 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeURLLC-Aware Proactive UAV Placement in Internet of Vehicles
Jan 30, 2024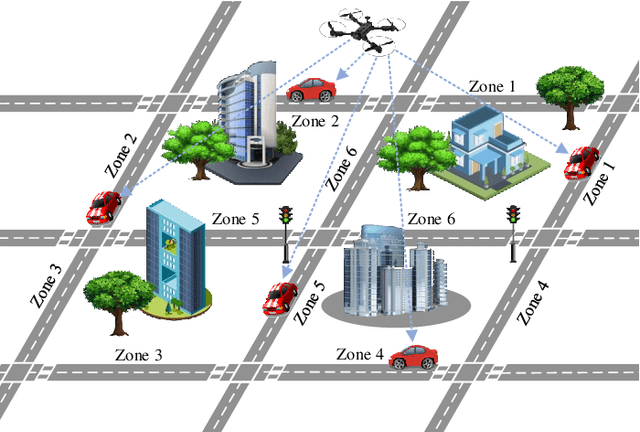
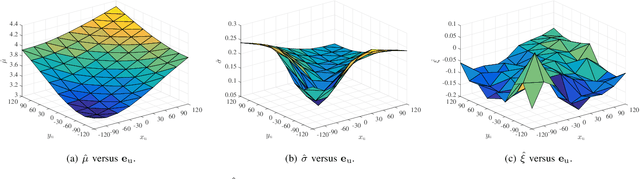
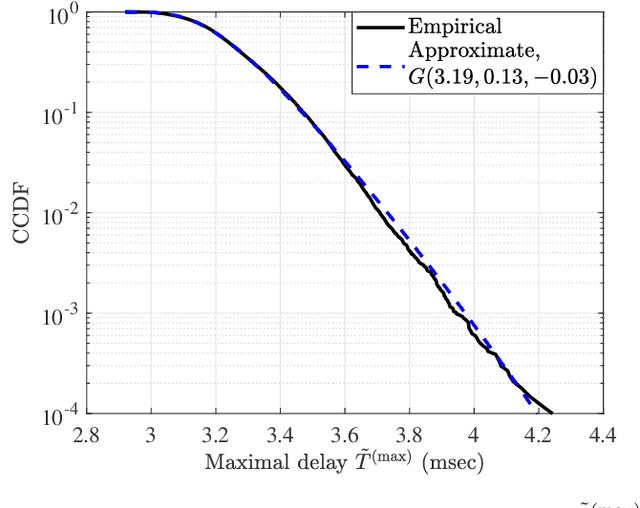
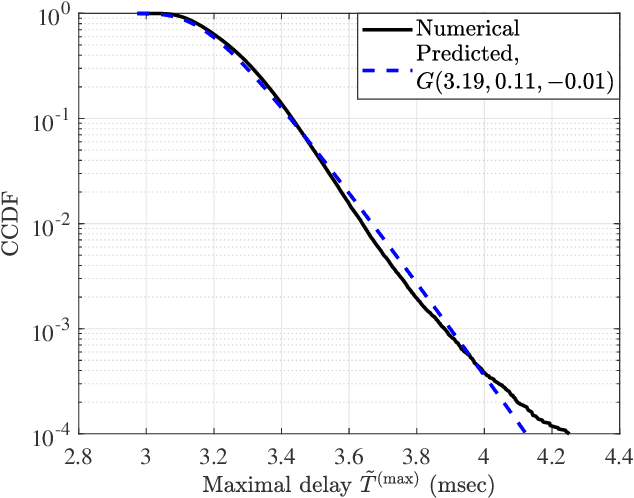
Unmanned aerial vehicles (UAVs) are envisioned to provide diverse services from the air. The service quality may rely on the wireless performance which is affected by the UAV's position. In this paper, we focus on the UAV placement problem in the Internet of Vehicles, where the UAV is deployed to monitor the road traffic and sends the monitored videos to vehicles. The studied problem is formulated as video resolution maximization by optimizing over the UAV's position. Moreover, we take into account the maximal transmission delay and impose a probabilistic constraint. To solve the formulated problem, we first leverage the techniques in extreme value theory (EVT) and Gaussian process regression (GPR) to characterize the influence of the UAV's position on the delay performance. Based on this characterization, we subsequently propose a proactive resolution selection and UAV placement approach, which adaptively places the UAV according to the geographic distribution of vehicles. Numerical results justify the joint usage of EVT and GPR for maximal delay characterization. Through investigating the maximal transmission delay, the proposed approach nearly achieves the optimal performance when vehicles are evenly distributed, and reduces 10% and 19% of the 999-th 1000-quantile over two baselines when vehicles are biased distributed.
UAV Immersive Video Streaming: A Comprehensive Survey, Benchmarking, and Open Challenges
Oct 31, 2023Over the past decade, the utilization of UAVs has witnessed significant growth, owing to their agility, rapid deployment, and maneuverability. In particular, the use of UAV-mounted 360-degree cameras to capture omnidirectional videos has enabled truly immersive viewing experiences with up to 6DoF. However, achieving this immersive experience necessitates encoding omnidirectional videos in high resolution, leading to increased bitrates. Consequently, new challenges arise in terms of latency, throughput, perceived quality, and energy consumption for real-time streaming of such content. This paper presents a comprehensive survey of research efforts in UAV-based immersive video streaming, benchmarks popular video encoding schemes, and identifies open research challenges. Initially, we review the literature on 360-degree video coding, packaging, and streaming, with a particular focus on standardization efforts to ensure interoperability of immersive video streaming devices and services. Subsequently, we provide a comprehensive review of research efforts focused on optimizing video streaming for timevarying UAV wireless channels. Additionally, we introduce a high resolution 360-degree video dataset captured from UAVs under different flying conditions. This dataset facilitates the evaluation of complexity and coding efficiency of software and hardware video encoders based on popular video coding standards and formats, including AVC/H.264, HEVC/H.265, VVC/H.266, VP9, and AV1. Our results demonstrate that HEVC achieves the best trade-off between coding efficiency and complexity through its hardware implementation, while AV1 format excels in coding efficiency through its software implementation, specifically using the libsvt-av1 encoder. Furthermore, we present a real testbed showcasing 360-degree video streaming over a UAV, enabling remote control of the drone via a 5G cellular network.
Federated Learning with Correlated Data: Taming the Tail for Age-Optimal Industrial IoT
Aug 17, 2021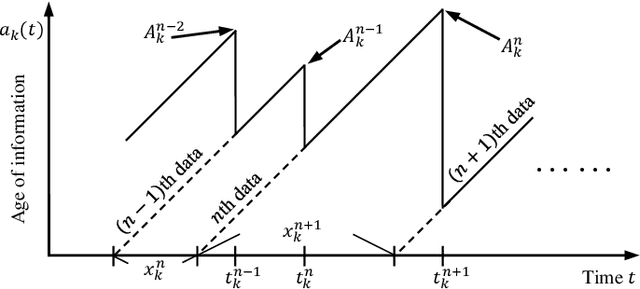


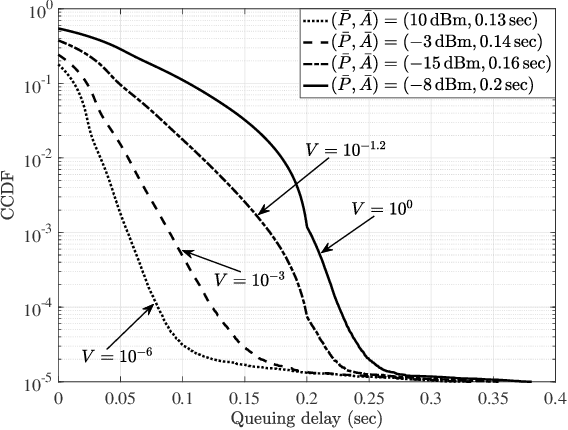
While information delivery in industrial Internet of things demands reliability and latency guarantees, the freshness of the controller's available information, measured by the age of information (AoI), is paramount for high-performing industrial automation. The problem in this work is cast as a sensor's transmit power minimization subject to the peak-AoI requirement and a probabilistic constraint on queuing latency. We further characterize the tail behavior of the latency by a generalized Pareto distribution (GPD) for solving the power allocation problem through Lyapunov optimization. As each sensor utilizes its own data to locally train the GPD model, we incorporate federated learning and propose a local-model selection approach which accounts for correlation among the sensor's training data. Numerical results show the tradeoff between the transmit power, peak AoI, and delay's tail distribution. Furthermore, we verify the superiority of the proposed correlation-aware approach for selecting the local models in federated learning over an existing baseline.