 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Immersive Video Streaming: A Comprehensive Survey, Benchmarking, and Open Challenges
Oct 31, 2023Over the past decade, the utilization of UAVs has witnessed significant growth, owing to their agility, rapid deployment, and maneuverability. In particular, the use of UAV-mounted 360-degree cameras to capture omnidirectional videos has enabled truly immersive viewing experiences with up to 6DoF. However, achieving this immersive experience necessitates encoding omnidirectional videos in high resolution, leading to increased bitrates. Consequently, new challenges arise in terms of latency, throughput, perceived quality, and energy consumption for real-time streaming of such content. This paper presents a comprehensive survey of research efforts in UAV-based immersive video streaming, benchmarks popular video encoding schemes, and identifies open research challenges. Initially, we review the literature on 360-degree video coding, packaging, and streaming, with a particular focus on standardization efforts to ensure interoperability of immersive video streaming devices and services. Subsequently, we provide a comprehensive review of research efforts focused on optimizing video streaming for timevarying UAV wireless channels. Additionally, we introduce a high resolution 360-degree video dataset captured from UAVs under different flying conditions. This dataset facilitates the evaluation of complexity and coding efficiency of software and hardware video encoders based on popular video coding standards and formats, including AVC/H.264, HEVC/H.265, VVC/H.266, VP9, and AV1. Our results demonstrate that HEVC achieves the best trade-off between coding efficiency and complexity through its hardware implementation, while AV1 format excels in coding efficiency through its software implementation, specifically using the libsvt-av1 encoder. Furthermore, we present a real testbed showcasing 360-degree video streaming over a UAV, enabling remote control of the drone via a 5G cellular network.
Distributed Power Control for Large Energy Harvesting Networks: A Multi-Agent Deep Reinforcement Learning Approach
Apr 01, 2019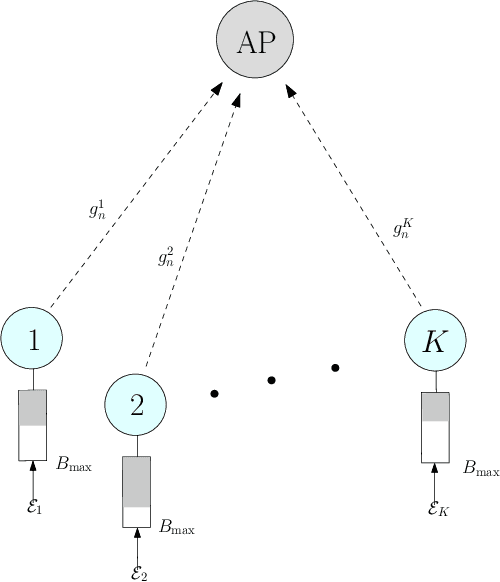
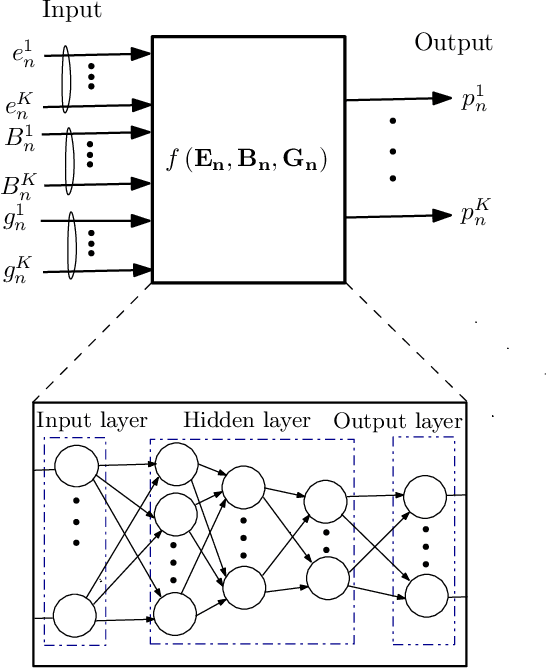
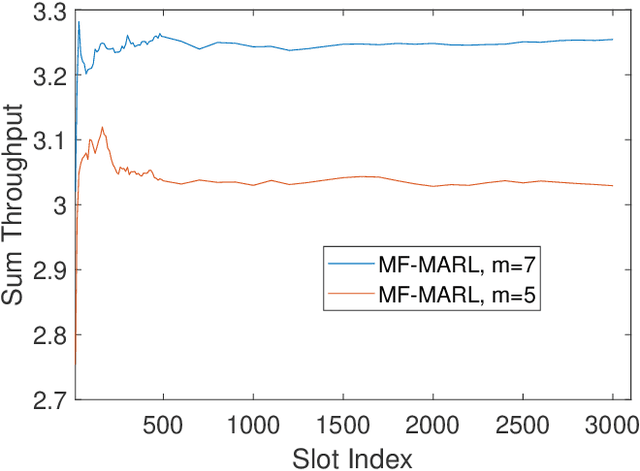
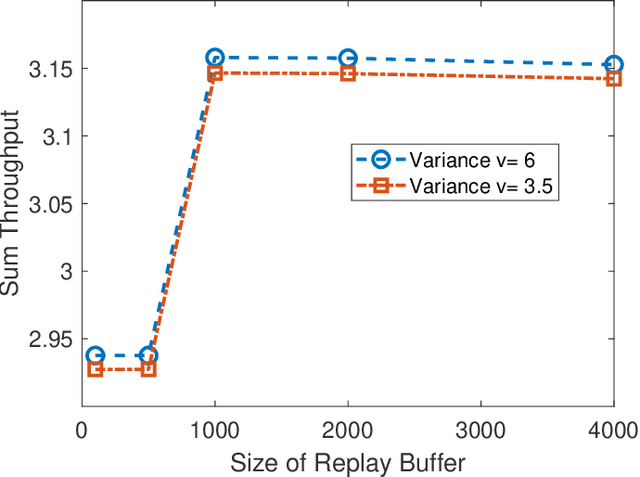
In this paper, we develop a multi-agent reinforcement learning (MARL) framework to obtain online power control policies for a large energy harvesting (EH) multiple access channel, when only the causal information about the EH process and wireless channel is available. In the proposed framework, we model the online power control problem as a discrete-time mean-field game (MFG), and leverage the deep reinforcement learning technique to learn the stationary solution of the game in a distributed fashion. We analytically show that the proposed procedure converges to the unique stationary solution of the MFG. Using the proposed framework, the power control policies are learned in a completely distributed fashion. In order to benchmark the performance of the distributed policies, we also develop a deep neural network (DNN) based centralized as well as distributed online power control schemes. Our simulation results show the efficacy of the proposed power control policies. In particular, the DNN based centralized power control policies provide a very good performance for large EH networks for which the design of optimal policies is intractable using the conventional methods such as Markov decision processes. Further, performance of both the distributed policies is close to the throughput achieved by the centralized policies.