 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mosquito Pick-and-Place System for PfSPZ-based Malaria Vaccine Production
Apr 12, 2020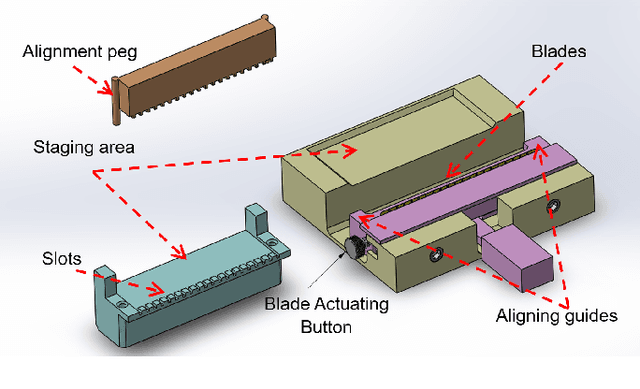
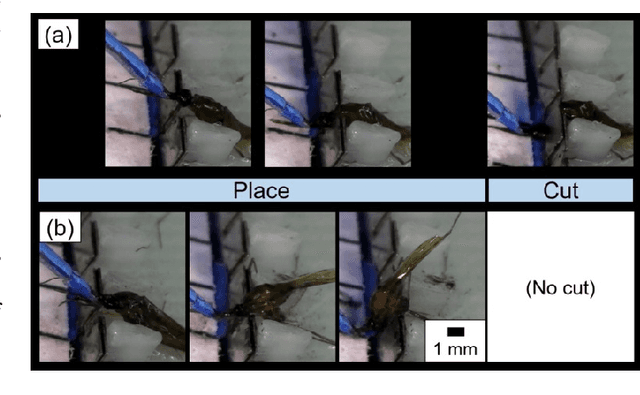
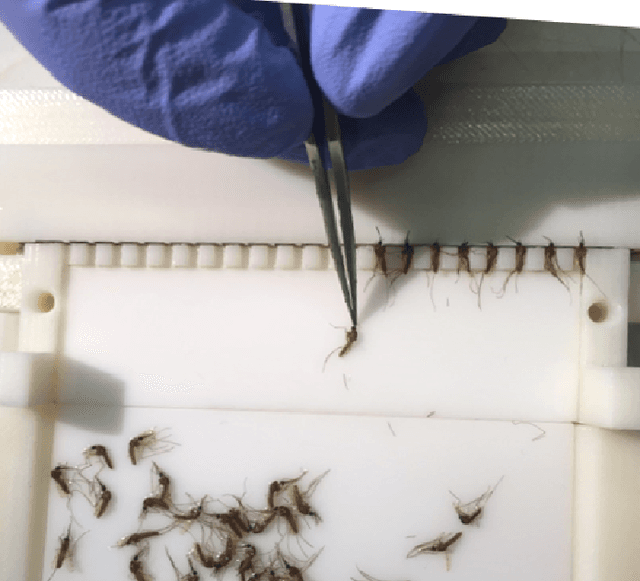
The treatment of malaria is a global health challenge that stands to benefit from the widespread introduction of a vaccine for the disease. A method has been developed to create a live organism vaccine using the sporozoites (SPZ) of the parasite Plasmodium falciparum (Pf), which are concentrated in the salivary glands of infected mosquitoes. Current manual dissection methods to obtain these PfSPZ are not optimally efficient for large-scale vaccine production. We propose an improved dissection procedure and a mechanical fixture that increases the rate of mosquito dissection and helps to deskill this stage of the production process. We further demonstrate the automation of a key step in this production process, the picking and placing of mosquitoes from a staging apparatus into a dissection assembly. This unit test of a robotic mosquito pick-and-place system is performed using a custom-designed micro-gripper attached to a four degree of freedom (4-DOF) robot under the guidance of a computer vision system. Mosquitoes are autonomously grasped and pulled to a pair of notched dissection blades to remove the head of the mosquito, allowing access to the salivary glands. Placement into these blades is adapted based on output from computer vision to accommodate for the unique anatomy and orientation of each grasped mosquito. In this pilot test of the system on 50 mosquitoes, we demonstrate a 100% grasping accuracy and a 90% accuracy in placing the mosquito with its neck within the blade notches such that the head can be removed. This is a promising result for this difficult and non-standard pick-and-place task.
FBG-Based Control of a Continuum Manipulator Interacting With Obstacles
Jul 01, 2018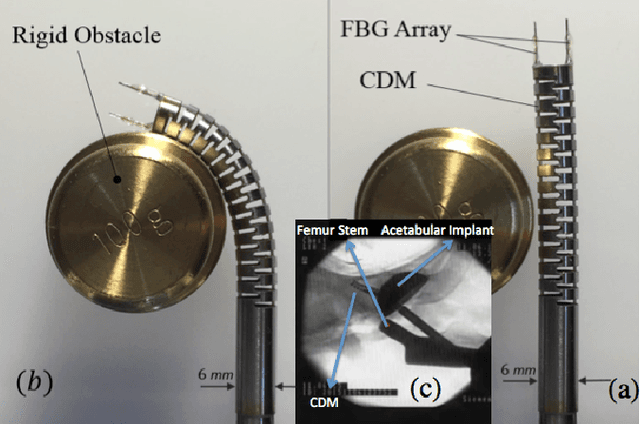
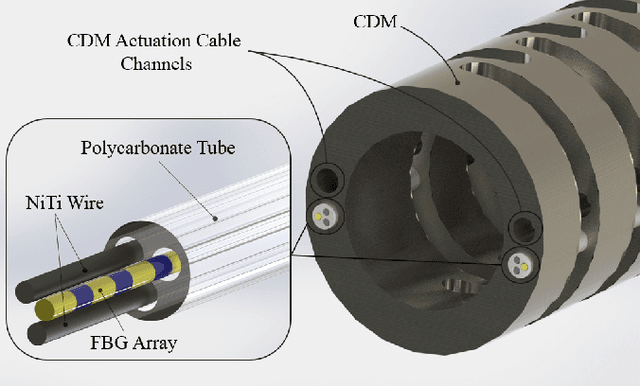
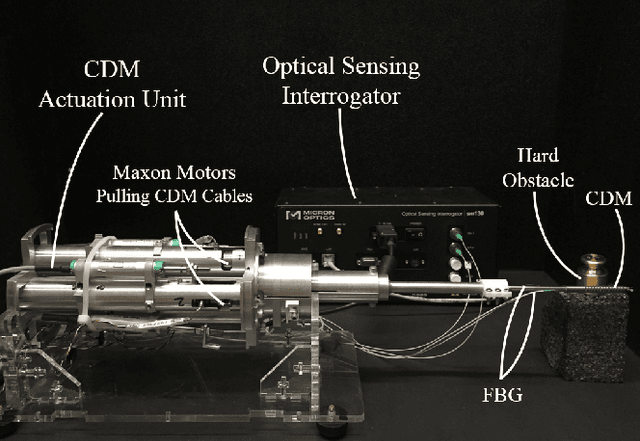
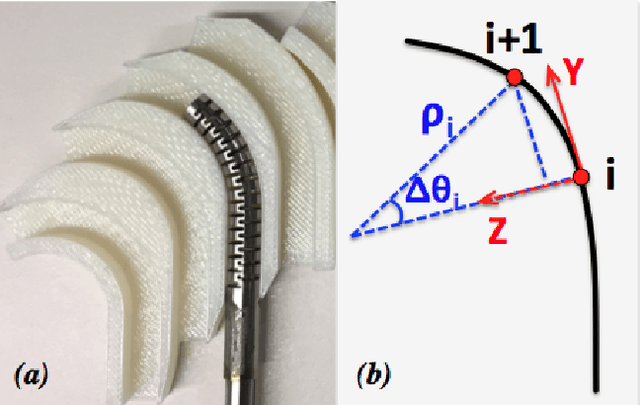
Tracking and controlling the shape of continuum dexterous manipulators (CDM) in constraint environments is a challenging task. The imposed constraints and interaction with unknown obstacles may conform the CDM's shape and therefore demands for shape sensing methods which do not rely on direct line of sight. To address these issues, we integrate a novel Fiber Bragg Grating (FBG) shape sensing unit into a CDM, reconstruct the shape in real-time, and develop an optimization-based control algorithm using FBG tip position feedback. The CDM is designed for less-invasive treatment of osteolysis (bone degradation). To evaluate the performance of the feedback control algorithm when the CDM interacts with obstacles, we perform a set of experiments similar to the real scenario of the CDM interaction with soft and hard lesions during the treatment of osteolysis. In addition, we propose methods for identification of the CDM collisions with soft or hard obstacles using the jacobian information. Results demonstrate successful control of the CDM tip based on the FBG feedback and indicate repeatability and robustness of the proposed method when interacting with unknown obstacles.