 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Optimization Strategies to Design an Underactuated Hand Exoskeleton
Aug 14, 2024Exoskeletons can boost human strength and provide assistance to individuals with physical disabilities. However, ensuring safety and optimal performance in their design poses substantial challenges. This study presents the design process for an underactuated hand exoskeleton (U-HEx), first including a single objective (maximizing force transmission), then expanding into multi objective (also minimizing torque variance and actuator displacement). The optimization relies on a Genetic Algorithm, the Big Bang-Big Crunch Algorithm, and their versions for multi-objective optimization. Analyses revealed that using Big Bang-Big Crunch provides high and more consistent results in terms of optimality with lower convergence time. In addition, adding more objectives offers a variety of trade-off solutions to the designers, who might later set priorities for the objectives without repeating the process - at the cost of complicating the optimization algorithm and computational burden. These findings underline the importance of performing proper optimization while designing exoskeletons, as well as providing a significant improvement to this specific robotic design.
The Impact of Evolutionary Computation on Robotic Design: A Case Study with an Underactuated Hand Exoskeleton
Mar 23, 2024Robotic exoskeletons can enhance human strength and aid people with physical disabilities. However, designing them to ensure safety and optimal performance presents significant challenges. Developing exoskeletons should incorporate specific optimization algorithms to find the best design. This study investigates the potential of Evolutionary Computation (EC) methods in robotic design optimization, with an underactuated hand exoskeleton (U-HEx) used as a case study. We propose improving the performance and usability of the U-HEx design, which was initially optimized using a naive brute-force approach, by integrating EC techniques such as Genetic Algorithm and Big Bang-Big Crunch Algorithm. Comparative analysis revealed that EC methods consistently yield more precise and optimal solutions than brute force in a significantly shorter time. This allowed us to improve the optimization by increasing the number of variables in the design, which was impossible with naive methods. The results show significant improvements in terms of the torque magnitude the device transfers to the user, enhancing its efficiency. These findings underline the importance of performing proper optimization while designing exoskeletons, as well as providing a significant improvement to this specific robotic design.
Hand Dominance and Congruence for Wrist-worn Haptics using Custom Voice-Coil Actuation
Aug 20, 2023



During virtual interactions, rendering haptic feedback on a remote location (like the wrist) instead of the fingertips freeing users' hands from mechanical devices. This allows for real interactions while still providing information regarding the mechanical properties of virtual objects. In this paper, we present CoWrHap -- a novel wrist-worn haptic device with custom-made voice coil actuation to render force feedback. Then, we investigate the impact of asking participants to use their dominant or non-dominant hand for virtual interactions and the best mapping between the active hand and the wrist receiving the haptic feedback, which can be defined as hand-wrist congruence through a user experiment based on a stiffness discrimination task. Our results show that participants performed the tasks (i) better with non-congruent mapping but reported better experiences with congruent mapping, and (ii) with no statistical difference in terms of hand dominance but reported better user experience and enjoyment using their dominant hands. This study indicates that participants can perceive mechanical properties via haptic feedback provided through CoWrHap.
Haptic Feedback Relocation from the Fingertips to the Wrist for Two-Finger Manipulation in Virtual Reality
Sep 15, 2022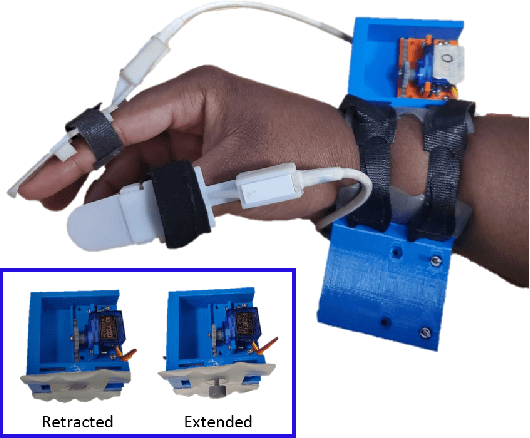

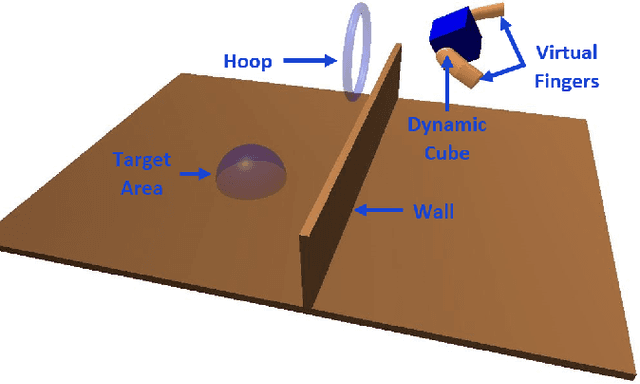
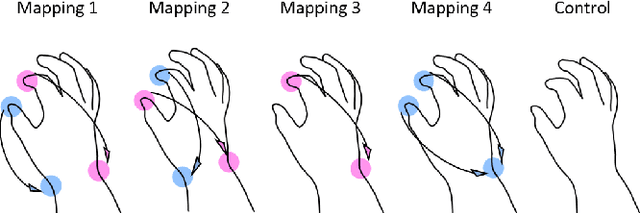
Relocation of haptic feedback from the fingertips to the wrist has been considered as a way to enable haptic interaction with mixed reality virtual environments while leaving the fingers free for other tasks. We present a pair of wrist-worn tactile haptic devices and a virtual environment to study how various mappings between fingers and tactors affect task performance. The haptic feedback rendered to the wrist reflects the interaction forces occurring between a virtual object and virtual avatars controlled by the index finger and thumb. We performed a user study comparing four different finger-to-tactor haptic feedback mappings and one no-feedback condition as a control. We evaluated users' ability to perform a simple pick-and-place task via the metrics of task completion time, path length of the fingers and virtual cube, and magnitudes of normal and shear forces at the fingertips. We found that multiple mappings were effective, and there was a greater impact when visual cues were limited. We discuss the limitations of our approach and describe next steps toward multi-degree-of-freedom haptic rendering for wrist-worn devices to improve task performance in virtual environments.
Effects of Haptic Feedback on the Wrist during Virtual Manipulation
Apr 12, 2022
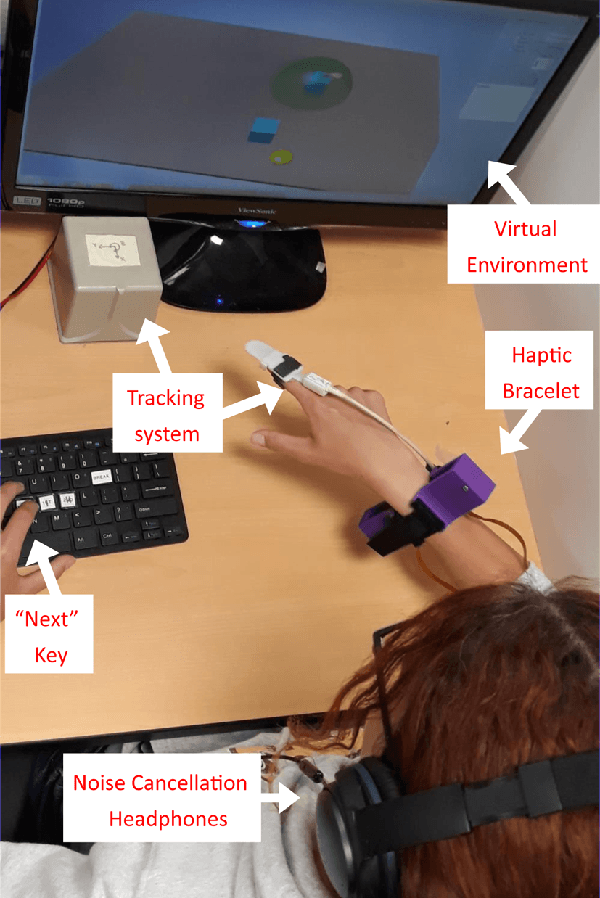
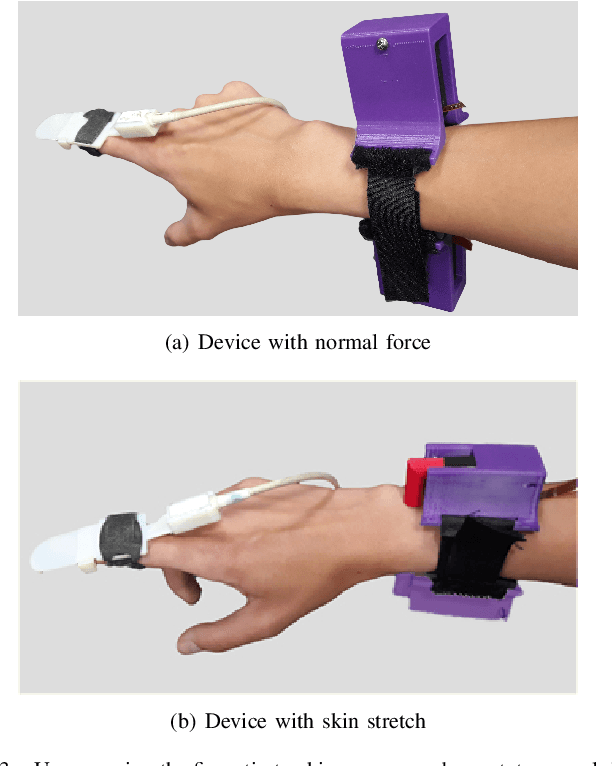
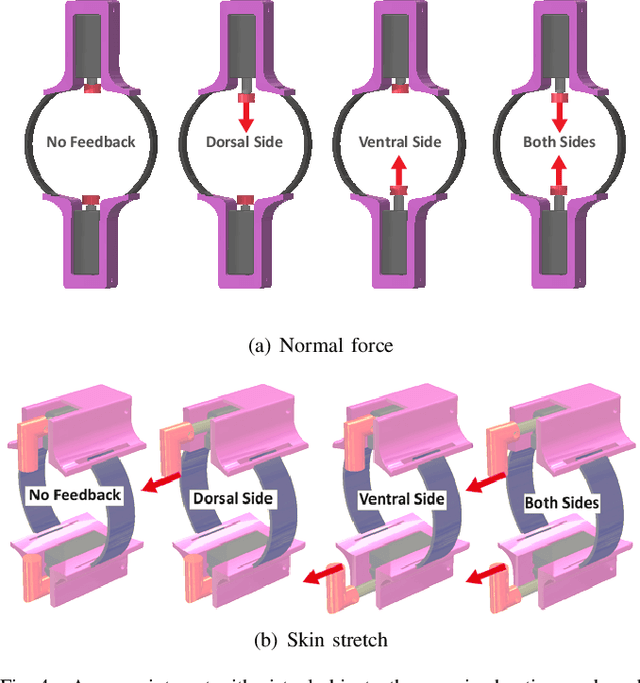
We propose a haptic system for virtual manipulation to provide feedback on the user's forearm instead of the fingertips. In addition to visual rendering of the manipulation with virtual fingertips, we employ a device to deliver normal or shear skin-stretch at multiple points near the wrist. To understand how design parameters influence the experience, we investigated the effect of the number and location of sensory feedback on stiffness perception. Participants compared stiffness values of virtual objects, while the haptic bracelet provided interaction feedback on the dorsal, ventral, or both sides of the wrist. Stiffness discrimination judgments and duration, as well as qualitative results collected verbally, indicate no significant difference in stiffness perception with stimulation at different and multiple locations.
Perception of Mechanical Properties via Wrist Haptics: Effects of Feedback Congruence
Apr 12, 2022



Despite non-co-location, haptic stimulation at the wrist can potentially provide feedback regarding interactions at the fingertips without encumbering the user's hand. Here we investigate how two types of skin deformation at the wrist (normal and shear) relate to the perception of the mechanical properties of virtual objects. We hypothesized that a congruent mapping between force at the fingertips and deformation at the wrist would be better, i.e. mapping finger normal force to skin indentation at the wrist, and shear force to skin shear at the wrist, would result in better perception than other mappings that either mixed or merged the two direction into a single type of feedback. We performed an experiment where haptic devices at the wrist rendered either normal or shear feedback during manipulation of virtual objects with varying stiffness, mass, or friction properties. Perception of mechanical properties was more accurate with congruent skin stimulation than noncongruent. In addition, discrimination performance and subjective reports were positively influenced by congruence. This study demonstrates that users can perceive mechanical properties via haptic feedback provided at the wrist with a consistent mapping between haptic feedback and interaction forces at the fingertips, regardless of congruence.
Design and Kinematic Optimization of a Novel Underactuated Robotic Hand Exoskeleton
May 07, 2020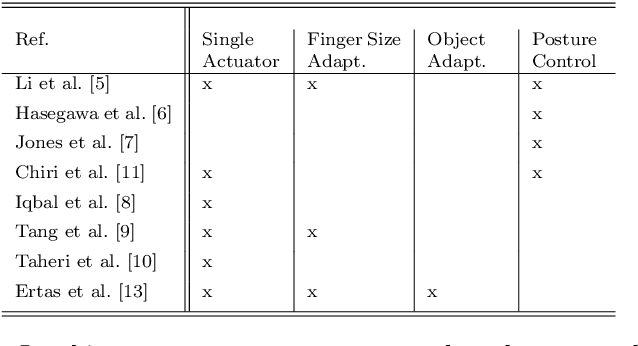
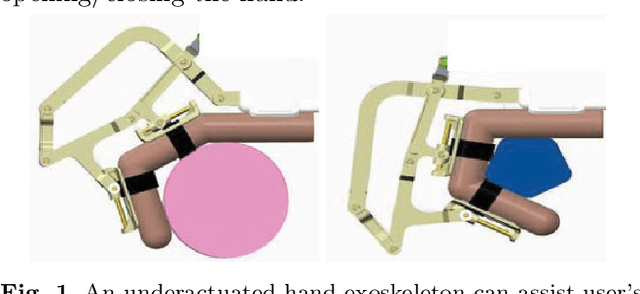
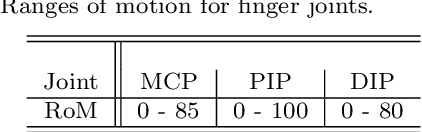
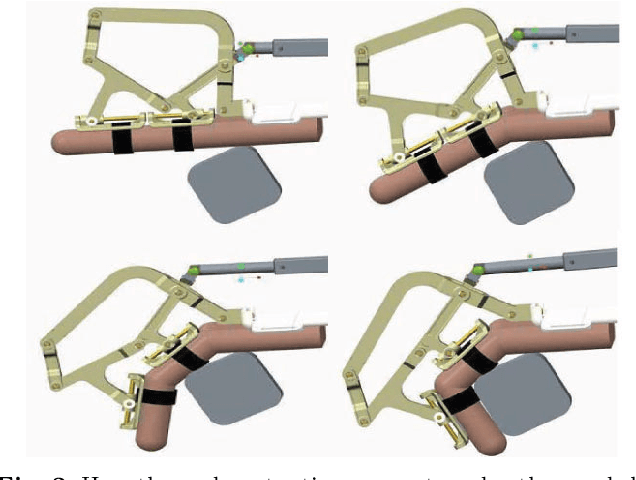
This study presents the design and the kinematic optimization of a novel, underactuated, linkage-based robotic hand exoskeleton to assist users in performing grasping tasks. The device has been designed to apply only normal forces to the finger phalanges during flexion/extension of the fingers, while providing automatic adaptability for different finger sizes. Thus, the easiness of the attachment to the user's fingers and better comfort have been ensured. The analyses of the device kinematic pose, statics, and stability of grasp have been performed. These analyses have been used to optimize the link lengths of the mechanism, ensuring that a reasonable range of motion is satisfied while maximizing the force transmission on the finger joints. Finally, the usability of a prototype with multiple fingers has been tested during grasping tasks with different objects.
* 12 pages
Haptic Sketches on the Arm for Manipulation in Virtual Reality
Nov 14, 2019

We propose a haptic system that applies forces or skin deformation to the user's arm, rather than at the fingertips, for believable interaction with virtual objects as an alternative to complex thimble devices. Such a haptic system would be able to convey information to the arm instead of the fingertips, even though the user manipulates virtual objects using their hands. We developed a set of haptic sketches to determine which directions of skin deformation are deemed more believable during a grasp and lift task. Subjective reports indicate that normal forces were the most believable feedback to represent this interaction.
* 2 pages, work in progress
Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use
Nov 14, 2019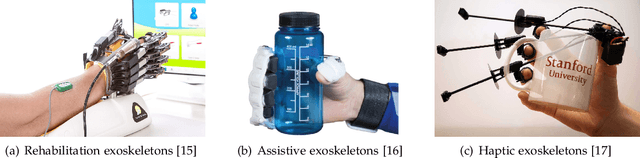
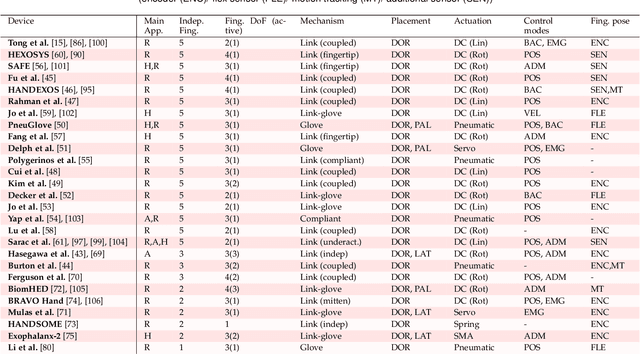
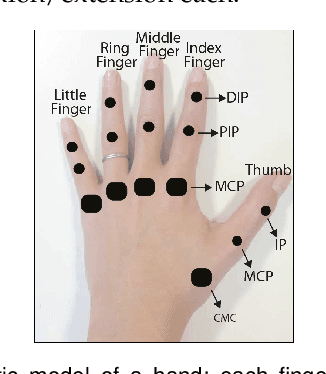
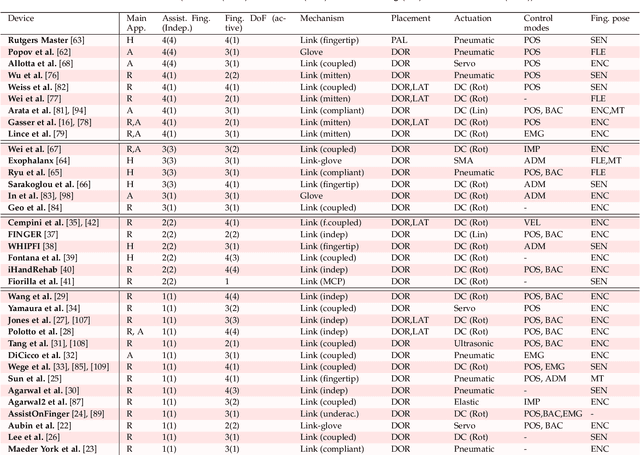
Most current hand exoskeletons have been designed specifically for rehabilitation, assistive or haptic applications to simplify the design requirements. Clinical studies on post-stroke rehabilitation have shown that adapting assistive or haptic applications into physical therapy sessions significantly improves the motor learning and treatment process. The recent technology can lead to the creation of generic hand exoskeletons that are application-agnostic. In this paper, our motivation is to create guidelines and best practices for generic exoskeletons by reviewing the literature of current devices. First, we describe each application and briefly explain their design requirements, and then list the design selections to achieve these requirements. Then, we detail each selection by investigating the existing exoskeletons based on their design choices, and by highlighting their impact on application types. With the motivation of creating efficient generic exoskeletons in the future, we finally summarize the best practices in the literature.
* 15 pages