 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTau-BNO: Brain Neural Operator for Tau Transport Model
Mar 09, 2026Mechanistic modeling provides a biophysically grounded framework for studying the spread of pathological tau protein in tauopathies like Alzheimer's disease. Existing approaches typically model tau propagation as a diffusive process on the brain's structural connectome, reproducing macroscopic patterns but neglecting microscale cellular transport and reaction mechanisms. The Network Transport Model (NTM) was introduced to fill this gap, explaining how region-level progression of tau emerges from microscale biophysical processes. However, the NTM faces a common challenge for complex models defined by large systems of partial differential equations: the inability to perform parameter inference and mechanistic discovery due to high computational burden and slow model simulations. To overcome this barrier, we propose Tau-BNO, a Brain Neural Operator surrogate framework for rapidly approximating NTM dynamics that captures both intra-regional reaction kinetics and inter-regional network transport. Tau-BNO combines a function operator that encodes kinetic parameters with a query operator that preserves initial state information, while approximating anisotropic transport through a spectral kernel that retains directionality. Empirical evaluations demonstrate high predictive accuracy ($R^2\approx$ 0.98) across diverse biophysical regimes and an 89\% performance improvement over state-of-the-art sequence models like Transformers and Mamba, which lack inherent structural priors. By reducing simulation time from hours to seconds, we show that the surrogate model is capable of producing new insights and generating new hypotheses. This framework is readily extensible to a broader class of connectome-based biophysical models, showcasing the transformative value of deep learning surrogates to accelerate analysis of large-scale, computationally intensive dynamical systems.
Catastrophic Forgetting in Kolmogorov-Arnold Networks
Nov 16, 2025Catastrophic forgetting is a longstanding challenge in continual learning, where models lose knowledge from earlier tasks when learning new ones. While various mitigation strategies have been proposed for Multi-Layer Perceptrons (MLPs), recent architectural advances like Kolmogorov-Arnold Networks (KANs) have been suggested to offer intrinsic resistance to forgetting by leveraging localized spline-based activations. However, the practical behavior of KANs under continual learning remains unclear, and their limitations are not well understood. To address this, we present a comprehensive study of catastrophic forgetting in KANs and develop a theoretical framework that links forgetting to activation support overlap and intrinsic data dimension. We validate these analyses through systematic experiments on synthetic and vision tasks, measuring forgetting dynamics under varying model configurations and data complexity. Further, we introduce KAN-LoRA, a novel adapter design for parameter-efficient continual fine-tuning of language models, and evaluate its effectiveness in knowledge editing tasks. Our findings reveal that while KANs exhibit promising retention in low-dimensional algorithmic settings, they remain vulnerable to forgetting in high-dimensional domains such as image classification and language modeling. These results advance the understanding of KANs' strengths and limitations, offering practical insights for continual learning system design.
SEED-GRPO: Semantic Entropy Enhanced GRPO for Uncertainty-Aware Policy Optimization
May 18, 2025Large language models (LLMs) exhibit varying levels of confidence across input prompts (questions): some lead to consistent, semantically similar answers, while others yield diverse or contradictory outputs. This variation reflects LLM's uncertainty about the input prompt, a signal of how confidently the model understands a given problem. However, vanilla Group Relative Policy Optimization (GRPO) treats all prompts equally during policy updates, ignoring this important information about the model's knowledge boundaries. To address this limitation, we propose SEED-GRPO (Semantic Entropy EnhanceD GRPO), which explicitly measures LLMs' uncertainty of the input prompts semantic entropy. Semantic entropy measures the diversity of meaning in multiple generated answers given a prompt and uses this to modulate the magnitude of policy updates. This uncertainty-aware training mechanism enables dynamic adjustment of policy update magnitudes based on question uncertainty. It allows more conservative updates on high-uncertainty questions while maintaining the original learning signal on confident ones. Experimental results on five mathematical reasoning benchmarks (AIME24 56.7, AMC 68.7, MATH 83.4, Minerva 34.2, and OlympiadBench 48.0) demonstrate that SEED-GRPO achieves new state-of-the-art performance in average accuracy, validating the effectiveness of uncertainty-aware policy optimization.
Fourier-enhanced Neural Networks For Systems Biology Applications
Feb 10, 2025In the field of systems biology, differential equations are commonly used to model biological systems, but solving them for large-scale and complex systems can be computationally expensive. Recently, the integration of machine learning and mathematical modeling has offered new opportunities for scientific discoveries in biology and health. The emerging physics-informed neural network (PINN) has been proposed as a solution to this problem. However, PINN can be computationally expensive and unreliable for complex biological systems. To address these issues, we propose the Fourier-enhanced Neural Networks for systems biology (SB-FNN). SB-FNN uses an embedded Fourier neural network with an adaptive activation function and a cyclic penalty function to optimize the prediction of biological dynamics, particularly for biological systems that exhibit oscillatory patterns. Experimental results demonstrate that SB-FNN achieves better performance and is more efficient than PINN for handling complex biological models. Experimental results on cellular and population models demonstrate that SB-FNN outperforms PINN in both accuracy and efficiency, making it a promising alternative approach for handling complex biological models. The proposed method achieved better performance on six biological models and is expected to replace PINN as the most advanced method in systems biology.
Hydra-SGG: Hybrid Relation Assignment for One-stage Scene Graph Generation
Sep 16, 2024



DETR introduces a simplified one-stage framework for scene graph generation (SGG). However, DETR-based SGG models face two challenges: i) Sparse supervision, as each image typically contains fewer than 10 relation annotations, while the models employ over 100 relation queries. This sparsity arises because each ground truth relation is assigned to only one single query during training. ii) False negative samples, since one ground truth relation may have multiple queries with similar matching scores. These suboptimally matched queries are simply treated as negative samples, causing the loss of valuable supervisory signals. As a response, we devise Hydra-SGG, a one-stage SGG method that adopts a new Hybrid Relation Assignment. This assignment combines a One-to-One Relation Assignment with a newly introduced IoU-based One-to-Many Relation Assignment. Specifically, each ground truth is assigned to multiple relation queries with high IoU subject-object boxes. This Hybrid Relation Assignment increases the number of positive training samples, alleviating sparse supervision. Moreover, we, for the first time, empirically show that self-attention over relation queries helps reduce duplicated relation predictions. We, therefore, propose Hydra Branch, a parameter-sharing auxiliary decoder without a self-attention layer. This design promotes One-to-Many Relation Assignment by enabling different queries to predict the same relation. Hydra-SGG achieves state-of-the-art performance with 10.6 mR@20 and 16.0 mR@50 on VG150, while only requiring 12 training epochs. It also sets a new state-of-the-art on Open Images V6 and and GQA.
UAHOI: Uncertainty-aware Robust Interaction Learning for HOI Detection
Aug 14, 2024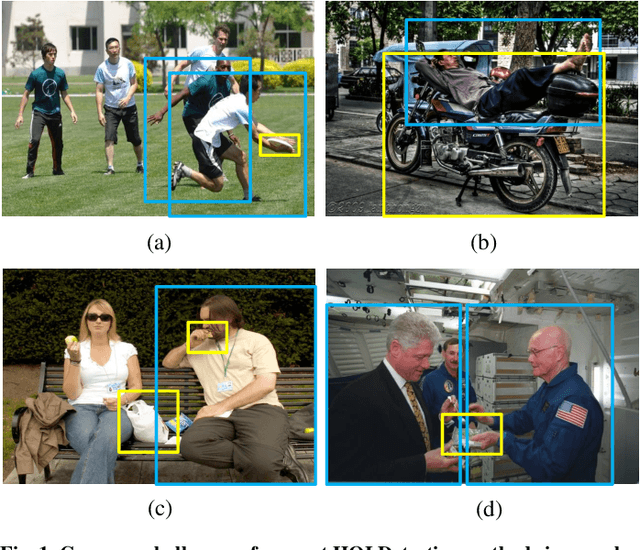
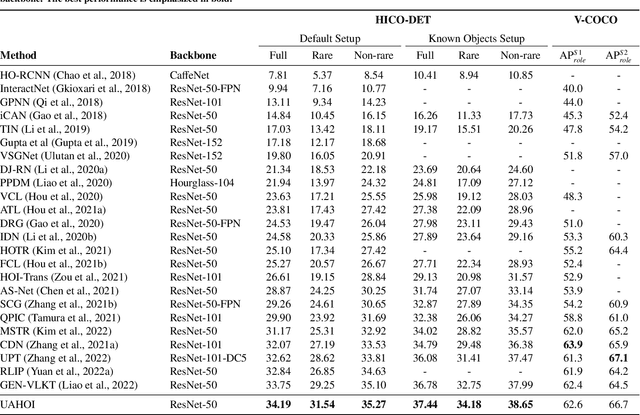
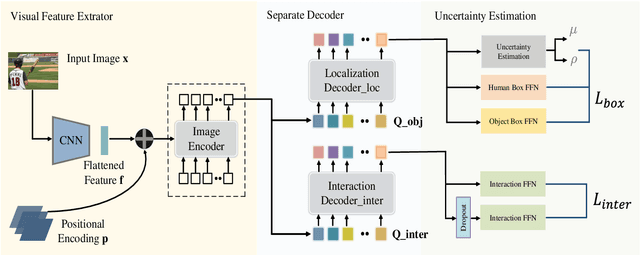
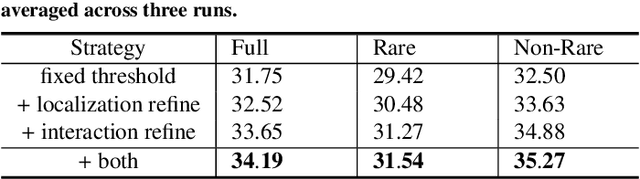
This paper focuses on Human-Object Interaction (HOI) detection, addressing the challenge of identifying and understanding the interactions between humans and objects within a given image or video frame. Spearheaded by Detection Transformer (DETR), recent developments lead to significant improvements by replacing traditional region proposals by a set of learnable queries. However, despite the powerful representation capabilities provided by Transformers, existing Human-Object Interaction (HOI) detection methods still yield low confidence levels when dealing with complex interactions and are prone to overlooking interactive actions. To address these issues, we propose a novel approach \textsc{UAHOI}, Uncertainty-aware Robust Human-Object Interaction Learning that explicitly estimates prediction uncertainty during the training process to refine both detection and interaction predictions. Our model not only predicts the HOI triplets but also quantifies the uncertainty of these predictions. Specifically, we model this uncertainty through the variance of predictions and incorporate it into the optimization objective, allowing the model to adaptively adjust its confidence threshold based on prediction variance. This integration helps in mitigating the adverse effects of incorrect or ambiguous predictions that are common in traditional methods without any hand-designed components, serving as an automatic confidence threshold. Our method is flexible to existing HOI detection methods and demonstrates improved accuracy. We evaluate \textsc{UAHOI} on two standard benchmarks in the field: V-COCO and HICO-DET, which represent challenging scenarios for HOI detection. Through extensive experiments, we demonstrate that \textsc{UAHOI} achieves significant improvements over existing state-of-the-art methods, enhancing both the accuracy and robustness of HOI detection.
Neural Symbolic Regression using Control Variables
Jun 07, 2023Symbolic regression (SR) is a powerful technique for discovering the analytical mathematical expression from data, finding various applications in natural sciences due to its good interpretability of results. However, existing methods face scalability issues when dealing with complex equations involving multiple variables. To address this challenge, we propose SRCV, a novel neural symbolic regression method that leverages control variables to enhance both accuracy and scalability. The core idea is to decompose multi-variable symbolic regression into a set of single-variable SR problems, which are then combined in a bottom-up manner. The proposed method involves a four-step process. First, we learn a data generator from observed data using deep neural networks (DNNs). Second, the data generator is used to generate samples for a certain variable by controlling the input variables. Thirdly, single-variable symbolic regression is applied to estimate the corresponding mathematical expression. Lastly, we repeat steps 2 and 3 by gradually adding variables one by one until completion. We evaluate the performance of our method on multiple benchmark datasets. Experimental results demonstrate that the proposed SRCV significantly outperforms state-of-the-art baselines in discovering mathematical expressions with multiple variables. Moreover, it can substantially reduce the search space for symbolic regression. The source code will be made publicly available upon publication.
Pathology Steered Stratification Network for Subtype Identification in Alzheimer's Disease
Oct 12, 2022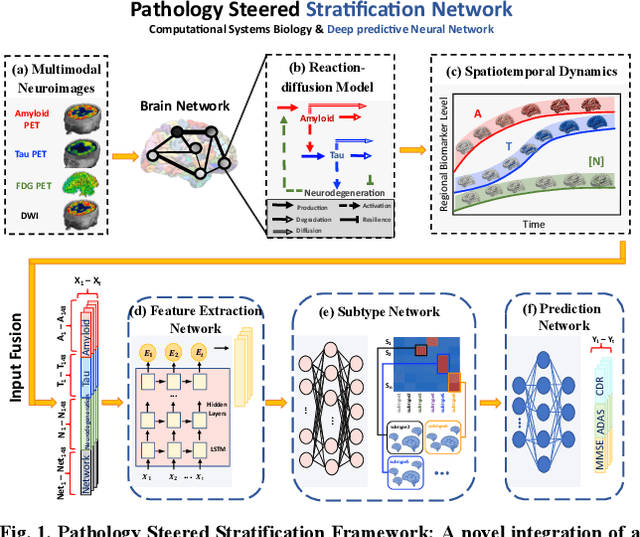
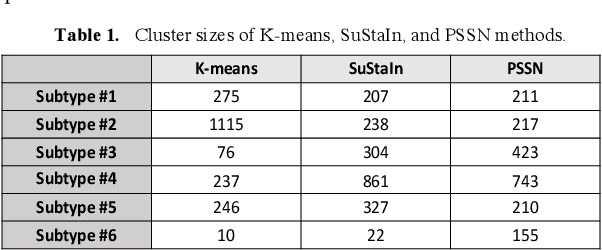
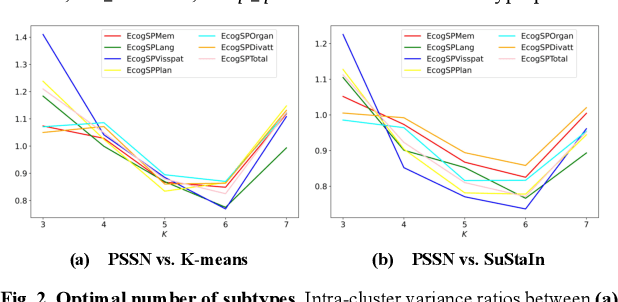
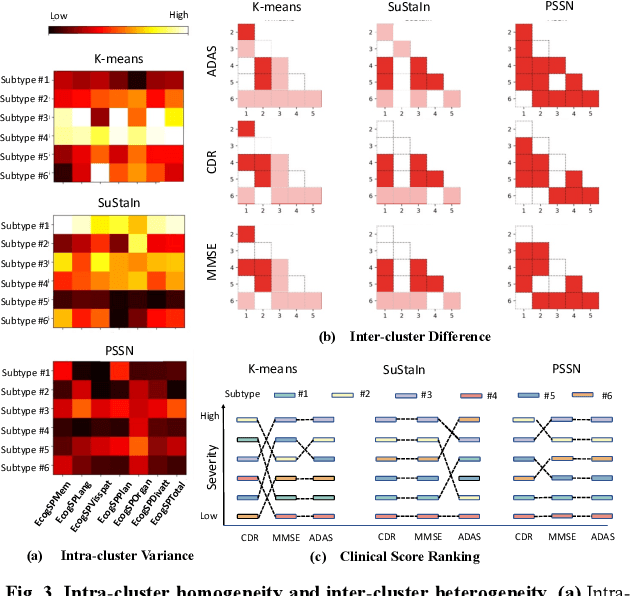
Alzheimer's disease (AD) is a heterogeneous, multifactorial neurodegenerative disorder characterized by beta-amyloid, pathologic tau, and neurodegeneration. The massive heterogeneity between neurobiological examinations and clinical assessment is the current biggest challenge in the early diagnosis of Alzheimer's disease, urging for a comprehensive stratification of the aging population that is defined by reliable neurobiological biomarkers and closely associated with clinical outcomes. However, existing statistical inference approaches in neuroimaging studies of AD subtype identification fail to take into account the neuropathological domain knowledge, which could lead to ill-posed results that are sometimes inconsistent with neurological principles. To fill this knowledge gap, we propose a novel pathology steered stratification network (PSSN) that integrates mainstream AD pathology with multimodal longitudinal neuroimaging data to categorize the aging population. By combining theory-based biological modeling and data-driven deep learning, this cross-disciplinary approach can not only generate long-term biomarker prediction consistent with the end-state of individuals but also stratifies subjects into fine-grained subtypes with distinct neurological underpinnings, where ag-ing brains within the same subtype share com-mon biological behaviors that emerge as similar trajectories of cognitive decline. Our stratification outperforms K-means and SuStaIn in both inter-cluster heterogeneity and intra-cluster homogeneity of various clinical scores. Importantly, we identify six subtypes spanning AD spectrum, where each subtype exhibits a distinctive biomarker pattern that is consistent with its clinical outcome. A disease evolutionary graph is further provided by quantifying subtype transition probabilities, which may assist pre-symptomatic diagnosis and guide therapeutic treatments.
Design and Implementation of A Novel Precision Irrigation Robot Based on An Intelligent Path Planning Algorithm
Mar 02, 2020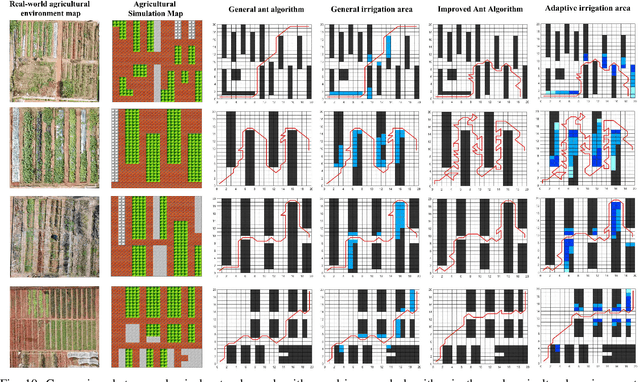
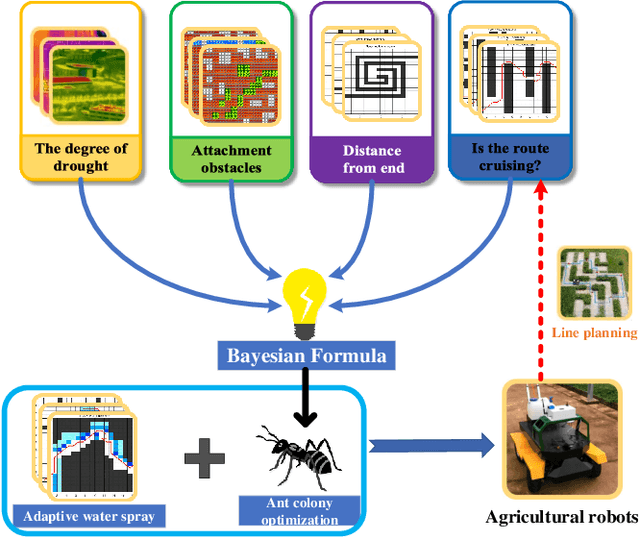
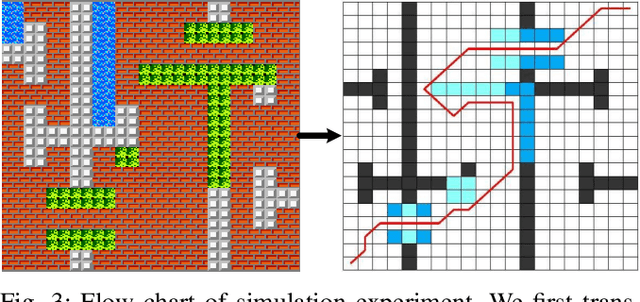
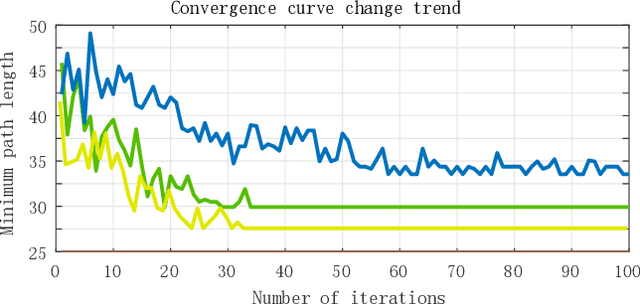
The agricultural irrigation system is closely related to agricultural production. There are some problems in nowadays agricultural irrigation system, such as poor mobility, imprecision and high price. To address these issues, an intelligent irrigation robot is designed and implemented in this work. The robot achieves precise irrigation by the irrigation path planning algorithm which is improved by Bayesian theory. In the proposed algorithm, we utilize as much information as possible to achieve full coverage irrigation in the complex agricultural environment. Besides, we propose the maximum risk to avoid the problem of lack of inspection in certain areas. Finally, We carried out simulation experiments and field experiments to verify the robot and the algorithm. The experimental results indicate that the robot is capable of fulfilling the requirements of various agricultural irrigation tasks.