 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioLLMAgent: A Hybrid Framework with Enhanced Structural Interpretability for Simulating Human Decision-Making in Computational Psychiatry
Mar 05, 2026Computational psychiatry faces a fundamental trade-off: traditional reinforcement learning (RL) models offer interpretability but lack behavioral realism, while large language model (LLM) agents generate realistic behaviors but lack structural interpretability. We introduce BioLLMAgent, a novel hybrid framework that combines validated cognitive models with the generative capabilities of LLMs. The framework comprises three core components: (i) an Internal RL Engine for experience-driven value learning; (ii) an External LLM Shell for high-level cognitive strategies and therapeutic interventions; and (iii) a Decision Fusion Mechanism for integrating components via weighted utility. Comprehensive experiments on the Iowa Gambling Task (IGT) across six clinical and healthy datasets demonstrate that BioLLMAgent accurately reproduces human behavioral patterns while maintaining excellent parameter identifiability (correlations $>0.67$). Furthermore, the framework successfully simulates cognitive behavioral therapy (CBT) principles and reveals, through multi-agent dynamics, that community-wide educational interventions may outperform individual treatments. Validated across reward-punishment learning and temporal discounting tasks, BioLLMAgent provides a structurally interpretable "computational sandbox" for testing mechanistic hypotheses and intervention strategies in psychiatric research.
Agentic AI Empowered Intent-Based Networking for 6G
Jan 10, 2026The transition towards sixth-generation (6G) wireless networks necessitates autonomous orchestration mechanisms capable of translating high-level operational intents into executable network configurations. Existing approaches to Intent-Based Networking (IBN) rely upon either rule-based systems that struggle with linguistic variation or end-to-end neural models that lack interpretability and fail to enforce operational constraints. This paper presents a hierarchical multi-agent framework where Large Language Model (LLM) based agents autonomously decompose natural language intents, consult domain-specific specialists, and synthesise technically feasible network slice configurations through iterative reasoning-action (ReAct) cycles. The proposed architecture employs an orchestrator agent coordinating two specialist agents, i.e., Radio Access Network (RAN) and Core Network agents, via ReAct-style reasoning, grounded in structured network state representations. Experimental evaluation across diverse benchmark scenarios shows that the proposed system outperforms rule-based systems and direct LLM prompting, with architectural principles applicable to Open RAN (O-RAN) deployments. The results also demonstrate that whilst contemporary LLMs possess general telecommunications knowledge, network automation requires careful prompt engineering to encode context-dependent decision thresholds, advancing autonomous orchestration capabilities for next-generation wireless systems.
Geometry-Based Stochastic Line-of-Sight Probability Model for A2G Channels under Urban Scenarios
Sep 06, 2021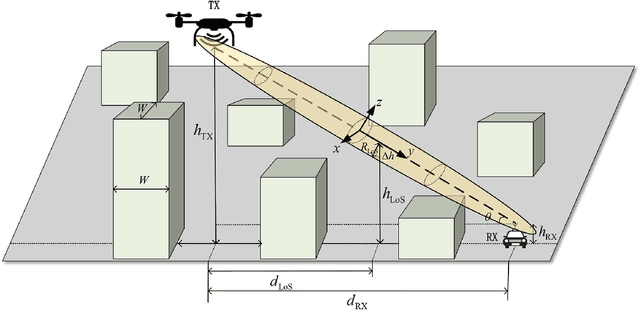
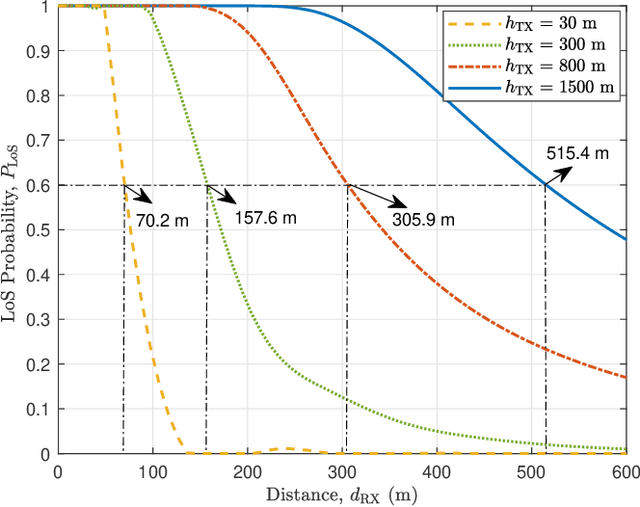
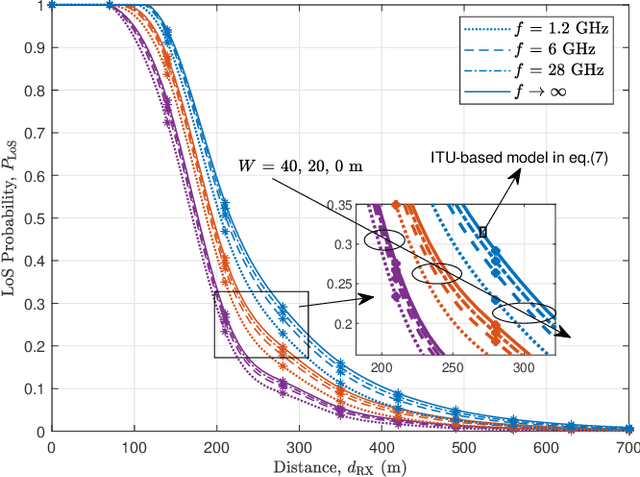
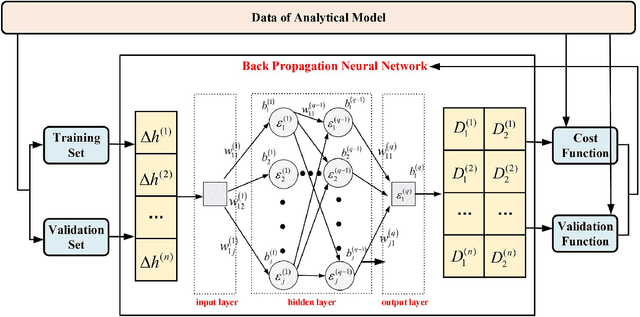
Line-of-sight (LoS) path is essential for the reliability of air-to-ground (A2G) communications, but the existence of LoS path is difficult to predict due to random obstacles on the ground. Based on the statistical geographic information and Fresnel clearance zone, a general stochastic LoS probability model for three-dimensional (3D) A2G channels under urban scenarios is developed. By considering the factors, i.e., building height distribution, building width, building space, carrier frequency, and transceiver's heights, the proposed model is suitable for different frequencies and altitudes. Moreover, in order to get a closed-form expression and reduce the computational complexity, an approximate parametric model is also built with the machine-learning (ML) method to estimate model parameters. The simulation results show that the proposed model has good consistency with existing models at the low altitude. When the altitude increases, it has better performance by comparing with that of the ray-tracing Monte-Carlo simulation data. The analytical results of proposed model are helpful for the channel modeling and performance analysis such as cell coverage, outage probability, and bit error rate in A2G communications.
Map-based Channel Modeling and Generation for U2V mmWave Communication
Apr 08, 2021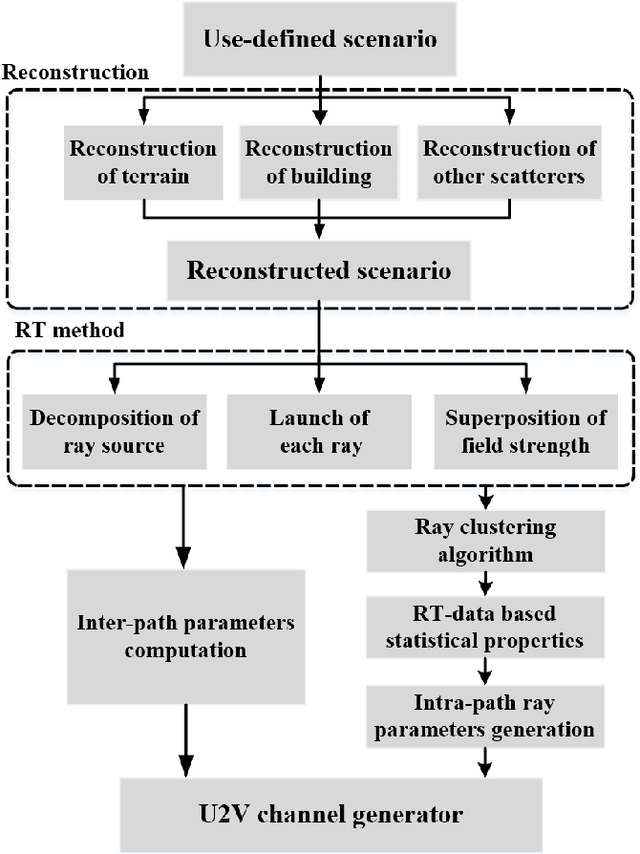
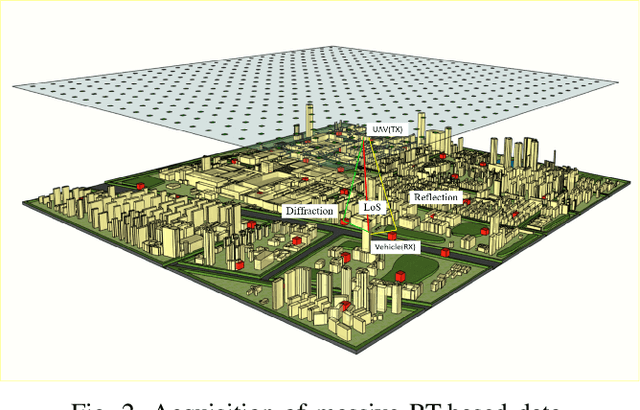
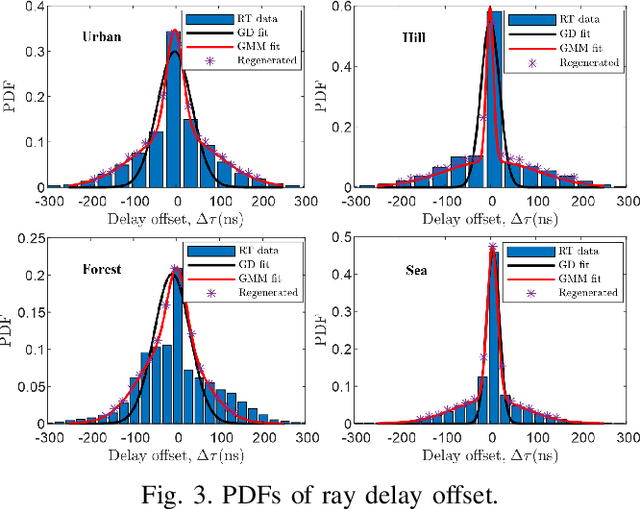
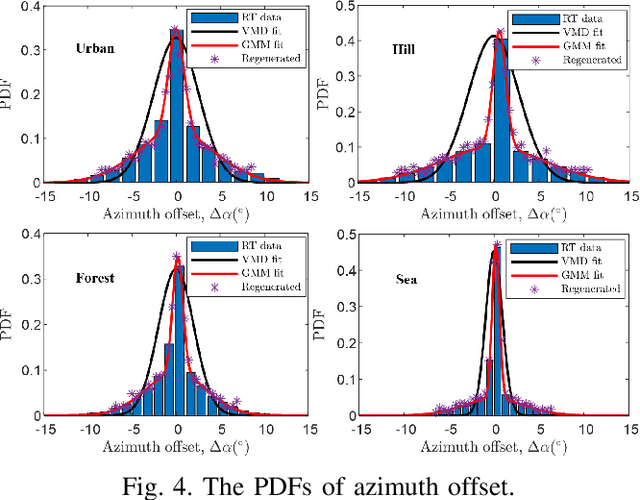
Unmanned aerial vehicle (UAV) aided millimeter wave (mmWave) technologies have a promising prospect in the future communication networks. By considering the factors of three-dimensional (3D) scattering space, 3D trajectory, and 3D antenna array, a non-stationary channel model for UAV-to-vehicle (U2V) mmWave communications is proposed. The computation and generation methods of channel parameters including interpath and intra-path are analyzed in detail. The inter-path parameters are calculated in a deterministic way, while the parameters of intra-path rays are generated in a stochastic way. The statistical properties are obtained by using a Gaussian mixture model (GMM) on the massive ray tracing (RT) data. Then, a modified method of equal areas (MMEA) is developed to generate the random intra-path variables. Meanwhile, to reduce the complexity of RT method, the 3D propagation space is reconstructed based on the user-defined digital map. The simulated and analyzed results show that the proposed model and generation method can reproduce non-stationary U2V channels in accord with U2V scenarios. The generated statistical properties are consistent with the theoretical and measured ones as well.
Private and Utility Enhanced Recommendations with Local Differential Privacy and Gaussian Mixture Model
Mar 06, 2021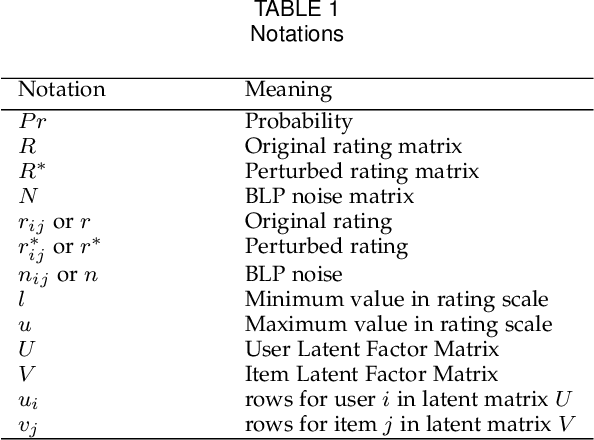
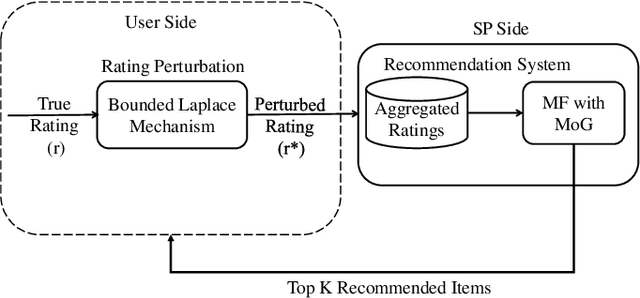
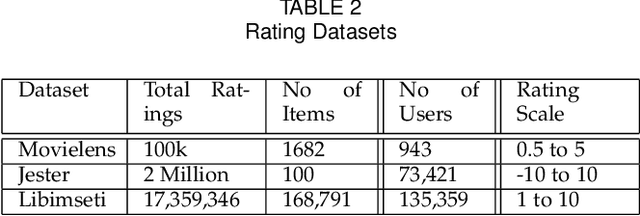
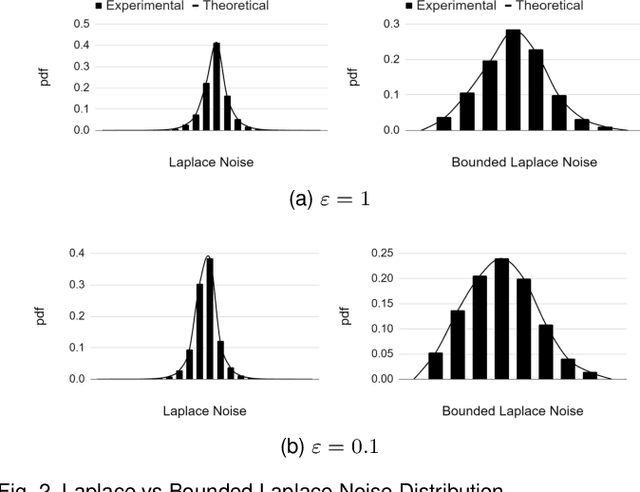
Recommendation systems rely heavily on users behavioural and preferential data (e.g. ratings, likes) to produce accurate recommendations. However, users experience privacy concerns due to unethical data aggregation and analytical practices carried out by the Service Providers (SP). Local differential privacy (LDP) based perturbation mechanisms add noise to users data at user side before sending it to the SP. The SP then uses the perturbed data to perform recommendations. Although LDP protects the privacy of users from SP, it causes a substantial decline in predictive accuracy. To address this issue, we propose an LDP-based Matrix Factorization (MF) with a Gaussian Mixture Model (MoG). The LDP perturbation mechanism, Bounded Laplace (BLP), regulates the effect of noise by confining the perturbed ratings to a predetermined domain. We derive a sufficient condition of the scale parameter for BLP to satisfy $\epsilon$ LDP. At the SP, The MoG model estimates the noise added to perturbed ratings and the MF algorithm predicts missing ratings. Our proposed LDP based recommendation system improves the recommendation accuracy without violating LDP principles. The empirical evaluations carried out on three real world datasets, i.e., Movielens, Libimseti and Jester, demonstrate that our method offers a substantial increase in predictive accuracy under strong privacy guarantee.