 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Realistic Joint Space Boundaries for Range of Motion Analysis of Healthy and Impaired Human Arms
Nov 17, 2023A realistic human kinematic model that satisfies anatomical constraints is essential for human-robot interaction, biomechanics and robot-assisted rehabilitation. Modeling realistic joint constraints, however, is challenging as human arm motion is constrained by joint limits, inter- and intra-joint dependencies, self-collisions, individual capabilities and muscular or neurological constraints which are difficult to represent. Hence, physicians and researchers have relied on simple box-constraints, ignoring important anatomical factors. In this paper, we propose a data-driven method to learn realistic anatomically constrained upper-limb range of motion (RoM) boundaries from motion capture data. This is achieved by fitting a one-class support vector machine to a dataset of upper-limb joint space exploration motions with an efficient hyper-parameter tuning scheme. Our approach outperforms similar works focused on valid RoM learning. Further, we propose an impairment index (II) metric that offers a quantitative assessment of capability/impairment when comparing healthy and impaired arms. We validate the metric on healthy subjects physically constrained to emulate hemiplegia and different disability levels as stroke patients.
Feasibility and Acceptability of Remote Neuromotor Rehabilitation Interactions Using Social Robot Augmented Telepresence: A Case Study
Feb 27, 2022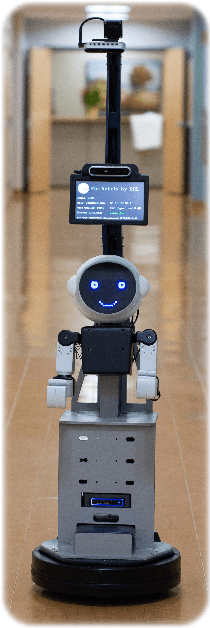
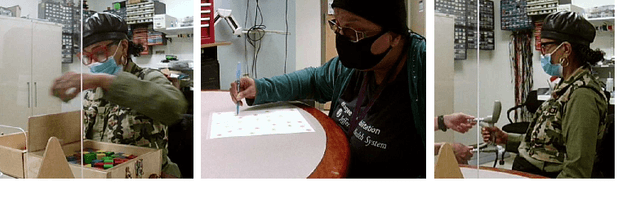


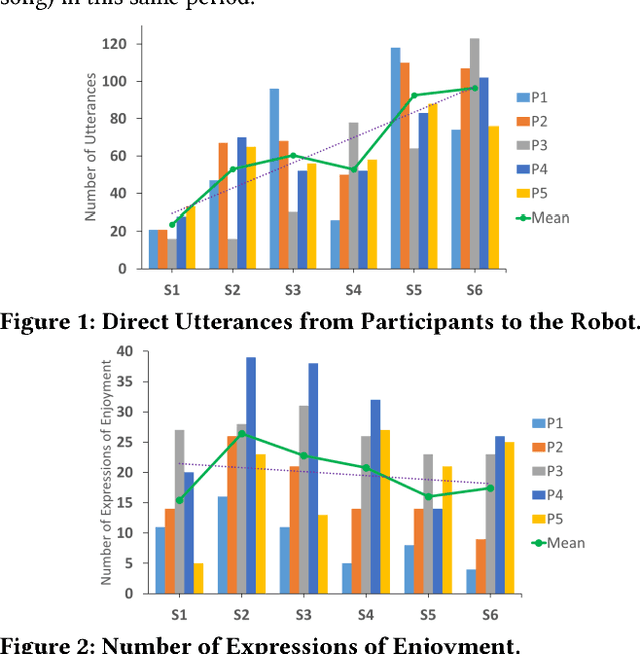
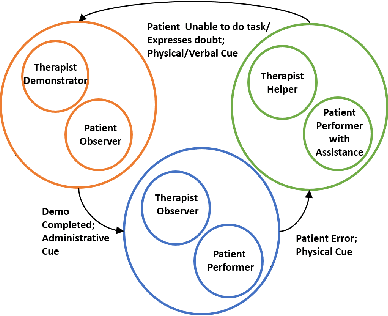
There is a growing need to deliver rehabilitation care to patients remotely. Long term demographic changes, geographic shortages of care providers, and now a global pandemic contribute to this need. Telepresence provides an option for delivering this care. However, telepresence using video and audio alone does not provide an interaction of the same quality as in-person. To bridge this gap, we propose the use of social robot augmented telepresence (SRAT). We have constructed a demonstration SRAT system for upper extremity rehab, in which a humanoid, with a head, body, face, and arms, is attached to a mobile telepresence system, to collaborate with the patient and clinicians as an independent social entity. The humanoid can play games with the patient and demonstrate activities.These activities could be used both to perform assessments in support of self-directed rehab and to perform exercises. In this paper, we present a case series with six subjects who completed interactions with the robot, three subjects who have previously suffered a stroke and three pediatric subjects who are typically developing. Subjects performed a Simon Says activity and a target touch activity in person, using classical telepresence (CT), and using SRAT. Subjects were able to effectively work with the social robot guiding interactions and 5 of 6 rated SRAT better than CT. This study demonstrates the feasibility of SRAT and some of its benefits.
Proceedings of the Workshop on Social Robots in Therapy: Focusing on Autonomy and Ethical Challenges
Dec 18, 2018
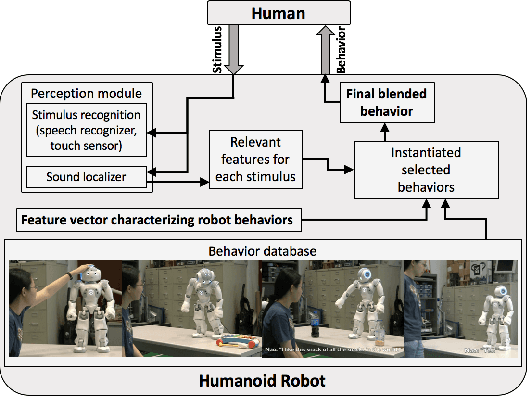
Robot-Assisted Therapy (RAT) has successfully been used in HRI research by including social robots in health-care interventions by virtue of their ability to engage human users both social and emotional dimensions. Research projects on this topic exist all over the globe in the USA, Europe, and Asia. All of these projects have the overall ambitious goal to increase the well-being of a vulnerable population. Typical work in RAT is performed using remote controlled robots; a technique called Wizard-of-Oz (WoZ). The robot is usually controlled, unbeknownst to the patient, by a human operator. However, WoZ has been demonstrated to not be a sustainable technique in the long-term. Providing the robots with autonomy (while remaining under the supervision of the therapist) has the potential to lighten the therapists burden, not only in the therapeutic session itself but also in longer-term diagnostic tasks. Therefore, there is a need for exploring several degrees of autonomy in social robots used in therapy. Increasing the autonomy of robots might also bring about a new set of challenges. In particular, there will be a need to answer new ethical questions regarding the use of robots with a vulnerable population, as well as a need to ensure ethically-compliant robot behaviours. Therefore, in this workshop we want to gather findings and explore which degree of autonomy might help to improve health-care interventions and how we can overcome the ethical challenges inherent to it.