Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline path planning for kinematic-constrained UAVs in a dynamic environment based on a Differential Evolution algorithm
Paper and Code
Oct 24, 2024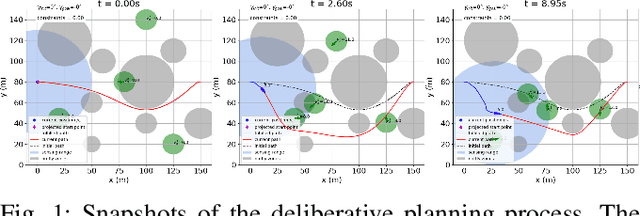
This research presents an online path planner for Unmanned Aerial Vehicles (UAVs) that can handle dynamic obstacles and UAV motion constraints, including maximum curvature and desired orientations. Our proposed planner uses a NURBS path representation and a Differential Evolution algorithm, incorporating concepts from the Velocity Obstacle approach in a constraint function. Initial results show that our approach is feasible and provides a foundation for future extensions to three-dimensional (3D) environments.
* Accepted to the 40th Anniversary of the IEEE Conference on Robotics
and Automation (ICRA@40)
View paper on