 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline path planning for kinematic-constrained UAVs in a dynamic environment based on a Differential Evolution algorithm
Oct 24, 2024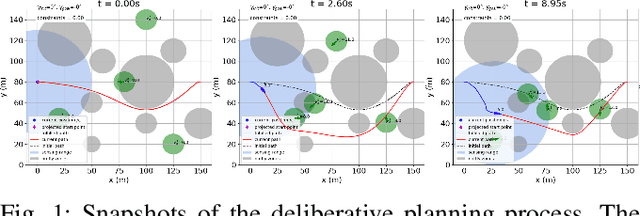
This research presents an online path planner for Unmanned Aerial Vehicles (UAVs) that can handle dynamic obstacles and UAV motion constraints, including maximum curvature and desired orientations. Our proposed planner uses a NURBS path representation and a Differential Evolution algorithm, incorporating concepts from the Velocity Obstacle approach in a constraint function. Initial results show that our approach is feasible and provides a foundation for future extensions to three-dimensional (3D) environments.
Forecasting in Non-stationary Environments with Fuzzy Time Series
Apr 27, 2020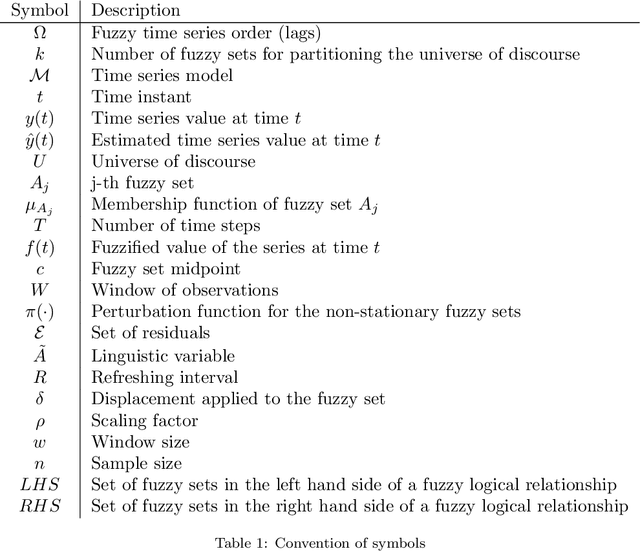

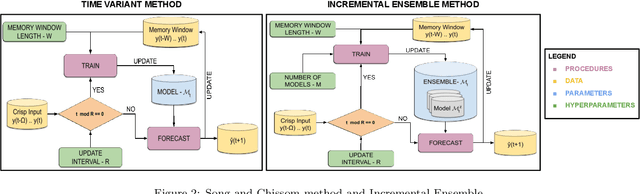

In this paper we introduce a Non-Stationary Fuzzy Time Series (NSFTS) method with time varying parameters adapted from the distribution of the data. In this approach, we employ Non-Stationary Fuzzy Sets, in which perturbation functions are used to adapt the membership function parameters in the knowledge base in response to statistical changes in the time series. The proposed method is capable of dynamically adapting its fuzzy sets to reflect the changes in the stochastic process based on the residual errors, without the need to retraining the model. This method can handle non-stationary and heteroskedastic data as well as scenarios with concept-drift. The proposed approach allows the model to be trained only once and remain useful long after while keeping reasonable accuracy. The flexibility of the method by means of computational experiments was tested with eight synthetic non-stationary time series data with several kinds of concept drifts, four real market indices (Dow Jones, NASDAQ, SP500 and TAIEX), three real FOREX pairs (EUR-USD, EUR-GBP, GBP-USD), and two real cryptocoins exchange rates (Bitcoin-USD and Ethereum-USD). As competitor models the Time Variant fuzzy time series and the Incremental Ensemble were used, these are two of the major approaches for handling non-stationary data sets. Non-parametric tests are employed to check the significance of the results. The proposed method shows resilience to concept drift, by adapting parameters of the model, while preserving the symbolic structure of the knowledge base.