 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Gateway Ports in Maritime Using Temporal Graph Neural Network Port Classification
Apr 25, 2022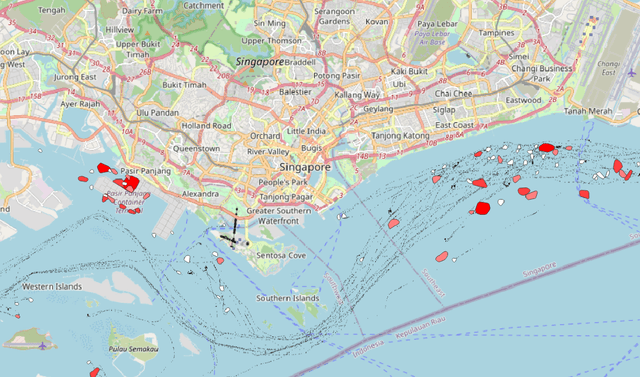
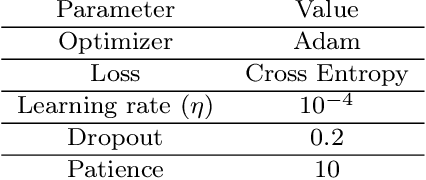
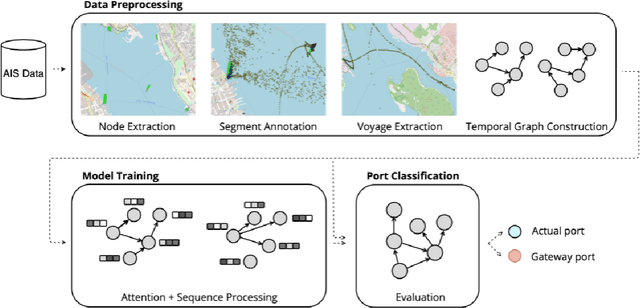
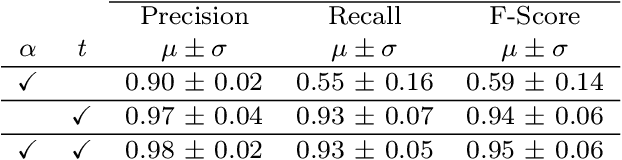
Vessel navigation is influenced by various factors, such as dynamic environmental factors that change over time or static features such as vessel type or depth of the ocean. These dynamic and static navigational factors impose limitations on vessels, such as long waiting times in regions outside the actual ports, and we call these waiting regions gateway ports. Identifying gateway ports and their associated features such as congestion and available utilities can enhance vessel navigation by planning on fuel optimization or saving time in cargo operation. In this paper, we propose a novel temporal graph neural network (TGNN) based port classification method to enable vessels to discover gateway ports efficiently, thus optimizing their operations. The proposed method processes vessel trajectory data to build dynamic graphs capturing spatio-temporal dependencies between a set of static and dynamic navigational features in the data, and it is evaluated in terms of port classification accuracy on a real-world data set collected from ten vessels operating in Halifax, NS, Canada. The experimental results indicate that our TGNN-based port classification method provides an f-score of 95% in classifying ports.
Using Deep Reinforcement Learning Methods for Autonomous Vessels in 2D Environments
Mar 23, 2020

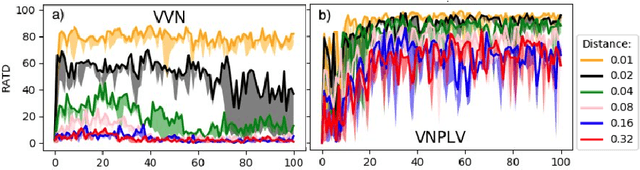

Unmanned Surface Vehicles technology (USVs) is an exciting topic that essentially deploys an algorithm to safely and efficiently performs a mission. Although reinforcement learning is a well-known approach to modeling such a task, instability and divergence may occur when combining off-policy and function approximation. In this work, we used deep reinforcement learning combining Q-learning with a neural representation to avoid instability. Our methodology uses deep q-learning and combines it with a rolling wave planning approach on agile methodology. Our method contains two critical parts in order to perform missions in an unknown environment. The first is a path planner that is responsible for generating a potential effective path to a destination without considering the details of the root. The latter is a decision-making module that is responsible for short-term decisions on avoiding obstacles during the near future steps of USV exploitation within the context of the value function. Simulations were performed using two algorithms: a basic vanilla vessel navigator (VVN) as a baseline and an improved one for the vessel navigator with a planner and local view (VNPLV). Experimental results show that the proposed method enhanced the performance of VVN by 55.31 on average for long-distance missions. Our model successfully demonstrated obstacle avoidance by means of deep reinforcement learning using planning adaptive paths in unknown environments.
Wise Sliding Window Segmentation: A classification-aided approach for trajectory segmentation
Mar 23, 2020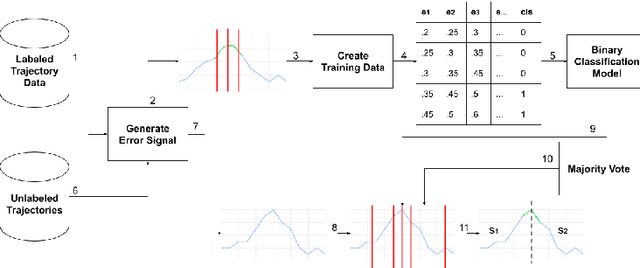

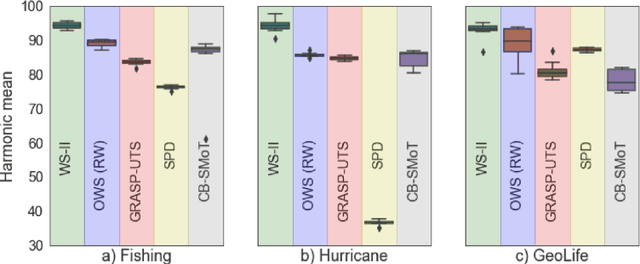
Large amounts of mobility data are being generated from many different sources, and several data mining methods have been proposed for this data. One of the most critical steps for trajectory data mining is segmentation. This task can be seen as a pre-processing step in which a trajectory is divided into several meaningful consecutive sub-sequences. This process is necessary because trajectory patterns may not hold in the entire trajectory but on trajectory parts. In this work, we propose a supervised trajectory segmentation algorithm, called Wise Sliding Window Segmentation (WS-II). It processes the trajectory coordinates to find behavioral changes in space and time, generating an error signal that is further used to train a binary classifier for segmenting trajectory data. This algorithm is flexible and can be used in different domains. We evaluate our method over three real datasets from different domains (meteorology, fishing, and individuals movements), and compare it with four other trajectory segmentation algorithms: OWS, GRASP-UTS, CB-SMoT, and SPD. We observed that the proposed algorithm achieves the highest performance for all datasets with statistically significant differences in terms of the harmonic mean of purity and coverage.
On feature selection and evaluation of transportation mode prediction strategies
Sep 05, 2018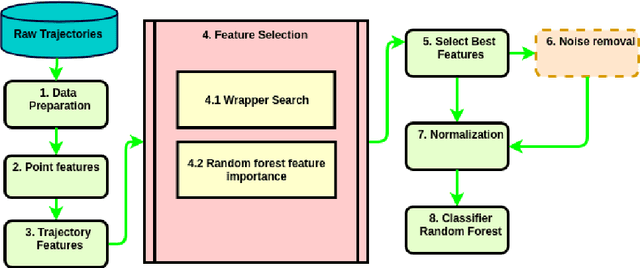
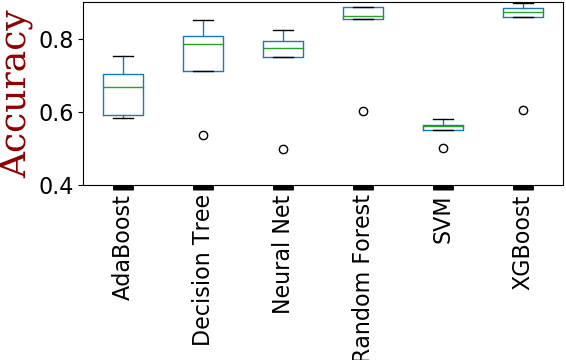
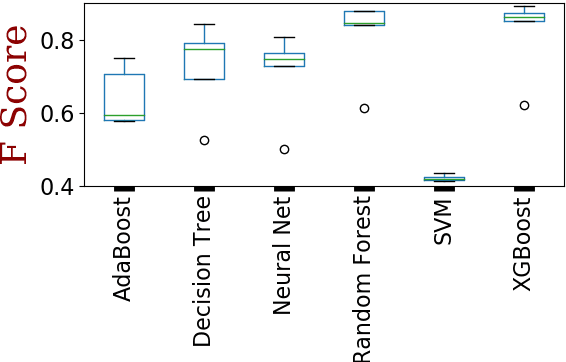
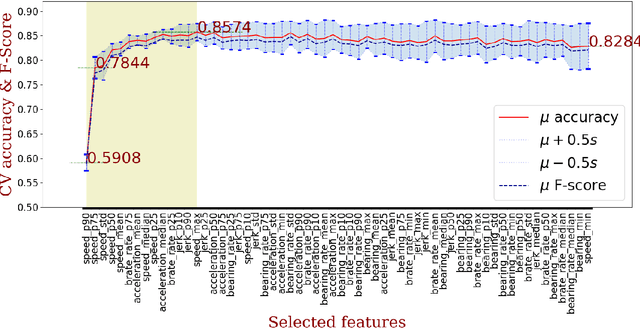
Transportation modes prediction is a fundamental task for decision making in smart cities and traffic management systems. Traffic policies designed based on trajectory mining can save money and time for authorities and the public. It may reduce the fuel consumption and commute time and moreover, may provide more pleasant moments for residents and tourists. Since the number of features that may be used to predict a user transportation mode can be substantial, finding a subset of features that maximizes a performance measure is worth investigating. In this work, we explore wrapper and information retrieval methods to find the best subset of trajectory features. After finding the best classifier and the best feature subset, our results were compared with two related papers that applied deep learning methods and the results showed that our framework achieved better performance. Furthermore, two types of cross-validation approaches were investigated, and the performance results show that the random cross-validation method provides optimistic results.
Transportation Modes Classification Using Feature Engineering
Jul 28, 2018


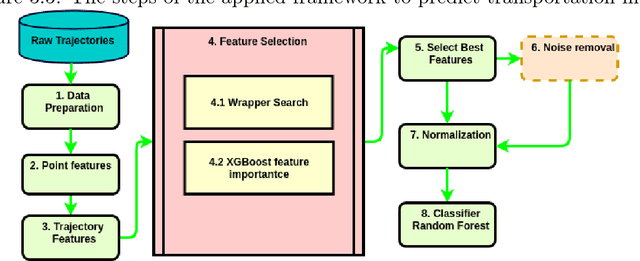
Predicting transportation modes from GPS (Global Positioning System) records is a hot topic in the trajectory mining domain. Each GPS record is called a trajectory point and a trajectory is a sequence of these points. Trajectory mining has applications including but not limited to transportation mode detection, tourism, traffic congestion, smart cities management, animal behaviour analysis, environmental preservation, and traffic dynamics are some of the trajectory mining applications. Transportation modes prediction as one of the tasks in human mobility and vehicle mobility applications plays an important role in resource allocation, traffic management systems, tourism planning and accident detection. In this work, the proposed framework in Etemad et al. is extended to consider other aspects in the task of transportation modes prediction. Wrapper search and information retrieval methods were investigated to find the best subset of trajectory features. Finding the best classifier and the best feature subset, the framework is compared against two related papers that applied deep learning methods. The results show that our framework achieved better performance. Moreover, the ground truth noise removal improved accuracy of transportation modes prediction task; however, the assumption of having access to test set labels in pre-processing task is invalid. Furthermore, the cross validation approaches were investigated and the performance results show that the random cross validation method provides optimistic results.