 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy-Guided Lazy Search with Feedback for Task and Motion Planning
Oct 25, 2022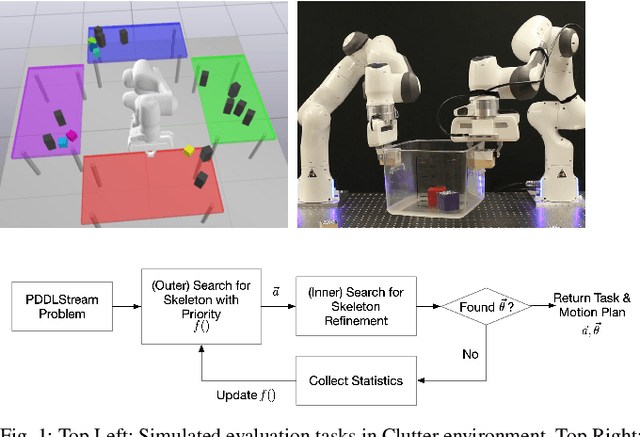
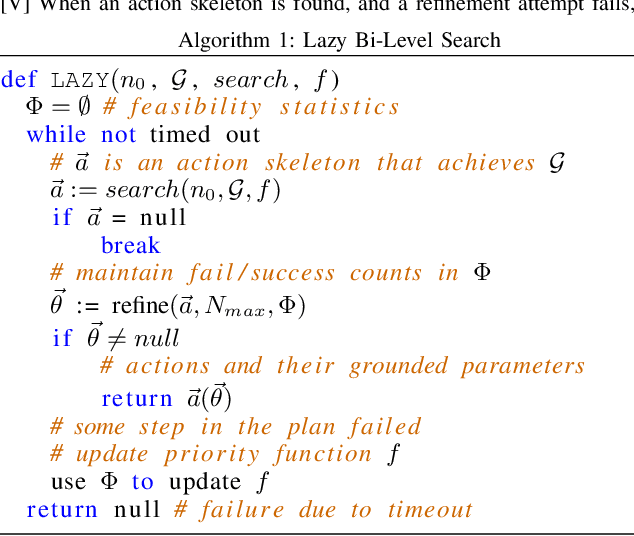
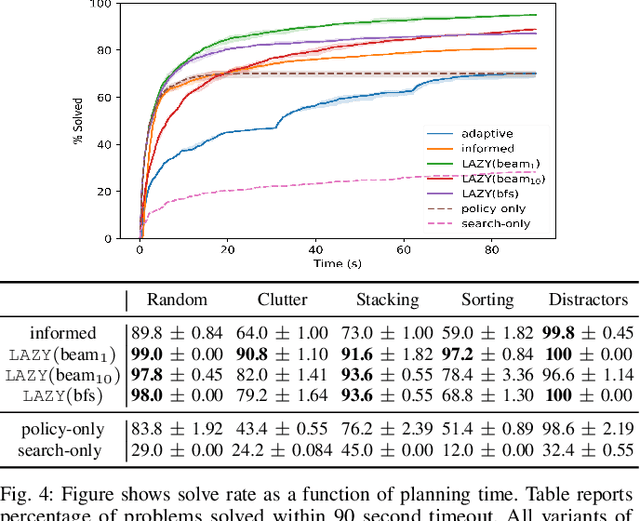
PDDLStream solvers have recently emerged as viable solutions for Task and Motion Planning (TAMP) problems, extending PDDL to problems with continuous action spaces. Prior work has shown how PDDLStream problems can be reduced to a sequence of PDDL planning problems, which can then be solved using off-the-shelf planners. However, this approach can suffer from long runtimes. In this paper we propose LAZY, a solver for PDDLStream problems that maintains a single integrated search over action skeletons, which gets progressively more geometrically informed as samples of possible motions are lazily drawn during motion planning. We explore how learned models of goal-directed policies and current motion sampling data can be incorporated in LAZY to adaptively guide the task planner. We show that this leads to significant speed-ups in the search for a feasible solution evaluated over unseen test environments of varying numbers of objects, goals, and initial conditions. We evaluate our TAMP approach by comparing to existing solvers for PDDLStream problems on a range of simulated 7DoF rearrangement/manipulation problems.
TASKOGRAPHY: Evaluating robot task planning over large 3D scene graphs
Jul 11, 2022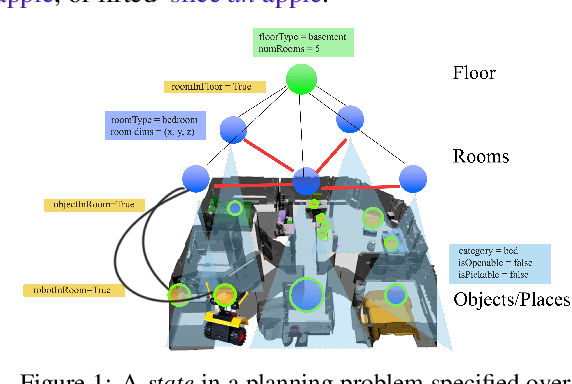
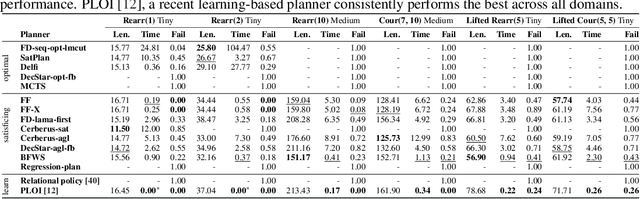
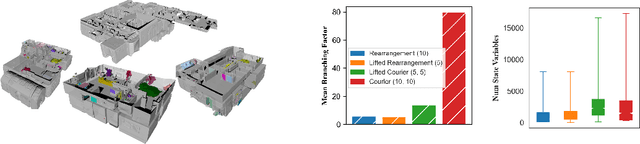
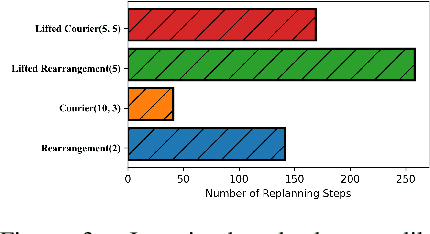
3D scene graphs (3DSGs) are an emerging description; unifying symbolic, topological, and metric scene representations. However, typical 3DSGs contain hundreds of objects and symbols even for small environments; rendering task planning on the full graph impractical. We construct TASKOGRAPHY, the first large-scale robotic task planning benchmark over 3DSGs. While most benchmarking efforts in this area focus on vision-based planning, we systematically study symbolic planning, to decouple planning performance from visual representation learning. We observe that, among existing methods, neither classical nor learning-based planners are capable of real-time planning over full 3DSGs. Enabling real-time planning demands progress on both (a) sparsifying 3DSGs for tractable planning and (b) designing planners that better exploit 3DSG hierarchies. Towards the former goal, we propose SCRUB, a task-conditioned 3DSG sparsification method; enabling classical planners to match and in some cases surpass state-of-the-art learning-based planners. Towards the latter goal, we propose SEEK, a procedure enabling learning-based planners to exploit 3DSG structure, reducing the number of replanning queries required by current best approaches by an order of magnitude. We will open-source all code and baselines to spur further research along the intersections of robot task planning, learning and 3DSGs.
* Video: https://www.youtube.com/watch?v=mM4v5hP4LdA&ab_channel=KrishnaMurthy . Project page: https://taskography.github.io/ . 18 pages, 7 figures. In proceedings of Conference on Robot Learning (CoRL) 2021. The first two authors contributed equally
Learning to Search in Task and Motion Planning with Streams
Nov 25, 2021
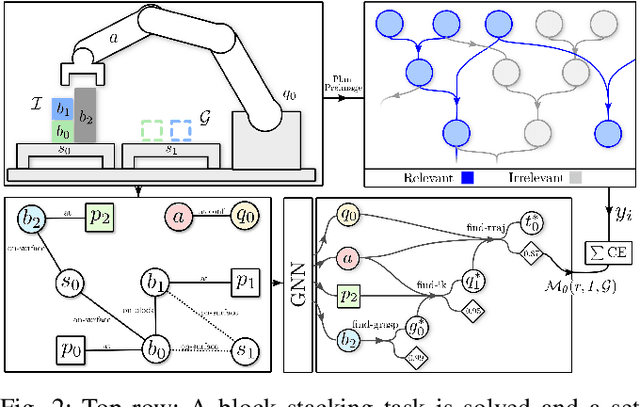
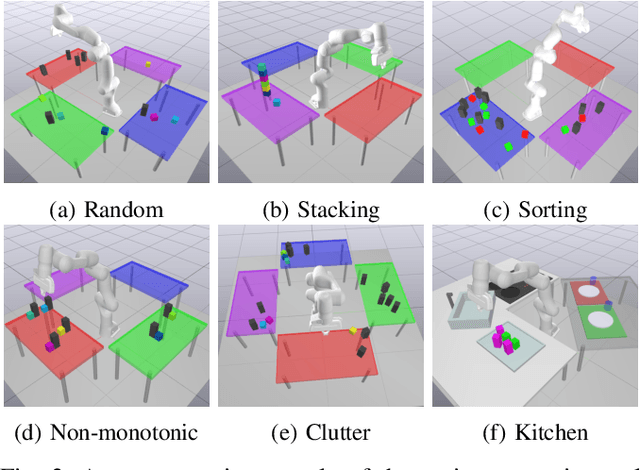
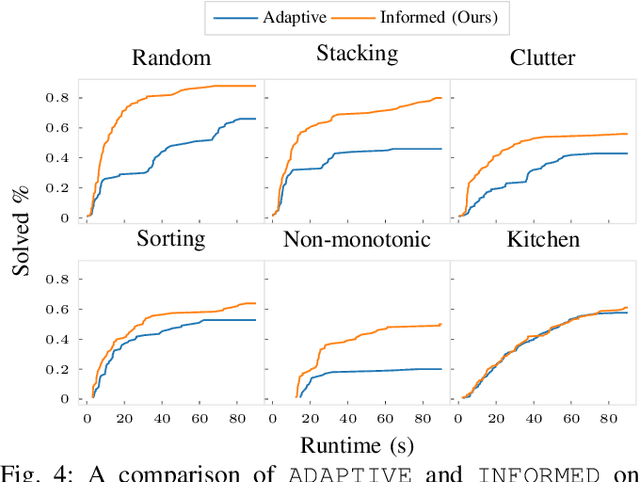
Task and motion planning problems in robotics typically combine symbolic planning over discrete task variables with motion optimization over continuous state and action variables, resulting in trajectories that satisfy the logical constraints imposed on the task variables. Symbolic planning can scale exponentially with the number of task variables, so recent works such as PDDLStream have focused on optimistic planning with an incrementally growing set of objects and facts until a feasible trajectory is found. However, this set is exhaustively and uniformly expanded in a breadth-first manner, regardless of the geometric structure of the problem at hand, which makes long-horizon reasoning with large numbers of objects prohibitively time-consuming. To address this issue, we propose a geometrically informed symbolic planner that expands the set of objects and facts in a best-first manner, prioritized by a Graph Neural Network based score that is learned from prior search computations. We evaluate our approach on a diverse set of problems and demonstrate an improved ability to plan in large or difficult scenarios. We also apply our algorithm on a 7DOF robotic arm in several block-stacking manipulation tasks.