 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Neural Implicit Representation of Accessibility for Multi-Axis Manufacturing
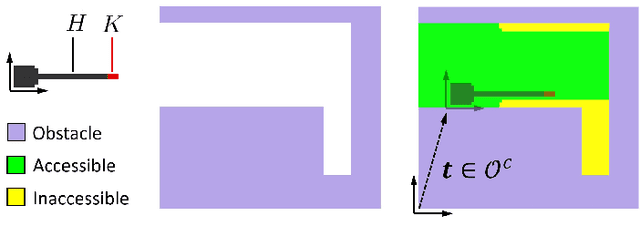
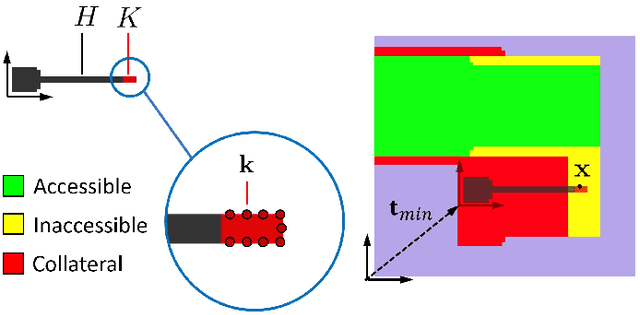
Aug 30, 2024One of the main concerns in design and process planning for multi-axis additive and subtractive manufacturing is collision avoidance between moving objects (e.g., tool assemblies) and stationary objects (e.g., a part unified with fixtures). The collision measure for various pairs of relative rigid translations and rotations between the two pointsets can be conceptualized by a compactly supported scalar field over the 6D non-Euclidean configuration space. Explicit representation and computation of this field is costly in both time and space. If we fix $O(m)$ sparsely sampled rotations (e.g., tool orientations), computation of the collision measure field as a convolution of indicator functions of the 3D pointsets over a uniform grid (i.e., voxelized geometry) of resolution $O(n^3)$ via fast Fourier transforms (FFTs) scales as in $O(mn^3 \log n)$ in time and $O(mn^3)$ in space. In this paper, we develop an implicit representation of the collision measure field via deep neural networks (DNNs). We show that our approach is able to accurately interpolate the collision measure from a sparse sampling of rotations, and can represent the collision measure field with a small memory footprint. Moreover, we show that this representation can be efficiently updated through fine-tuning to more efficiently train the network on multi-resolution data, as well as accommodate incremental changes to the geometry (such as might occur in iterative processes such as topology optimization of the part subject to CNC tool accessibility constraints).
* Special Issue on symposium on Solid and Physical Modeling (SPM 2023)
Hybrid Manufacturing Process Planning for Arbitrary Part and Tool Shapes
May 24, 2022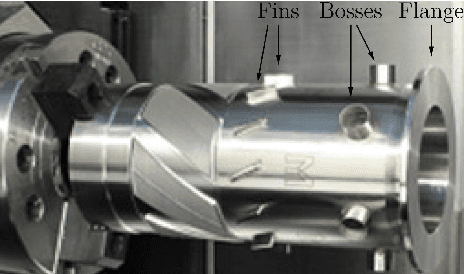

Hybrid manufacturing (HM) technologies combine additive and subtractive manufacturing (AM/SM) capabilities in multi-modal process plans that leverage the strengths of each. Despite the growing interest in HM technologies, software tools for process planning have not caught up with advances in hardware and typically impose restrictions that limit the design and manufacturing engineers' ability to systematically explore the full design and process planning spaces. We present a general framework for identifying AM/SM actions that make up an HM process plan based on accessibility and support requirements, using morphological operations that allow for arbitrary part and tool geometries to be considered. To take advantage of multi-modality, we define the actions to allow for temporary excessive material deposition or removal, with an understanding that subsequent actions can correct for them, unlike the case in unimodal (AM-only or SM-only) process plans that are monotonic. We use this framework to generate a combinatorial space of valid, potentially non-monotonic, process plans for a given part of arbitrary shape, a collection of AM/SM tools of arbitrary shapes, and a set of relative rotations (fixed for each action) between them, representing build/fixturing directions on $3-$axis machines. Finally, we use define a simple objective function quantifying the cost of materials and operating time in terms of deposition/removal volumes and use a search algorithm to explore the exponentially large space of valid process plans to find "cost-optimal" solutions. We demonstrate the effectiveness of our method on 3D examples.
* Special Issue on symposium on Solid and Physical Modeling (SPM'2022)