 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnnotation of Soft Onsets in String Ensemble Recordings
Nov 16, 2022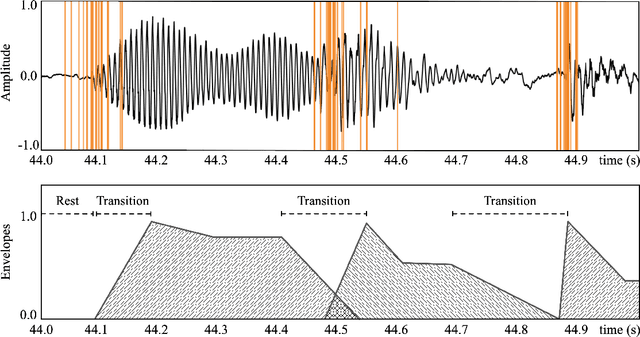
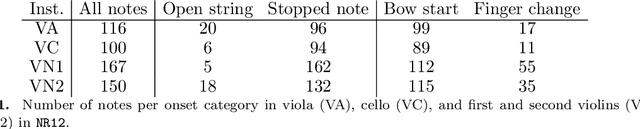
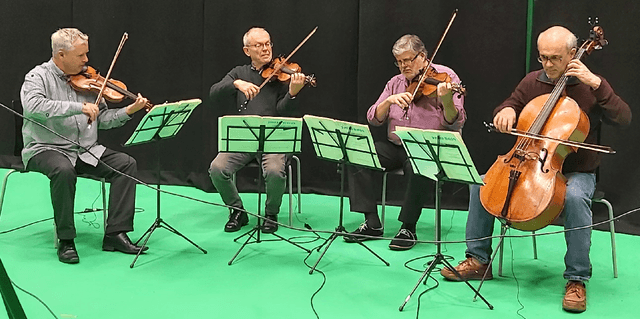

Onset detection is the process of identifying the start points of musical note events within an audio recording. While the detection of percussive onsets is often considered a solved problem, soft onsets-as found in string instrument recordings-still pose a significant challenge for state-of-the-art algorithms. The problem is further exacerbated by a paucity of data containing expert annotations and research related to best practices for curating soft onset annotations for string instruments. To this end, we investigate inter-annotator agreement between 24 participants, extend an algorithm for determining the most consistent annotator, and compare the performance of human annotators and state-of-the-art onset detection algorithms. Experimental results reveal a positive trend between musical experience and both inter-annotator agreement and performance in comparison with automated systems. Additionally, onsets produced by changes in fingering as well as those from the cello were found to be particularly challenging for both human annotators and automatic approaches. To promote research in best practices for annotation of soft onsets, we have made all experimental data associated with this study publicly available. In addition, we publish the ARME Virtuoso Strings dataset, consisting of over 144 recordings of professional performances of an excerpt from Haydn's string quartet Op. 74 No. 1 Finale, each with corresponding individual instrumental onset annotations.
Effects of Haptic Feedback on the Wrist during Virtual Manipulation
Apr 12, 2022
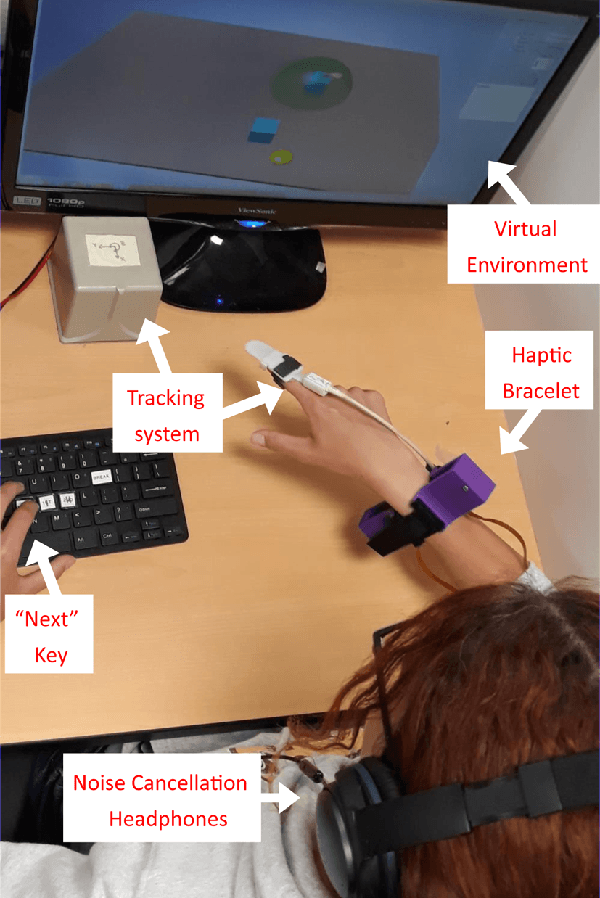
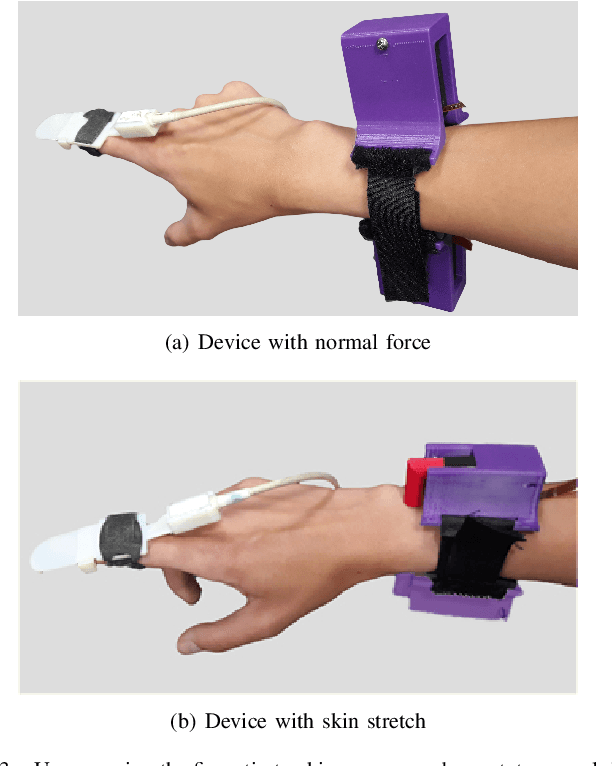
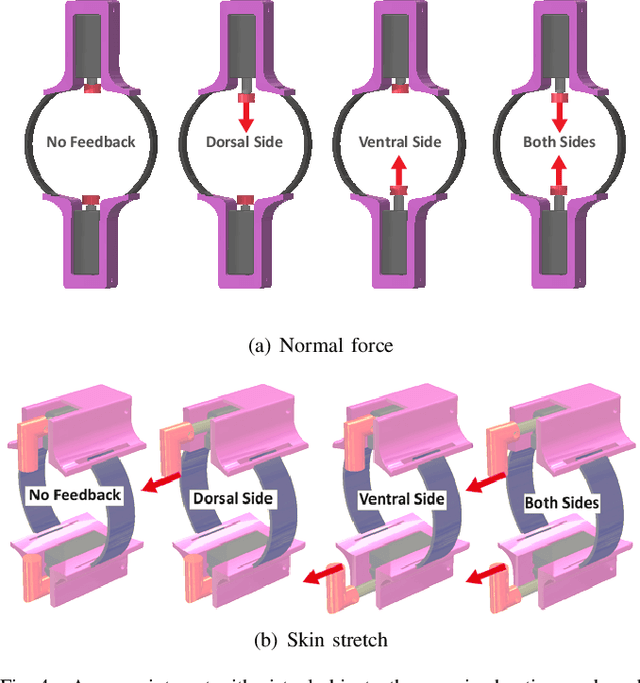
We propose a haptic system for virtual manipulation to provide feedback on the user's forearm instead of the fingertips. In addition to visual rendering of the manipulation with virtual fingertips, we employ a device to deliver normal or shear skin-stretch at multiple points near the wrist. To understand how design parameters influence the experience, we investigated the effect of the number and location of sensory feedback on stiffness perception. Participants compared stiffness values of virtual objects, while the haptic bracelet provided interaction feedback on the dorsal, ventral, or both sides of the wrist. Stiffness discrimination judgments and duration, as well as qualitative results collected verbally, indicate no significant difference in stiffness perception with stimulation at different and multiple locations.
Haptic Sketches on the Arm for Manipulation in Virtual Reality
Nov 14, 2019

We propose a haptic system that applies forces or skin deformation to the user's arm, rather than at the fingertips, for believable interaction with virtual objects as an alternative to complex thimble devices. Such a haptic system would be able to convey information to the arm instead of the fingertips, even though the user manipulates virtual objects using their hands. We developed a set of haptic sketches to determine which directions of skin deformation are deemed more believable during a grasp and lift task. Subjective reports indicate that normal forces were the most believable feedback to represent this interaction.
* 2 pages, work in progress