 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised Hypergraphs for Learning Multiple World Interpretations
Aug 21, 2023We present a method for learning multiple scene representations given a small labeled set, by exploiting the relationships between such representations in the form of a multi-task hypergraph. We also show how we can use the hypergraph to improve a powerful pretrained VisTransformer model without any additional labeled data. In our hypergraph, each node is an interpretation layer (e.g., depth or segmentation) of the scene. Within each hyperedge, one or several input nodes predict the layer at the output node. Thus, each node could be an input node in some hyperedges and an output node in others. In this way, multiple paths can reach the same node, to form ensembles from which we obtain robust pseudolabels, which allow self-supervised learning in the hypergraph. We test different ensemble models and different types of hyperedges and show superior performance to other multi-task graph models in the field. We also introduce Dronescapes, a large video dataset captured with UAVs in different complex real-world scenes, with multiple representations, suitable for multi-task learning.
Multi-Task Hypergraphs for Semi-supervised Learning using Earth Observations
Aug 21, 2023



There are many ways of interpreting the world and they are highly interdependent. We exploit such complex dependencies and introduce a powerful multi-task hypergraph, in which every node is a task and different paths through the hypergraph reaching a given task become unsupervised teachers, by forming ensembles that learn to generate reliable pseudolabels for that task. Each hyperedge is part of an ensemble teacher for a given task and it is also a student of the self-supervised hypergraph system. We apply our model to one of the most important problems of our times, that of Earth Observation, which is highly multi-task and it often suffers from missing ground-truth data. By performing extensive experiments on the NASA NEO Dataset, spanning a period of 22 years, we demonstrate the value of our multi-task semi-supervised approach, by consistent improvements over strong baselines and recent work. We also show that the hypergraph can adapt unsupervised to gradual data distribution shifts and reliably recover, through its multi-task self-supervision process, the missing data for several observational layers for up to seven years.
Semi-Supervised Learning for Multi-Task Scene Understanding by Neural Graph Consensus
Oct 02, 2020
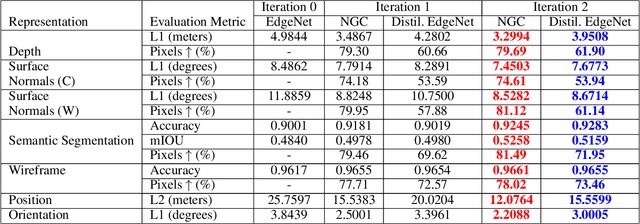


We address the challenging problem of semi-supervised learning in the context of multiple visual interpretations of the world by finding consensus in a graph of neural networks. Each graph node is a scene interpretation layer, while each edge is a deep net that transforms one layer at one node into another from a different node. During the supervised phase edge networks are trained independently. During the next unsupervised stage edge nets are trained on the pseudo-ground truth provided by consensus among multiple paths that reach the nets' start and end nodes. These paths act as ensemble teachers for any given edge and strong consensus is used for high-confidence supervisory signal. The unsupervised learning process is repeated over several generations, in which each edge becomes a "student" and also part of different ensemble "teachers" for training other students. By optimizing such consensus between different paths, the graph reaches consistency and robustness over multiple interpretations and generations, in the face of unknown labels. We give theoretical justifications of the proposed idea and validate it on a large dataset. We show how prediction of different representations such as depth, semantic segmentation, surface normals and pose from RGB input could be effectively learned through self-supervised consensus in our graph. We also compare to state-of-the-art methods for multi-task and semi-supervised learning and show superior performance.