processing constraints, and limitations in detection methodologies. To address these challenges, we analyze the progression from traditional image processing and object detection techniques to modern approaches. Additionally, we explore the potential of large vision-language models (LVLMs) in UOD, leveraging their multi-modal capabilities demonstrated in other domains. We also present case studies, including synthetic dataset generation using DALL-E 3 and fine-tuning Florence-2 LVLM for UOD. This review identifies three key insights: (i) Current UOD methods are insufficient to fully address challenges like image degradation and small object detection in dynamic underwater environments. (ii) Synthetic data generation using LVLMs shows potential for augmenting datasets but requires further refinement to ensure realism and applicability. (iii) LVLMs hold significant promise for UOD, but their real-time application remains under-explored, requiring further research on optimization techniques.
Optimizing NOMA Transmissions to Advance Federated Learning in Vehicular Networks
Aug 06, 2024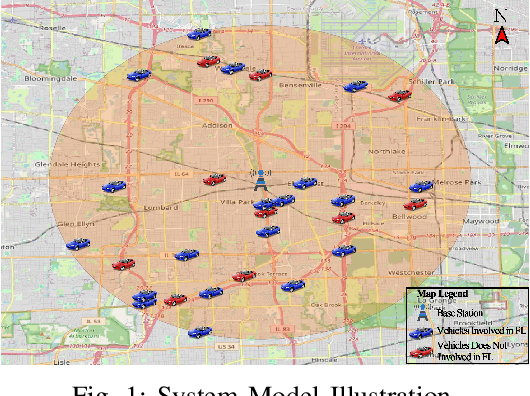
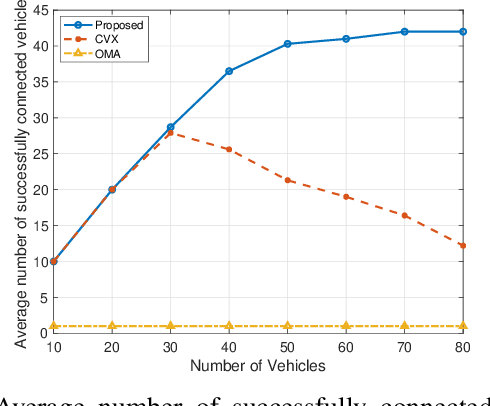
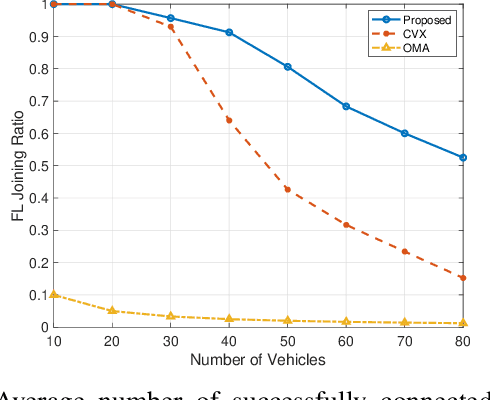
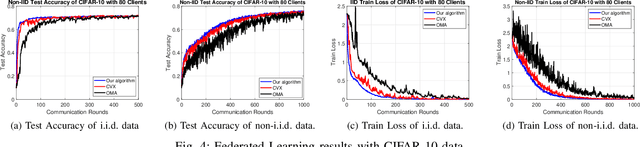
Diverse critical data, such as location information and driving patterns, can be collected by IoT devices in vehicular networks to improve driving experiences and road safety. However, drivers are often reluctant to share their data due to privacy concerns. The Federated Vehicular Network (FVN) is a promising technology that tackles these concerns by transmitting model parameters instead of raw data, thereby protecting the privacy of drivers. Nevertheless, the performance of Federated Learning (FL) in a vehicular network depends on the joining ratio, which is restricted by the limited available wireless resources. To address these challenges, this paper proposes to apply Non-Orthogonal Multiple Access (NOMA) to improve the joining ratio in a FVN. Specifically, a vehicle selection and transmission power control algorithm is developed to exploit the power domain differences in the received signal to ensure the maximum number of vehicles capable of joining the FVN. Our simulation results demonstrate that the proposed NOMA-based strategy increases the joining ratio and significantly enhances the performance of the FVN.
Efficient Cluster Selection for Personalized Federated Learning: A Multi-Armed Bandit Approach
Oct 29, 2023
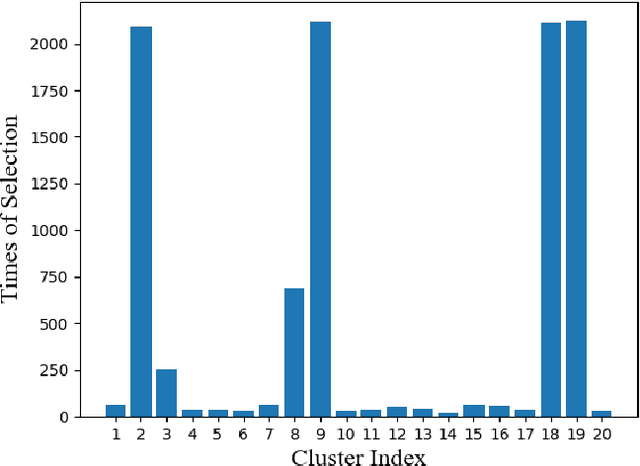

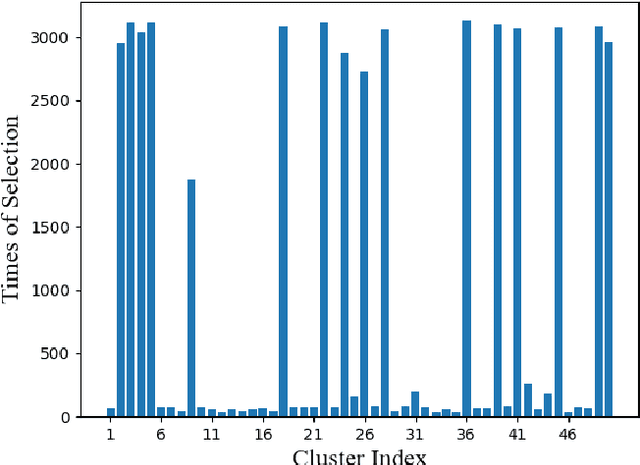
Federated learning (FL) offers a decentralized training approach for machine learning models, prioritizing data privacy. However, the inherent heterogeneity in FL networks, arising from variations in data distribution, size, and device capabilities, poses challenges in user federation. Recognizing this, Personalized Federated Learning (PFL) emphasizes tailoring learning processes to individual data profiles. In this paper, we address the complexity of clustering users in PFL, especially in dynamic networks, by introducing a dynamic Upper Confidence Bound (dUCB) algorithm inspired by the multi-armed bandit (MAB) approach. The dUCB algorithm ensures that new users can effectively find the best cluster for their data distribution by balancing exploration and exploitation. The performance of our algorithm is evaluated in various cases, showing its effectiveness in handling dynamic federated learning scenarios.