 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Scale Wavelet Transformers for Operator Learning of Dynamical Systems
Feb 01, 2026Recent years have seen a surge in data-driven surrogates for dynamical systems that can be orders of magnitude faster than numerical solvers. However, many machine learning-based models such as neural operators exhibit spectral bias, attenuating high-frequency components that often encode small-scale structure. This limitation is particularly damaging in applications such as weather forecasting, where misrepresented high frequencies can induce long-horizon instability. To address this issue, we propose multi-scale wavelet transformers (MSWTs), which learn system dynamics in a tokenized wavelet domain. The wavelet transform explicitly separates low- and high-frequency content across scales. MSWTs leverage a wavelet-preserving downsampling scheme that retains high-frequency features and employ wavelet-based attention to capture dependencies across scales and frequency bands. Experiments on chaotic dynamical systems show substantial error reductions and improved long horizon spectral fidelity. On the ERA5 climate reanalysis, MSWTs further reduce climatological bias, demonstrating their effectiveness in a real-world forecasting setting.
Physics-Based Causal Reasoning for Safe & Robust Next-Best Action Selection in Robot Manipulation Tasks
Mar 21, 2024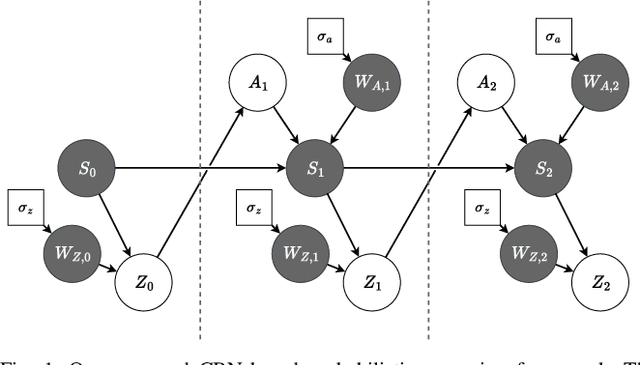
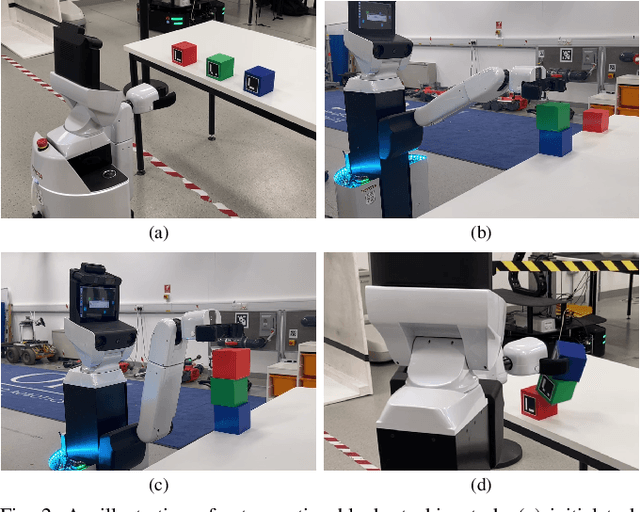
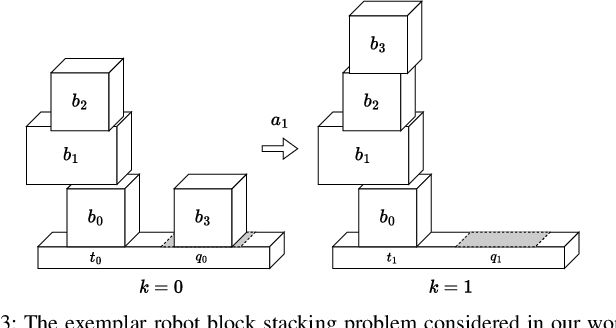
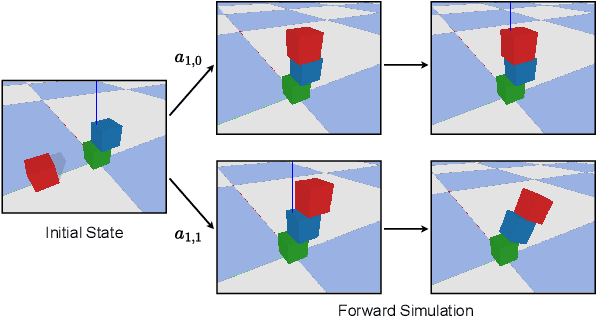
Safe and efficient object manipulation is a key enabler of many real-world robot applications. However, this is challenging because robot operation must be robust to a range of sensor and actuator uncertainties. In this paper, we present a physics-informed causal-inference-based framework for a robot to probabilistically reason about candidate actions in a block stacking task in a partially observable setting. We integrate a physics-based simulation of the rigid-body system dynamics with a causal Bayesian network (CBN) formulation to define a causal generative probabilistic model of the robot decision-making process. Using simulation-based Monte Carlo experiments, we demonstrate our framework's ability to successfully: (1) predict block tower stability with high accuracy (Pred Acc: 88.6%); and, (2) select an approximate next-best action for the block stacking task, for execution by an integrated robot system, achieving 94.2% task success rate. We also demonstrate our framework's suitability for real-world robot systems by demonstrating successful task executions with a domestic support robot, with perception and manipulation sub-system integration. Hence, we show that by embedding physics-based causal reasoning into robots' decision-making processes, we can make robot task execution safer, more reliable, and more robust to various types of uncertainty.