 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Implementation of A Novel Precision Irrigation Robot Based on An Intelligent Path Planning Algorithm
Paper and Code
Mar 02, 2020
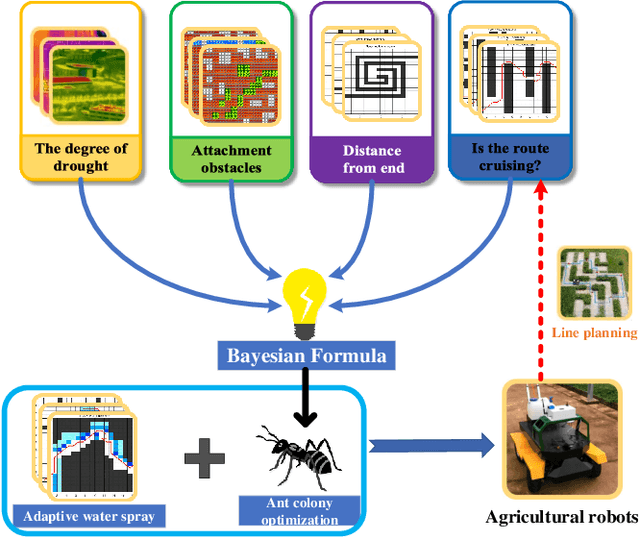
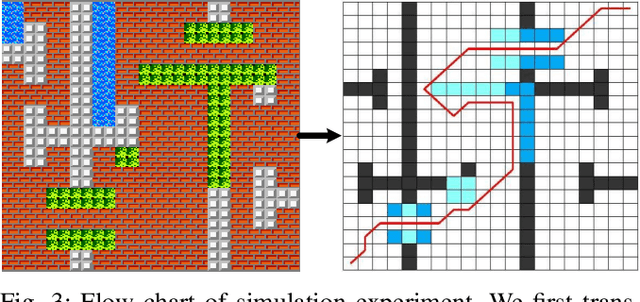
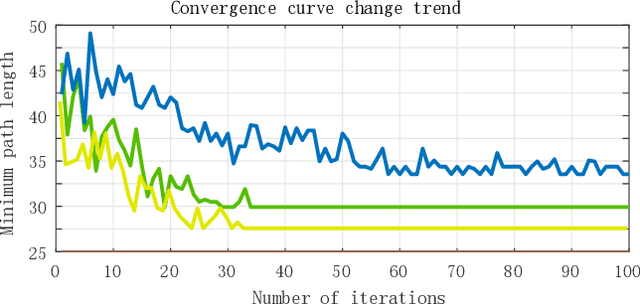
The agricultural irrigation system is closely related to agricultural production. There are some problems in nowadays agricultural irrigation system, such as poor mobility, imprecision and high price. To address these issues, an intelligent irrigation robot is designed and implemented in this work. The robot achieves precise irrigation by the irrigation path planning algorithm which is improved by Bayesian theory. In the proposed algorithm, we utilize as much information as possible to achieve full coverage irrigation in the complex agricultural environment. Besides, we propose the maximum risk to avoid the problem of lack of inspection in certain areas. Finally, We carried out simulation experiments and field experiments to verify the robot and the algorithm. The experimental results indicate that the robot is capable of fulfilling the requirements of various agricultural irrigation tasks.