 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-design Optimization of Moving Parts for Compliance and Collision Avoidance
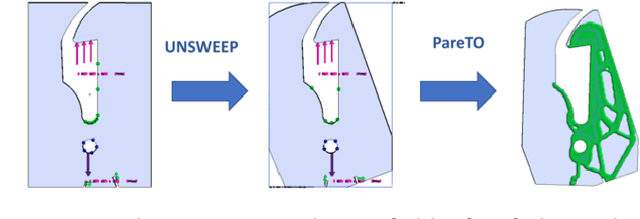
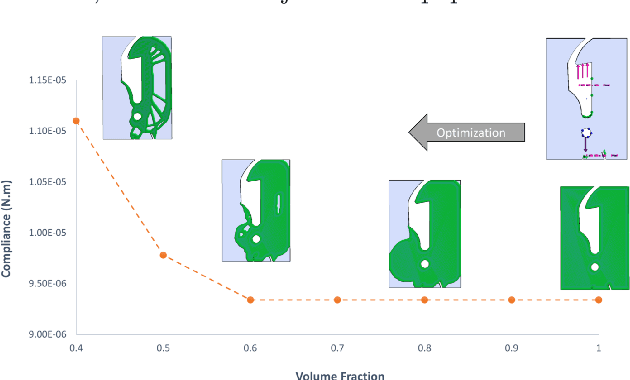
Mar 31, 2025Design requirements for moving parts in mechanical assemblies are typically specified in terms of interactions with other parts. Some are purely kinematic (e.g., pairwise collision avoidance) while others depend on physics and material properties (e.g., deformation under loads). Kinematic design methods and physics-based shape/topology optimization (SO/TO) deal separately with these requirements. They rarely talk to each other as the former uses set algebra and group theory while the latter requires discretizing and solving differential equations. Hence, optimizing a moving part based on physics typically relies on either neglecting or pruning kinematic constraints in advance, e.g., by restricting the design domain to a collision-free space using an unsweep operation. In this paper, we show that TO can be used to co-design two or more parts in relative motion to simultaneously satisfy physics-based criteria and collision avoidance. We restrict our attention to maximizing linear-elastic stiffness while penalizing collision measures aggregated in time. We couple the TO loops for two parts in relative motion so that the evolution of each part's shape is accounted for when penalizing collision for the other part. The collision measures are computed by a correlation functional that can be discretized by left- and right-multiplying the shape design variables by a pre-computed matrix that depends solely on the motion. This decoupling is key to making the computations scalable for TO iterations. We demonstrate the effectiveness of the approach with 2D and 3D examples.
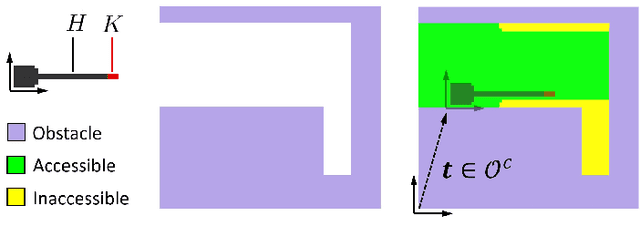
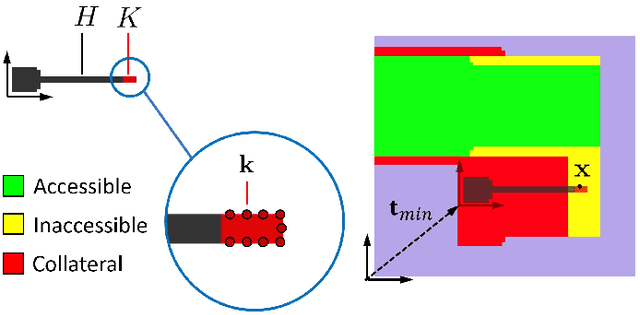
Deep Neural Implicit Representation of Accessibility for Multi-Axis Manufacturing
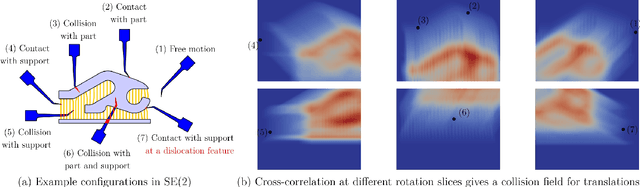
Aug 30, 2024One of the main concerns in design and process planning for multi-axis additive and subtractive manufacturing is collision avoidance between moving objects (e.g., tool assemblies) and stationary objects (e.g., a part unified with fixtures). The collision measure for various pairs of relative rigid translations and rotations between the two pointsets can be conceptualized by a compactly supported scalar field over the 6D non-Euclidean configuration space. Explicit representation and computation of this field is costly in both time and space. If we fix $O(m)$ sparsely sampled rotations (e.g., tool orientations), computation of the collision measure field as a convolution of indicator functions of the 3D pointsets over a uniform grid (i.e., voxelized geometry) of resolution $O(n^3)$ via fast Fourier transforms (FFTs) scales as in $O(mn^3 \log n)$ in time and $O(mn^3)$ in space. In this paper, we develop an implicit representation of the collision measure field via deep neural networks (DNNs). We show that our approach is able to accurately interpolate the collision measure from a sparse sampling of rotations, and can represent the collision measure field with a small memory footprint. Moreover, we show that this representation can be efficiently updated through fine-tuning to more efficiently train the network on multi-resolution data, as well as accommodate incremental changes to the geometry (such as might occur in iterative processes such as topology optimization of the part subject to CNC tool accessibility constraints).
* Special Issue on symposium on Solid and Physical Modeling (SPM 2023)
Hybrid Manufacturing Process Planning for Arbitrary Part and Tool Shapes
May 24, 2022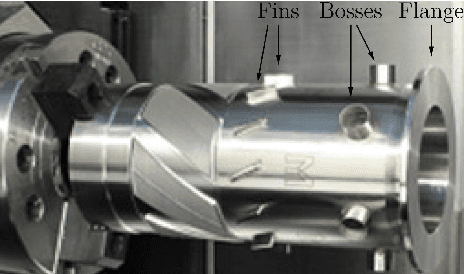

Hybrid manufacturing (HM) technologies combine additive and subtractive manufacturing (AM/SM) capabilities in multi-modal process plans that leverage the strengths of each. Despite the growing interest in HM technologies, software tools for process planning have not caught up with advances in hardware and typically impose restrictions that limit the design and manufacturing engineers' ability to systematically explore the full design and process planning spaces. We present a general framework for identifying AM/SM actions that make up an HM process plan based on accessibility and support requirements, using morphological operations that allow for arbitrary part and tool geometries to be considered. To take advantage of multi-modality, we define the actions to allow for temporary excessive material deposition or removal, with an understanding that subsequent actions can correct for them, unlike the case in unimodal (AM-only or SM-only) process plans that are monotonic. We use this framework to generate a combinatorial space of valid, potentially non-monotonic, process plans for a given part of arbitrary shape, a collection of AM/SM tools of arbitrary shapes, and a set of relative rotations (fixed for each action) between them, representing build/fixturing directions on $3-$axis machines. Finally, we use define a simple objective function quantifying the cost of materials and operating time in terms of deposition/removal volumes and use a search algorithm to explore the exponentially large space of valid process plans to find "cost-optimal" solutions. We demonstrate the effectiveness of our method on 3D examples.
* Special Issue on symposium on Solid and Physical Modeling (SPM'2022)
FRC-TOuNN: Topology Optimization of Continuous Fiber Reinforced Composites using Neural Network
May 07, 2022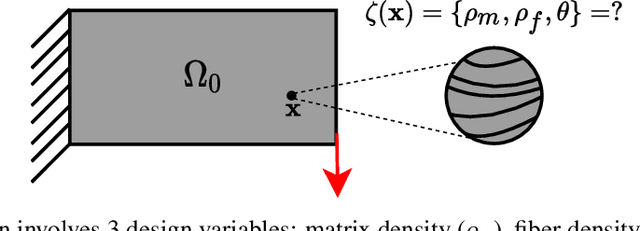
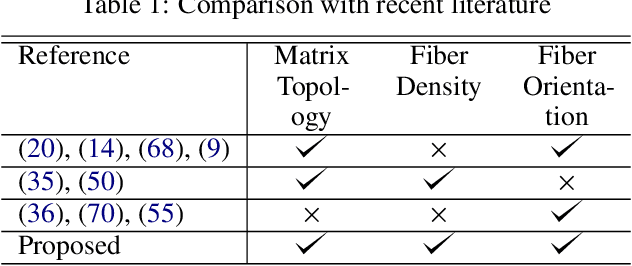
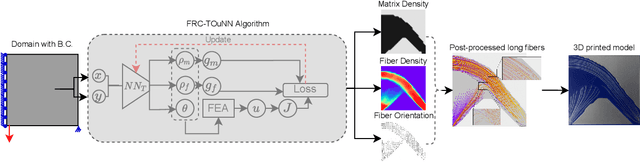
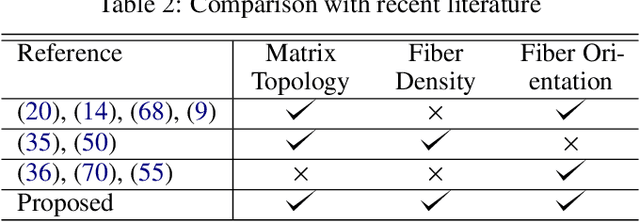
In this paper, we present a topology optimization (TO) framework to simultaneously optimize the matrix topology and fiber distribution of functionally graded continuous fiber-reinforced composites (FRC). Current approaches in density-based TO for FRC use the underlying finite element mesh both for analysis and design representation. This poses several limitations while enforcing sub-element fiber spacing and generating high-resolution continuous fibers. In contrast, we propose a mesh-independent representation based on a neural network (NN) both to capture the matrix topology and fiber distribution. The implicit NN-based representation enables geometric and material queries at a higher resolution than a mesh discretization. This leads to the accurate extraction of functionally-graded continuous fibers. Further, by integrating the finite element simulations into the NN computational framework, we can leverage automatic differentiation for end-to-end automated sensitivity analysis, i.e., we no longer need to manually derive cumbersome sensitivity expressions. We demonstrate the effectiveness and computational efficiency of the proposed method through several numerical examples involving various objective functions. We also show that the optimized continuous fiber reinforced composites can be directly fabricated at high resolution using additive manufacturing.
Accelerating Part-Scale Simulation in Liquid Metal Jet Additive Manufacturing via Operator Learning
Feb 02, 2022



Predicting part quality for additive manufacturing (AM) processes requires high-fidelity numerical simulation of partial differential equations (PDEs) governing process multiphysics on a scale of minimum manufacturable features. This makes part-scale predictions computationally demanding, especially when they require many small-scale simulations. We consider drop-on-demand liquid metal jetting (LMJ) as an illustrative example of such computational complexity. A model describing droplet coalescence for LMJ may include coupled incompressible fluid flow, heat transfer, and phase change equations. Numerically solving these equations becomes prohibitively expensive when simulating the build process for a full part consisting of thousands to millions of droplets. Reduced-order models (ROMs) based on neural networks (NN) or k-nearest neighbor (kNN) algorithms have been built to replace the original physics-based solver and are computationally tractable for part-level simulations. However, their quick inference capabilities often come at the expense of accuracy, robustness, and generalizability. We apply an operator learning (OL) approach to learn a mapping between initial and final states of the droplet coalescence process for enabling rapid and accurate part-scale build simulation. Preliminary results suggest that OL requires order-of-magnitude fewer data points than a kNN approach and is generalizable beyond the training set while achieving similar prediction error.
* Paper #25
Surrogate Modeling for Physical Systems with Preserved Properties and Adjustable Tradeoffs
Feb 02, 2022Determining the proper level of details to develop and solve physical models is usually difficult when one encounters new engineering problems. Such difficulty comes from how to balance the time (simulation cost) and accuracy for the physical model simulation afterwards. We propose a framework for automatic development of a family of surrogate models of physical systems that provide flexible cost-accuracy tradeoffs to assist making such determinations. We present both a model-based and a data-driven strategy to generate surrogate models. The former starts from a high-fidelity model generated from first principles and applies a bottom-up model order reduction (MOR) that preserves stability and convergence while providing a priori error bounds, although the resulting reduced-order model may lose its interpretability. The latter generates interpretable surrogate models by fitting artificial constitutive relations to a presupposed topological structure using experimental or simulation data. For the latter, we use Tonti diagrams to systematically produce differential equations from the assumed topological structure using algebraic topological semantics that are common to various lumped-parameter models (LPM). The parameter for the constitutive relations are estimated using standard system identification algorithms. Our framework is compatible with various spatial discretization schemes for distributed parameter models (DPM), and can supports solving engineering problems in different domains of physics.
* Paper #202
AI Research Associate for Early-Stage Scientific Discovery
Feb 02, 2022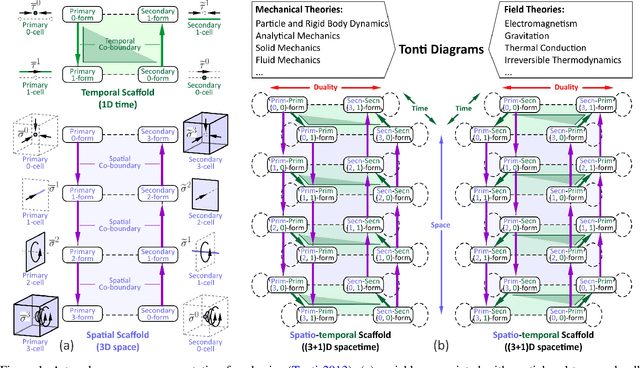
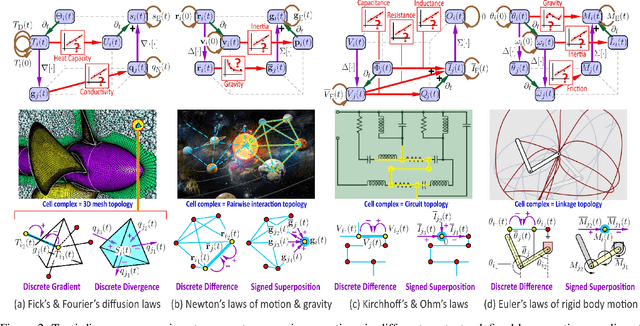
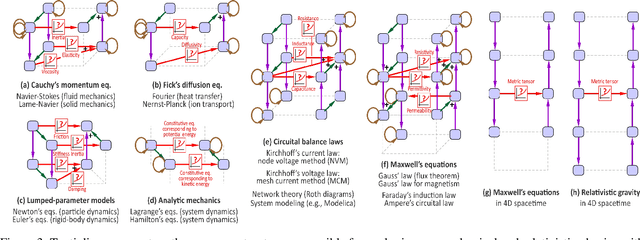

Artificial intelligence (AI) has been increasingly applied in scientific activities for decades; however, it is still far from an insightful and trustworthy collaborator in the scientific process. Most existing AI methods are either too simplistic to be useful in real problems faced by scientists or too domain-specialized (even dogmatized), stifling transformative discoveries or paradigm shifts. We present an AI research associate for early-stage scientific discovery based on (a) a novel minimally-biased ontology for physics-based modeling that is context-aware, interpretable, and generalizable across classical and relativistic physics; (b) automatic search for viable and parsimonious hypotheses, represented at a high-level (via domain-agnostic constructs) with built-in invariants, e.g., postulated forms of conservation principles implied by a presupposed spacetime topology; and (c) automatic compilation of the enumerated hypotheses to domain-specific, interpretable, and trainable/testable tensor-based computation graphs to learn phenomenological relations, e.g., constitutive or material laws, from sparse (and possibly noisy) data sets.
* Paper #203
PATO: Producibility-Aware Topology Optimization using Deep Learning for Metal Additive Manufacturing
Dec 08, 2021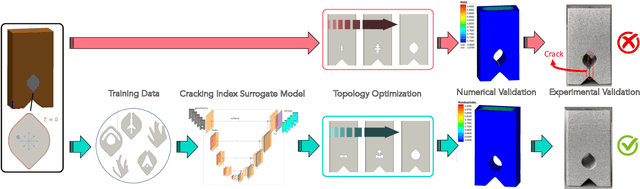
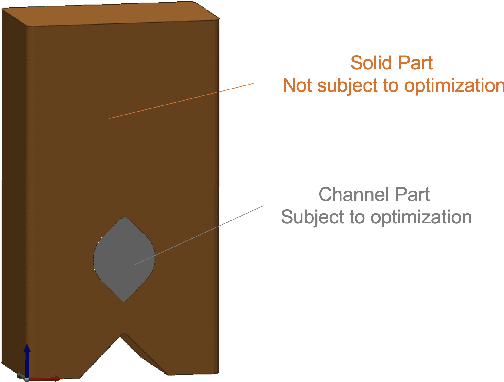
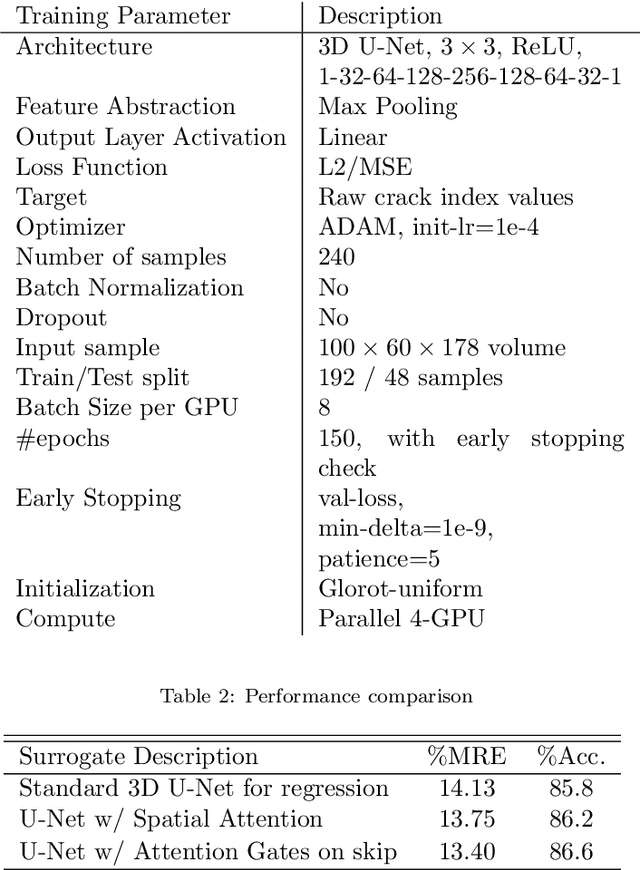
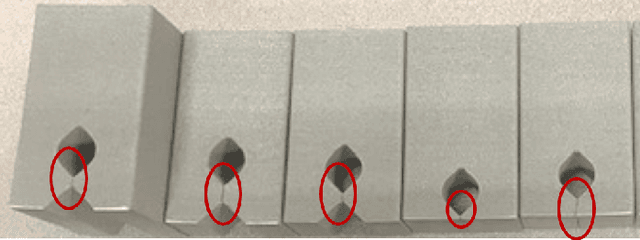
In this paper, we propose PATO-a producibility-aware topology optimization (TO) framework to help efficiently explore the design space of components fabricated using metal additive manufacturing (AM), while ensuring manufacturability with respect to cracking. Specifically, parts fabricated through Laser Powder Bed Fusion are prone to defects such as warpage or cracking due to high residual stress values generated from the steep thermal gradients produced during the build process. Maturing the design for such parts and planning their fabrication can span months to years, often involving multiple handoffs between design and manufacturing engineers. PATO is based on the a priori discovery of crack-free designs, so that the optimized part can be built defect-free at the outset. To ensure that the design is crack free during optimization, producibility is explicitly encoded within the standard formulation of TO, using a crack index. Multiple crack indices are explored and using experimental validation, maximum shear strain index (MSSI) is shown to be an accurate crack index. Simulating the build process is a coupled, multi-physics computation and incorporating it in the TO loop can be computationally prohibitive. We leverage the current advances in deep convolutional neural networks and present a high-fidelity surrogate model based on an Attention-based U-Net architecture to predict the MSSI values as a spatially varying field over the part's domain. Further, we employ automatic differentiation to directly compute the gradient of maximum MSSI with respect to the input design variables and augment it with the performance-based sensitivity field to optimize the design while considering the trade-off between weight, manufacturability, and functionality. We demonstrate the effectiveness of the proposed method through benchmark studies in 3D as well as experimental validation.
Exploring Feasible Design Spaces for Heterogeneous Constraints
Jul 10, 2019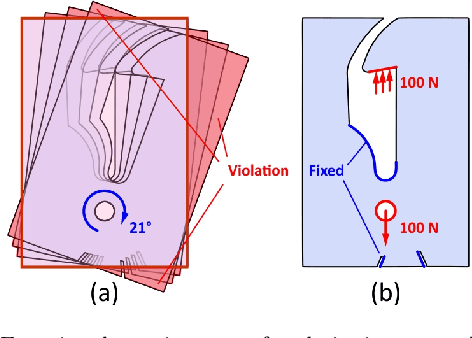
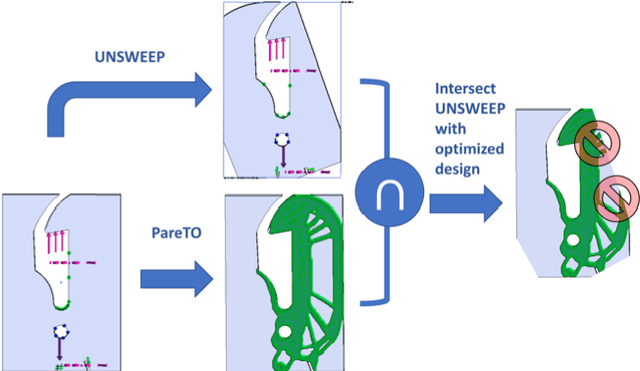
We demonstrate an approach of exploring design spaces to simultaneously satisfy kinematics- and physics-based requirements. We present a classification of constraints and solvers to enable postponing optimization as far down the design workflow as possible. The solvers are organized into two broad classes of design space 'pruning' and 'exploration' by considering the types of constraints they can satisfy. We show that pointwise constraints define feasible design subspaces that can be represented and computed as first-class entities by their maximal feasible elements. The design space is pruned upfront by intersecting maximal elements, without premature optimization. To solve for other constraints, we apply topology optimization (TO), starting from the pruned feasible space. The optimization is steered by a topological sensitivity field (TSF) that measures the global changes in violation of constraints with respect to local topological punctures. The TSF for global objective functions is augmented with TSF for global constraints, and penalized/filtered to incorporate local constraints, including set constraints converted to differentiable (in)equality constraints. We demonstrate application of the proposed workflow to nontrivial examples in design and manufacturing. Among other examples, we show how to explore pruned design spaces via TO to simultaneously satisfy physics-based constraints (e.g., minimize compliance and mass) as well as kinematics-based constraints (e.g., maximize accessibility for machining).
* Special Issue on Generative Design
Automatic Support Removal for Additive Manufacturing Post Processing
May 28, 2019
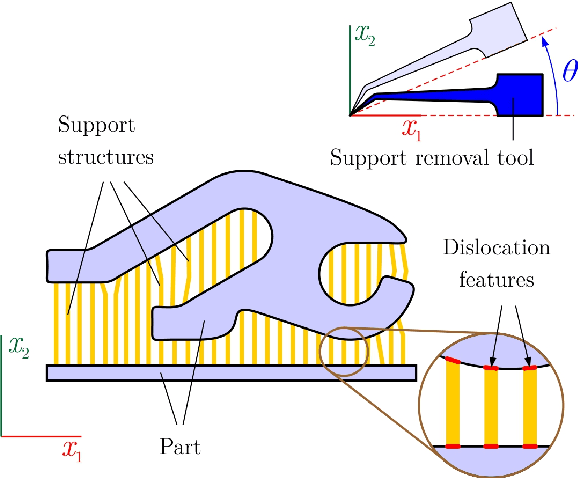
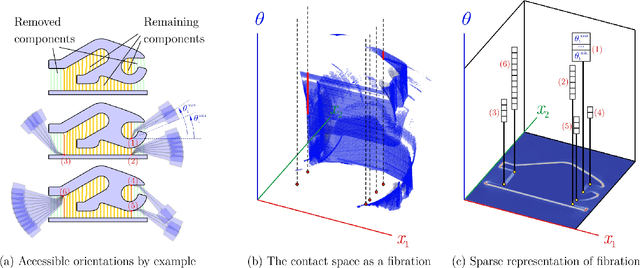
An additive manufacturing (AM) process often produces a {\it near-net} shape that closely conforms to the intended design to be manufactured. It sometimes contains additional support structure (also called scaffolding), which has to be removed in post-processing. We describe an approach to automatically generate process plans for support removal using a multi-axis machining instrument. The goal is to fracture the contact regions between each support component and the part, and to do it in the most cost-effective order while avoiding collisions with evolving near-net shape, including the remaining support components. A recursive algorithm identifies a maximal collection of support components whose connection regions to the part are accessible as well as the orientations at which they can be removed at a given round. For every such region, the accessible orientations appear as a 'fiber' in the collision-free space of the evolving near-net shape and the tool assembly. To order the removal of accessible supports, the algorithm constructs a search graph whose edges are weighted by the Riemannian distance between the fibers. The least expensive process plan is obtained by solving a traveling salesman problem (TSP) over the search graph. The sequence of configurations obtained by solving TSP is used as the input to a motion planner that finds collision free paths to visit all accessible features. The resulting part without the support structure can then be finished using traditional machining to produce the intended design. The effectiveness of the method is demonstrated through benchmark examples in 3D.
* Special Issue on symposium on Solid and Physical Modeling (SPM'2019)