Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating friction coefficient using generative modelling
Paper and Code
Mar 10, 2023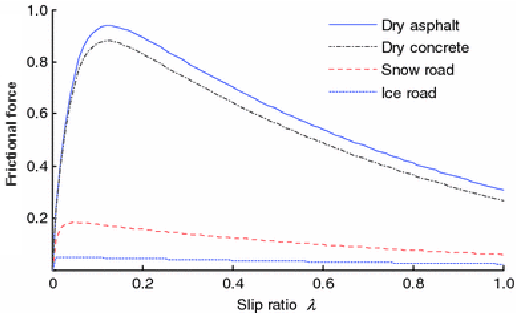
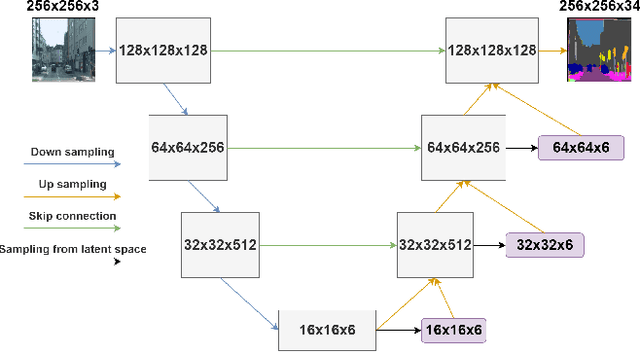
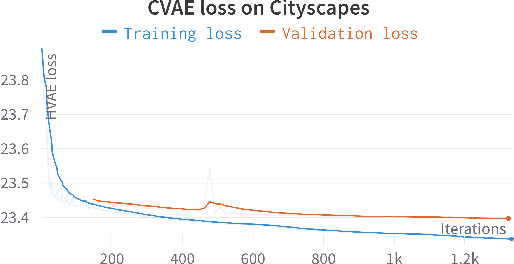
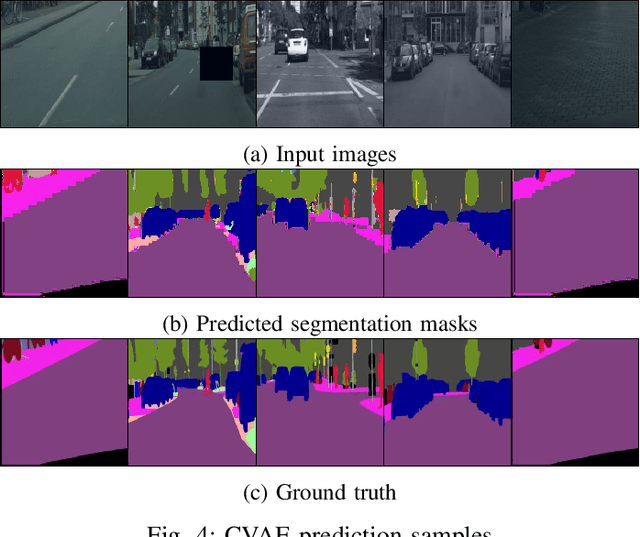
It is common to utilise dynamic models to measure the tyre-road friction in real-time. Alternatively, predictive approaches estimate the tyre-road friction by identifying the environmental factors affecting it. This work aims to formulate the problem of friction estimation as a visual perceptual learning task. The problem is broken down into detecting surface characteristics by applying semantic segmentation and using the extracted features to predict the frictional force. This work for the first time formulates the friction estimation problem as a regression from the latent space of a semantic segmentation model. The preliminary results indicate that this approach can estimate frictional force.
* To be published in ICM2023
View paper on