 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline path planning for kinematic-constrained UAVs in a dynamic environment based on a Differential Evolution algorithm
Oct 24, 2024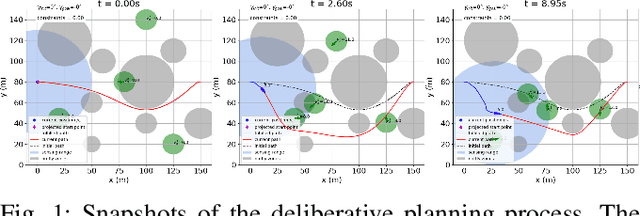
This research presents an online path planner for Unmanned Aerial Vehicles (UAVs) that can handle dynamic obstacles and UAV motion constraints, including maximum curvature and desired orientations. Our proposed planner uses a NURBS path representation and a Differential Evolution algorithm, incorporating concepts from the Velocity Obstacle approach in a constraint function. Initial results show that our approach is feasible and provides a foundation for future extensions to three-dimensional (3D) environments.
Autonomous Navigation System for a Delivery Drone
Jun 16, 2021



The use of delivery services is an increasing trend worldwide, further enhanced by the COVID pandemic. In this context, drone delivery systems are of great interest as they may allow for faster and cheaper deliveries. This paper presents a navigation system that makes feasible the delivery of parcels with autonomous drones. The system generates a path between a start and a final point and controls the drone to follow this path based on its localization obtained through GPS, 9DoF IMU, and barometer. In the landing phase, information of poses estimated by a marker (ArUco) detection technique using a camera, ultra-wideband (UWB) devices, and the drone's software estimation are merged by utilizing an Extended Kalman Filter algorithm to improve the landing precision. A vector field-based method controls the drone to follow the desired path smoothly, reducing vibrations or harsh movements that could harm the transported parcel. Real experiments validate the delivery strategy and allow to evaluate the performance of the adopted techniques. Preliminary results state the viability of our proposal for autonomous drone delivery.
Pose consensus based on dual quaternion algebra with application to decentralized formation control of mobile manipulators
Oct 21, 2018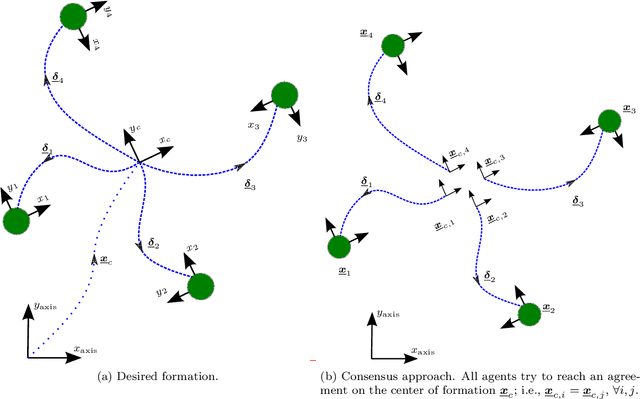
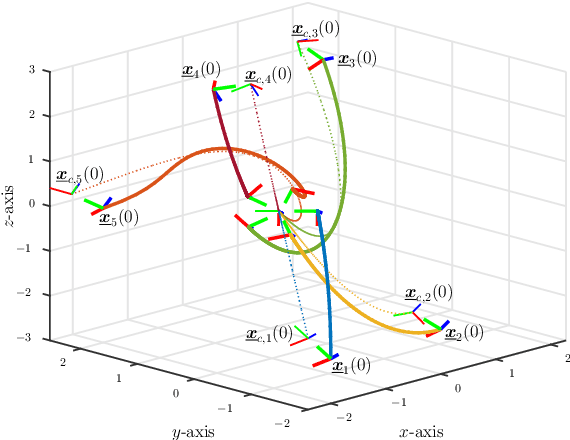
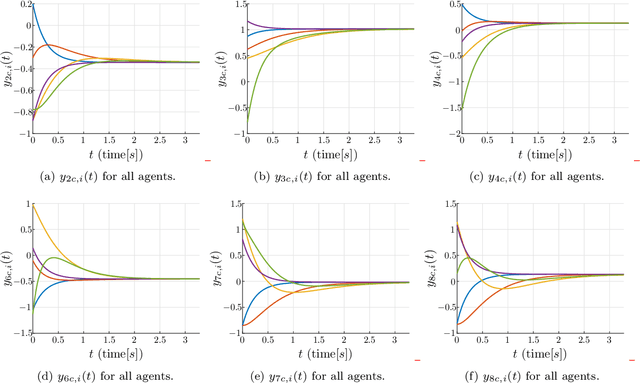
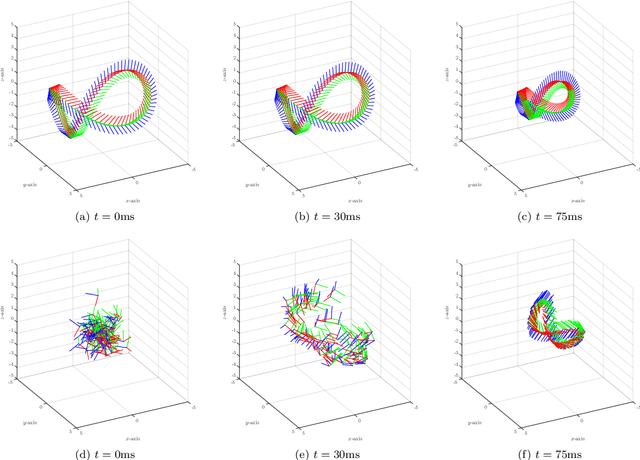
This paper presents a solution based on dual quaternion algebra to the general problem of pose (i.e., position and orientation) consensus for systems composed of multiple rigid-bodies. The dual quaternion algebra is used to model the agents' poses and also in the distributed control laws, making the proposed technique easily applicable to formation control of general robotic systems. The proposed pose consensus protocol has guaranteed convergence when the interaction among the agents is represented by directed graphs with directed spanning trees, which is a more general result when compared to the literature on formation control. In order to illustrate the proposed pose consensus protocol and its extension to the problem of formation control, we present a numerical simulation with a large number of free-flying agents and also an application of cooperative manipulation by using real mobile manipulators.