 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating friction coefficient using generative modelling
Mar 10, 2023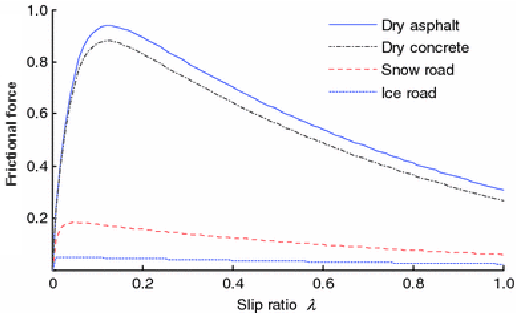
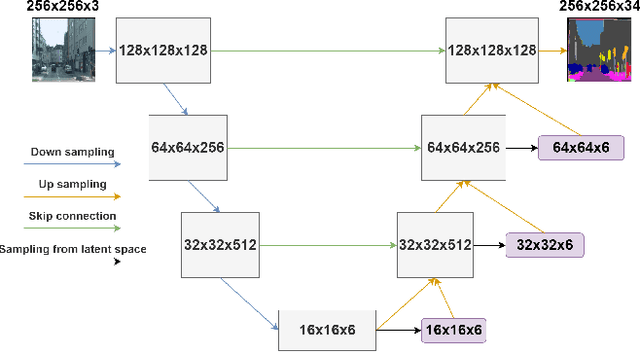
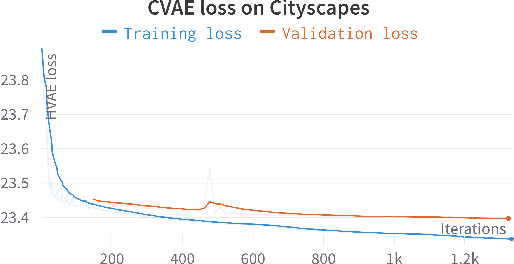
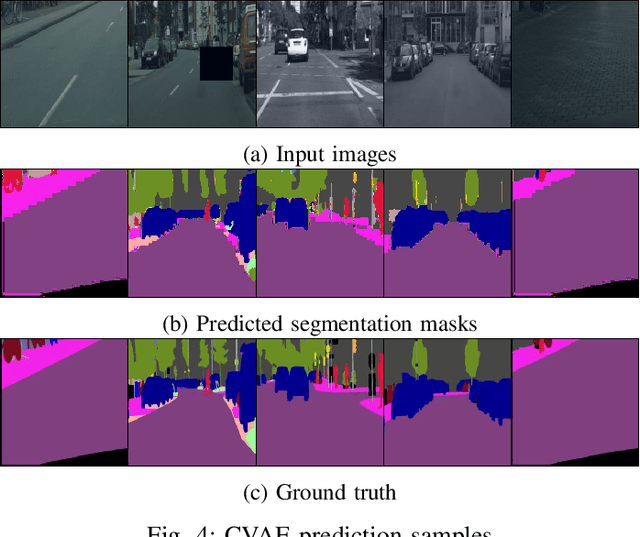
It is common to utilise dynamic models to measure the tyre-road friction in real-time. Alternatively, predictive approaches estimate the tyre-road friction by identifying the environmental factors affecting it. This work aims to formulate the problem of friction estimation as a visual perceptual learning task. The problem is broken down into detecting surface characteristics by applying semantic segmentation and using the extracted features to predict the frictional force. This work for the first time formulates the friction estimation problem as a regression from the latent space of a semantic segmentation model. The preliminary results indicate that this approach can estimate frictional force.
ARAE: Adversarially Robust Training of Autoencoders Improves Novelty Detection
Mar 12, 2020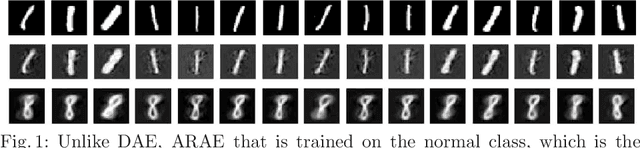
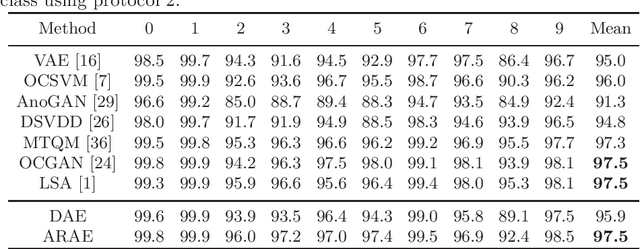
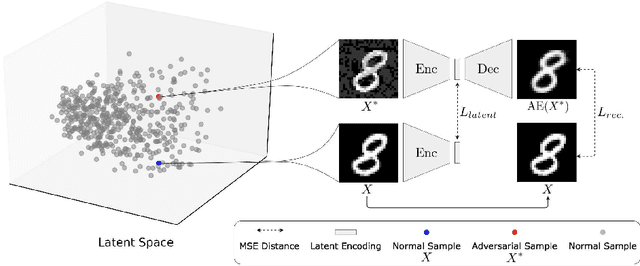

Autoencoders (AE) have recently been widely employed to approach the novelty detection problem. Trained only on the normal data, the AE is expected to reconstruct the normal data effectively while fail to regenerate the anomalous data, which could be utilized for novelty detection. However, in this paper, it is demonstrated that this does not always hold. AE often generalizes so perfectly that it can also reconstruct the anomalous data well. To address this problem, we propose a novel AE that can learn more semantically meaningful features. Specifically, we exploit the fact that adversarial robustness promotes learning of meaningful features. Therefore, we force the AE to learn such features by penalizing networks with a bottleneck layer that is unstable against adversarial perturbations. We show that despite using a much simpler architecture in comparison to the prior methods, the proposed AE outperforms or is competitive to state-of-the-art on three benchmark datasets.