 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Heuristic Autonomous Exploration Method Based on Environmental Information Gain During Quadrotor Flight
Feb 21, 2023



Autonomous exploration is a widely studied fundamental application in the field of quadrotors, which requires them to automatically explore unknown space to obtain complete information about the environment. The frontier-based method, which is one of the representative works on autonomous exploration, drives autonomous determination by the definition of frontier information, so that complete information about the environment is available to the quadrotor. However, existing frontier-based methods are able to accomplish the task but still suffer from inefficient exploration. How to improve the efficiency of autonomous exploration is the focus of current research. Typical problems include slow frontier generation, which affects real-time viewpoint determination, and insufficient determination methods that affect the quality of viewpoints. Therefore, to overcome these problems, this paper proposes a two-level viewpoint determination method for frontier-based autonomous exploration. Firstly, a sampling-based frontier detection method is presented for faster frontier generation, which improves the immediacy of environmental representation compared to traditional traversal-based methods. Secondly, we consider the access to environmental information during flight for the first time and design an innovative heuristic evaluation function to decide on a high-quality viewpoint as the next local navigation target in each exploration iteration. We conducted extensive benchmark and real-world tests to validate our method. The results confirm that our method optimizes the frontier search time by 85%, the exploration time by around 20-30%, and the exploration path by 25-35%.
Geometry-Based Stochastic Probability Models for the LoS and NLoS Paths of A2G Channels under Urban Scenario
May 19, 2022



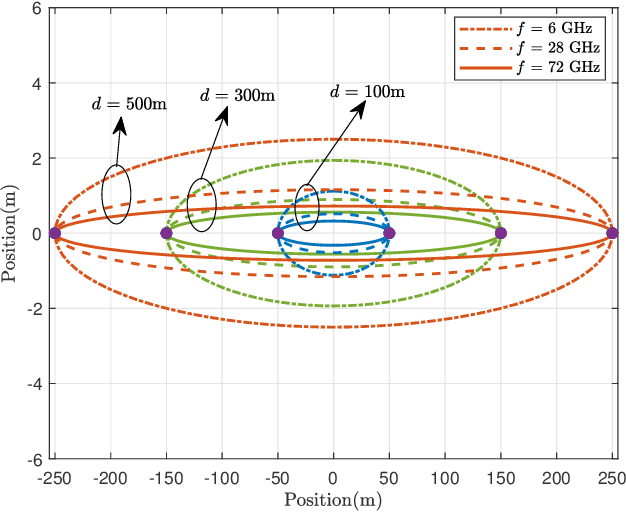
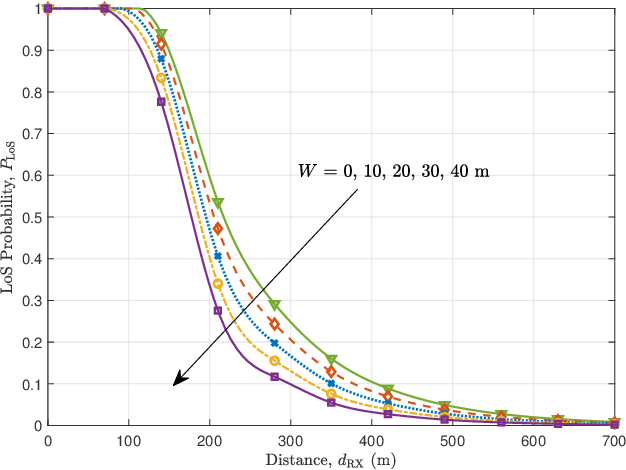
Path probability prediction is essential to describe the dynamic birth and death of propagation paths, and build the accurate channel model for air-to-ground (A2G) communications. The occurrence probability of each path is complex and time-variant due to fast changeable altitudes of UAVs and scattering environments. Considering the A2G channels under urban scenarios, this paper presents three novel stochastic probability models for the line-of-sight (LoS) path, ground specular (GS) path, and building-scattering (BS) path, respectively. By analyzing the geometric stochastic information of three-dimensional (3D) scattering environments, the proposed models are derived with respect to the width, height, and distribution of buildings. The effect of Fresnel zone and altitudes of transceivers are also taken into account. Simulation results show that the proposed LoS path probability model has good performance at different frequencies and altitudes, and is also consistent with existing models at the low or high altitude. Moreover, the proposed LoS and NLoS path probability models show good agreement with the ray-tracing (RT) simulation method.
Height-Dependent LoS Probability Model for A2G MmWave Communications under Built-up Scenarios
Sep 06, 2021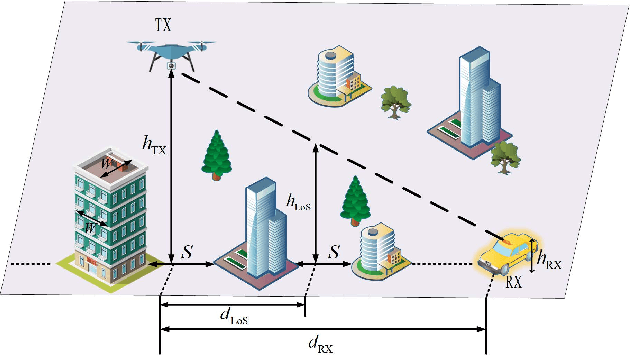
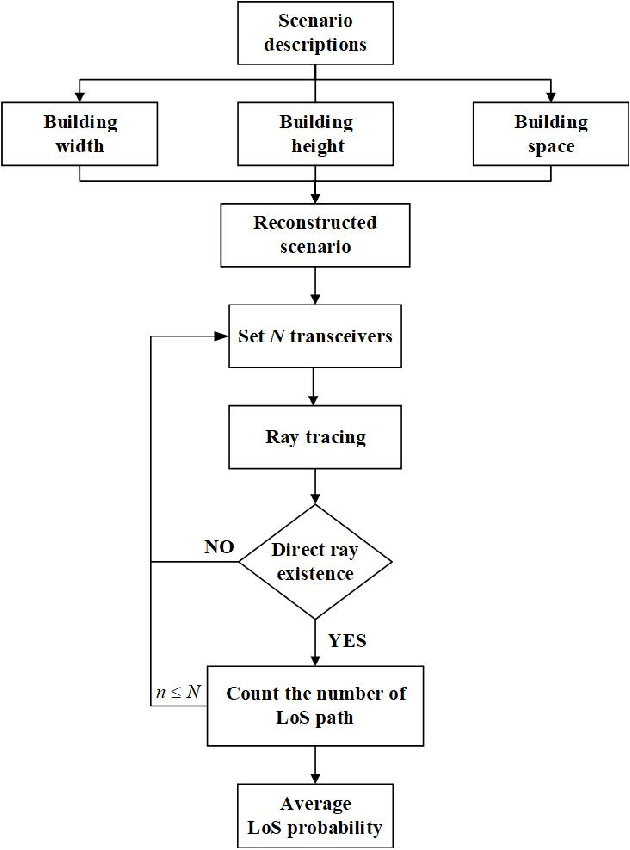
Based on the three-dimensional propagation characteristic under built-up scenarios, a height-dependent line-of-sight (LoS) probability model for air-to-ground (A2G) millimeter wave (mmWave) communications is proposed in this paper. With comprehensive considerations of scenario factors, i.e., building height distribution, building width, building space, and the heights of transceivers, this paper upgrades the prediction method of International Telecommunication Union-Radio (ITU-R) standard to both low altitude and high altitude cases. In order to speed up the LoS probability prediction, an approximate parametric model is also developed based on the theoretical expression. The simulation results based on ray-tracing (RT) method show that the proposed model has good consistency with existing models at the low altitude. However, it has better performance at the high altitude. The new model can be used for the A2G channel modeling and performance analysis such as cell coverage, outage probability, and bit error rate of A2G communication systems.
Geometry-Based Stochastic Line-of-Sight Probability Model for A2G Channels under Urban Scenarios
Sep 06, 2021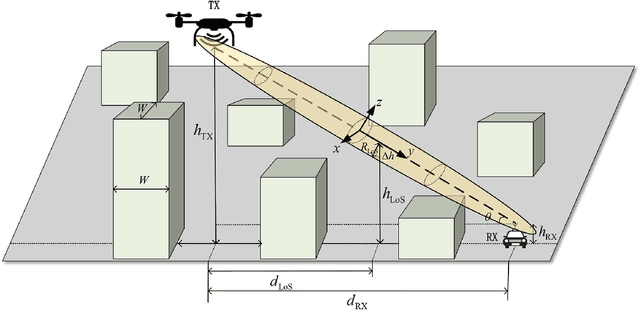
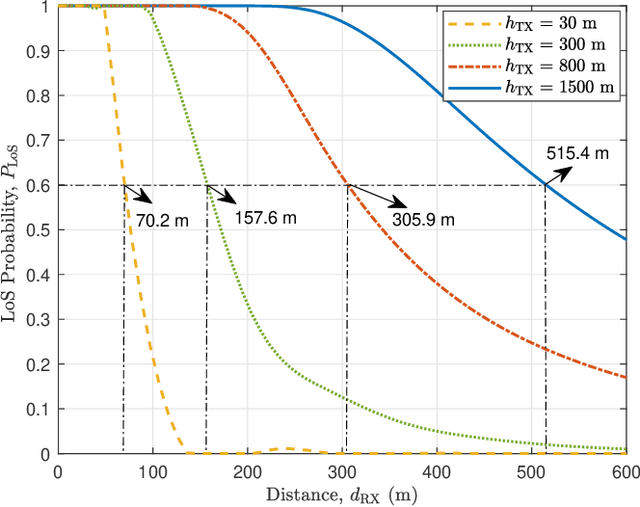
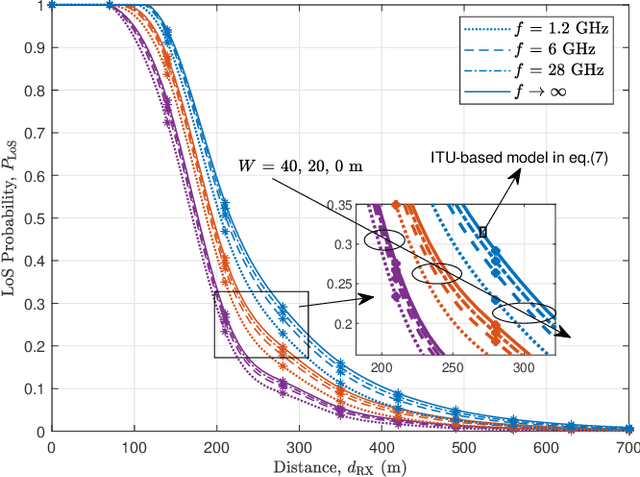
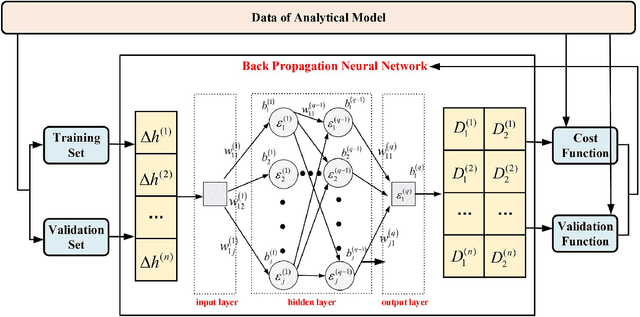
Line-of-sight (LoS) path is essential for the reliability of air-to-ground (A2G) communications, but the existence of LoS path is difficult to predict due to random obstacles on the ground. Based on the statistical geographic information and Fresnel clearance zone, a general stochastic LoS probability model for three-dimensional (3D) A2G channels under urban scenarios is developed. By considering the factors, i.e., building height distribution, building width, building space, carrier frequency, and transceiver's heights, the proposed model is suitable for different frequencies and altitudes. Moreover, in order to get a closed-form expression and reduce the computational complexity, an approximate parametric model is also built with the machine-learning (ML) method to estimate model parameters. The simulation results show that the proposed model has good consistency with existing models at the low altitude. When the altitude increases, it has better performance by comparing with that of the ray-tracing Monte-Carlo simulation data. The analytical results of proposed model are helpful for the channel modeling and performance analysis such as cell coverage, outage probability, and bit error rate in A2G communications.