 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTASKOGRAPHY: Evaluating robot task planning over large 3D scene graphs
Paper and Code
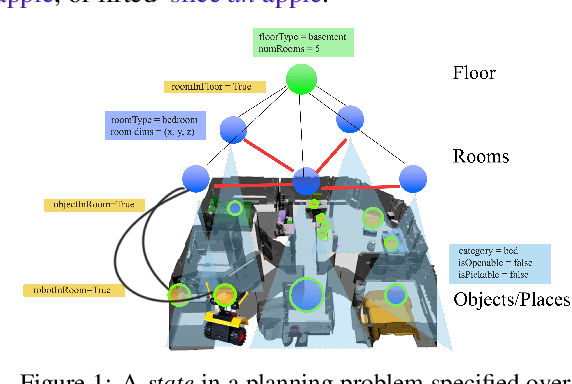
3D scene graphs (3DSGs) are an emerging description; unifying symbolic, topological, and metric scene representations. However, typical 3DSGs contain hundreds of objects and symbols even for small environments; rendering task planning on the full graph impractical. We construct TASKOGRAPHY, the first large-scale robotic task planning benchmark over 3DSGs. While most benchmarking efforts in this area focus on vision-based planning, we systematically study symbolic planning, to decouple planning performance from visual representation learning. We observe that, among existing methods, neither classical nor learning-based planners are capable of real-time planning over full 3DSGs. Enabling real-time planning demands progress on both (a) sparsifying 3DSGs for tractable planning and (b) designing planners that better exploit 3DSG hierarchies. Towards the former goal, we propose SCRUB, a task-conditioned 3DSG sparsification method; enabling classical planners to match and in some cases surpass state-of-the-art learning-based planners. Towards the latter goal, we propose SEEK, a procedure enabling learning-based planners to exploit 3DSG structure, reducing the number of replanning queries required by current best approaches by an order of magnitude. We will open-source all code and baselines to spur further research along the intersections of robot task planning, learning and 3DSGs.