 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mosquito Pick-and-Place System for PfSPZ-based Malaria Vaccine Production
Apr 12, 2020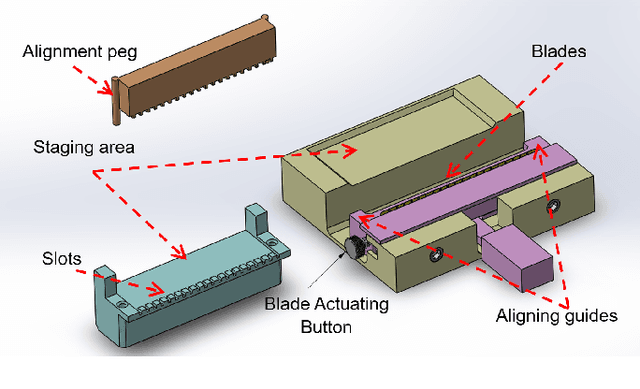
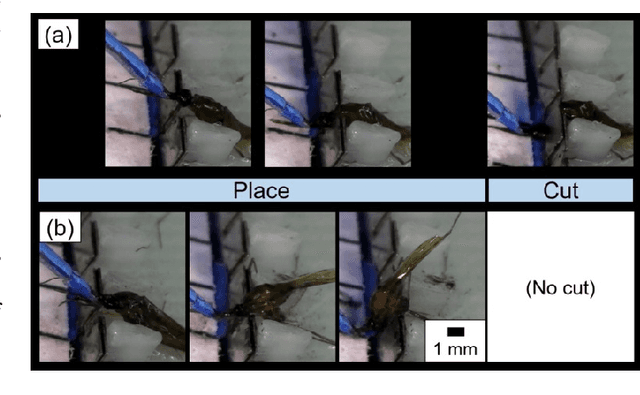
The treatment of malaria is a global health challenge that stands to benefit from the widespread introduction of a vaccine for the disease. A method has been developed to create a live organism vaccine using the sporozoites (SPZ) of the parasite Plasmodium falciparum (Pf), which are concentrated in the salivary glands of infected mosquitoes. Current manual dissection methods to obtain these PfSPZ are not optimally efficient for large-scale vaccine production. We propose an improved dissection procedure and a mechanical fixture that increases the rate of mosquito dissection and helps to deskill this stage of the production process. We further demonstrate the automation of a key step in this production process, the picking and placing of mosquitoes from a staging apparatus into a dissection assembly. This unit test of a robotic mosquito pick-and-place system is performed using a custom-designed micro-gripper attached to a four degree of freedom (4-DOF) robot under the guidance of a computer vision system. Mosquitoes are autonomously grasped and pulled to a pair of notched dissection blades to remove the head of the mosquito, allowing access to the salivary glands. Placement into these blades is adapted based on output from computer vision to accommodate for the unique anatomy and orientation of each grasped mosquito. In this pilot test of the system on 50 mosquitoes, we demonstrate a 100% grasping accuracy and a 90% accuracy in placing the mosquito with its neck within the blade notches such that the head can be removed. This is a promising result for this difficult and non-standard pick-and-place task.
An Efficient Production Process for Extracting Salivary Glands from Mosquitoes
Mar 05, 2019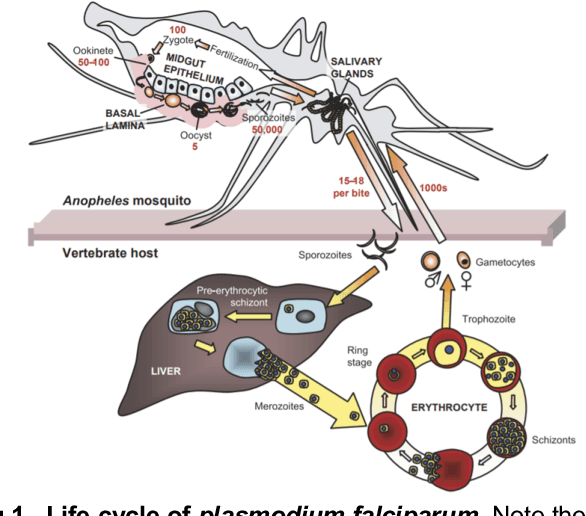

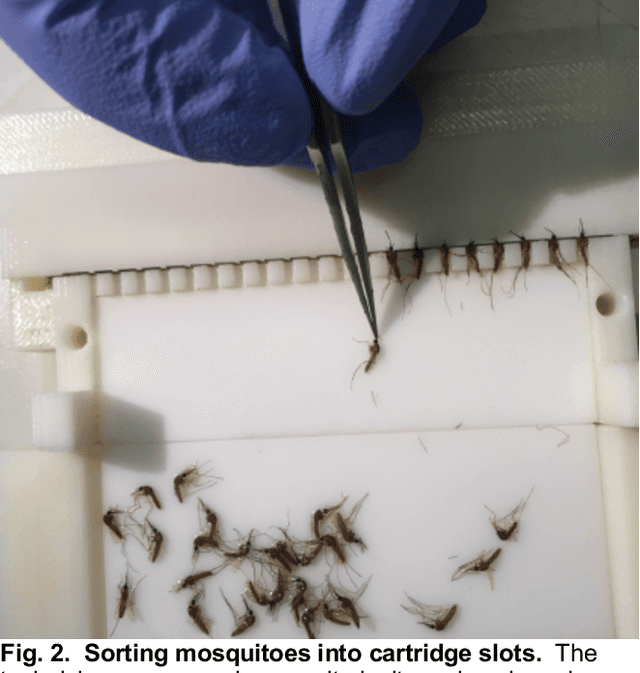
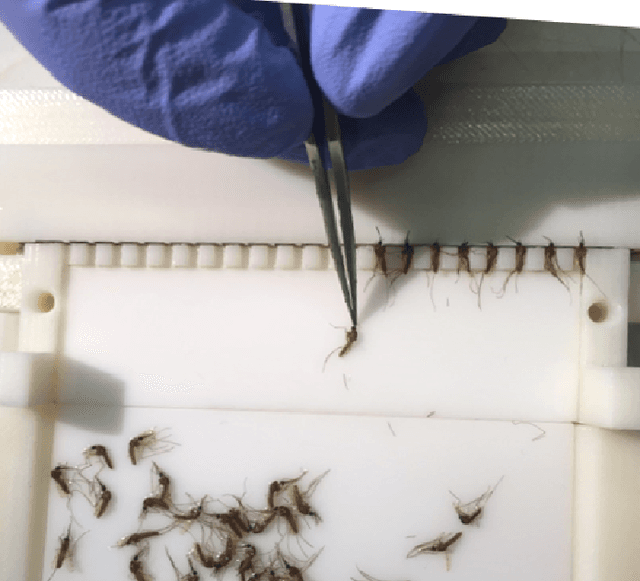
Malaria is the one of the leading causes of morbidity and mortality in many developing countries. The development of a highly effective and readily deployable vaccine represents a major goal for world health. There has been recent progress in developing a clinically effective vaccine manufactured using Plasmodium falciparum sporozoites (PfSPZ) extracted from the salivary glands of Anopheles sp. Mosquitoes. The harvesting of PfSPZ requires dissection of the mosquito and manual removal of the salivary glands from each mosquito by trained technicians. While PfSPZ-based vaccines have shown highly promising results, the process of dissection of salivary glands is tedious and labor intensive. We propose a mechanical device that will greatly increase the rate of mosquito dissection and deskill the process to make malaria vaccines more affordable and more readily available. This device consists of several components: a sorting stage in which the mosquitoes are sorted into slots, a cutting stage in which the heads are removed, and a squeezing stage in which the salivary glands are extracted and collected. This method allows mosquitoes to be dissected twenty at a time instead of one by one as previously done and significantly reduces the dissection time per mosquito.