 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Study on Automatically Assembling Custom Catering Packages With a 3-DOF Delta Robot Using Deep Learning Methods
May 17, 2025This paper introduces a pioneering experimental study on the automated packing of a catering package using a two-fingered gripper affixed to a 3-degree-of-freedom Delta parallel robot. A distinctive contribution lies in the application of a deep learning approach to tackle this challenge. A custom dataset, comprising 1,500 images, is meticulously curated for this endeavor, representing a noteworthy initiative as the first dataset focusing on Persian-manufactured products. The study employs the YOLOV5 model for object detection, followed by segmentation using the FastSAM model. Subsequently, rotation angle calculation is facilitated with segmentation masks, and a rotated rectangle encapsulating the object is generated. This rectangle forms the basis for calculating two grasp points using a novel geometrical approach involving eigenvectors. An extensive experimental study validates the proposed model, where all pertinent information is seamlessly transmitted to the 3-DOF Delta parallel robot. The proposed algorithm ensures real-time detection, calibration, and the fully autonomous packing process of a catering package, boasting an impressive over 80\% success rate in automatic grasping. This study marks a significant stride in advancing the capabilities of robotic systems for practical applications in packaging automation.
Grasp the Graph (GtG) 2.0: Ensemble of GNNs for High-Precision Grasp Pose Detection in Clutter
May 05, 2025Grasp pose detection in cluttered, real-world environments remains a significant challenge due to noisy and incomplete sensory data combined with complex object geometries. This paper introduces Grasp the Graph 2.0 (GtG 2.0) method, a lightweight yet highly effective hypothesis-and-test robotics grasping framework which leverages an ensemble of Graph Neural Networks for efficient geometric reasoning from point cloud data. Building on the success of GtG 1.0, which demonstrated the potential of Graph Neural Networks for grasp detection but was limited by assumptions of complete, noise-free point clouds and 4-Dof grasping, GtG 2.0 employs a conventional Grasp Pose Generator to efficiently produce 7-Dof grasp candidates. Candidates are assessed with an ensemble Graph Neural Network model which includes points within the gripper jaws (inside points) and surrounding contextual points (outside points). This improved representation boosts grasp detection performance over previous methods using the same generator. GtG 2.0 shows up to a 35% improvement in Average Precision on the GraspNet-1Billion benchmark compared to hypothesis-and-test and Graph Neural Network-based methods, ranking it among the top three frameworks. Experiments with a 3-Dof Delta Parallel robot and Kinect-v1 camera show a success rate of 91% and a clutter completion rate of 100%, demonstrating its flexibility and reliability.
Real-Time Imitation of Human Head Motions, Blinks and Emotions by Nao Robot: A Closed-Loop Approach
Apr 28, 2025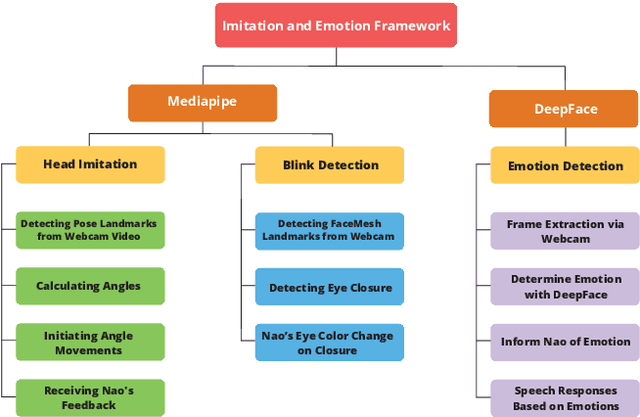

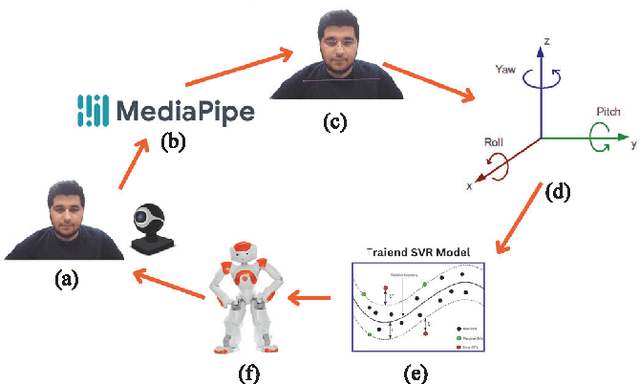
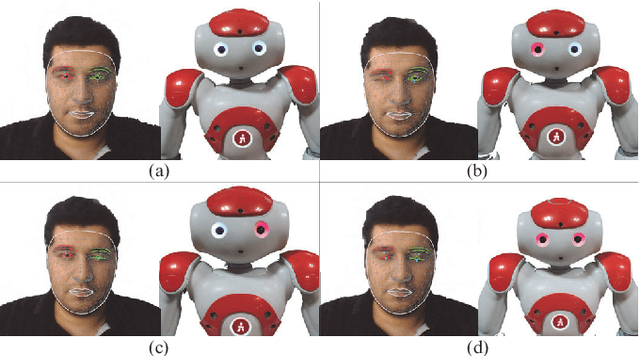
This paper introduces a novel approach for enabling real-time imitation of human head motion by a Nao robot, with a primary focus on elevating human-robot interactions. By using the robust capabilities of the MediaPipe as a computer vision library and the DeepFace as an emotion recognition library, this research endeavors to capture the subtleties of human head motion, including blink actions and emotional expressions, and seamlessly incorporate these indicators into the robot's responses. The result is a comprehensive framework which facilitates precise head imitation within human-robot interactions, utilizing a closed-loop approach that involves gathering real-time feedback from the robot's imitation performance. This feedback loop ensures a high degree of accuracy in modeling head motion, as evidenced by an impressive R2 score of 96.3 for pitch and 98.9 for yaw. Notably, the proposed approach holds promise in improving communication for children with autism, offering them a valuable tool for more effective interaction. In essence, proposed work explores the integration of real-time head imitation and real-time emotion recognition to enhance human-robot interactions, with potential benefits for individuals with unique communication needs.
AI-Driven Relocation Tracking in Dynamic Kitchen Environments
Mar 03, 2025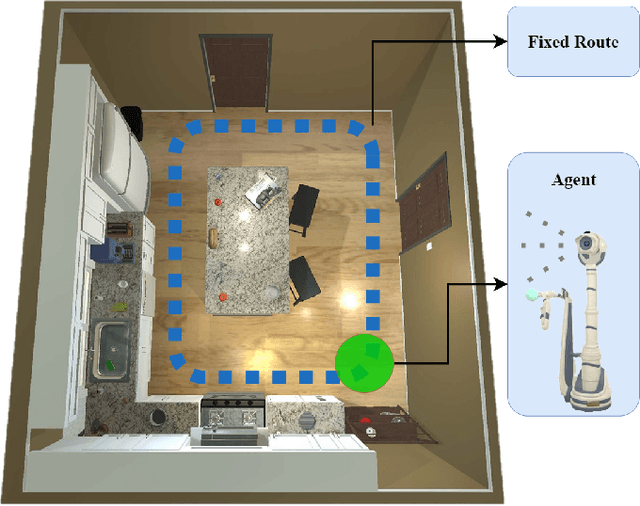

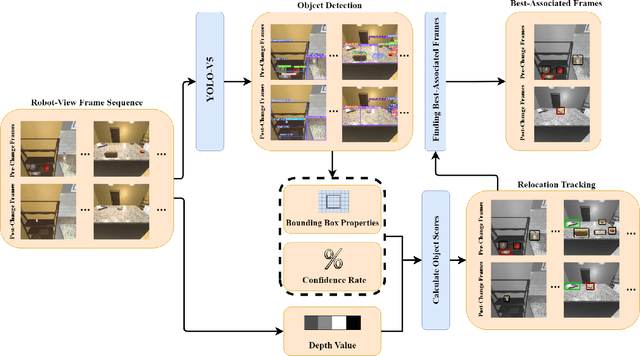
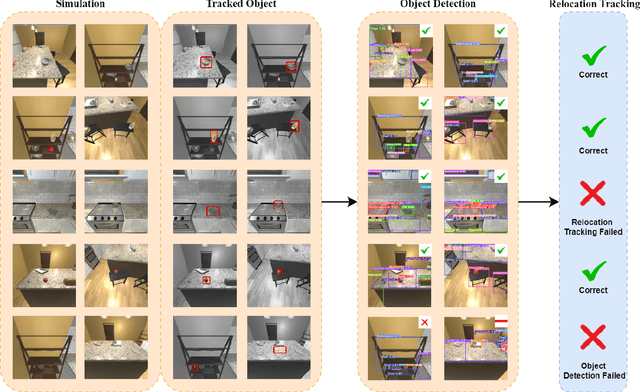
As smart homes become more prevalent in daily life, the ability to understand dynamic environments is essential which is increasingly dependent on AI systems. This study focuses on developing an intelligent algorithm which can navigate a robot through a kitchen, recognizing objects, and tracking their relocation. The kitchen was chosen as the testing ground due to its dynamic nature as objects are frequently moved, rearranged and replaced. Various techniques, such as SLAM feature-based tracking and deep learning-based object detection (e.g., Faster R-CNN), are commonly used for object tracking. Additionally, methods such as optical flow analysis and 3D reconstruction have also been used to track the relocation of objects. These approaches often face challenges when it comes to problems such as lighting variations and partial occlusions, where parts of the object are hidden in some frames but visible in others. The proposed method in this study leverages the YOLOv5 architecture, initialized with pre-trained weights and subsequently fine-tuned on a custom dataset. A novel method was developed, introducing a frame-scoring algorithm which calculates a score for each object based on its location and features within all frames. This scoring approach helps to identify changes by determining the best-associated frame for each object and comparing the results in each scene, overcoming limitations seen in other methods while maintaining simplicity in design. The experimental results demonstrate an accuracy of 97.72%, a precision of 95.83% and a recall of 96.84% for this algorithm, which highlights the efficacy of the model in detecting spatial changes.
Scene Understanding in Pick-and-Place Tasks: Analyzing Transformations Between Initial and Final Scenes
Sep 26, 2024



With robots increasingly collaborating with humans in everyday tasks, it is important to take steps toward robotic systems capable of understanding the environment. This work focuses on scene understanding to detect pick and place tasks given initial and final images from the scene. To this end, a dataset is collected for object detection and pick and place task detection. A YOLOv5 network is subsequently trained to detect the objects in the initial and final scenes. Given the detected objects and their bounding boxes, two methods are proposed to detect the pick and place tasks which transform the initial scene into the final scene. A geometric method is proposed which tracks objects' movements in the two scenes and works based on the intersection of the bounding boxes which moved within scenes. Contrarily, the CNN-based method utilizes a Convolutional Neural Network to classify objects with intersected bounding boxes into 5 classes, showing the spatial relationship between the involved objects. The performed pick and place tasks are then derived from analyzing the experiments with both scenes. Results show that the CNN-based method, using a VGG16 backbone, outscores the geometric method by roughly 12 percentage points in certain scenarios, with an overall success rate of 84.3%.
Improving the Successful Robotic Grasp Detection Using Convolutional Neural Networks
Mar 08, 2024Robotic grasp should be carried out in a real-time manner by proper accuracy. Perception is the first and significant step in this procedure. This paper proposes an improved pipeline model trying to detect grasp as a rectangle representation for different seen or unseen objects. It helps the robot to start control procedures from nearer to the proper part of the object. The main idea consists in pre-processing, output normalization, and data augmentation to improve accuracy by 4.3 percent without making the system slow. Also, a comparison has been conducted over different pre-trained models like AlexNet, ResNet, Vgg19, which are the most famous feature extractors for image processing in object detection. Although AlexNet has less complexity than other ones, it outperformed them, which helps the real-time property.
AGILE: Approach-based Grasp Inference Learned from Element Decomposition
Feb 06, 2024



Humans, this species expert in grasp detection, can grasp objects by taking into account hand-object positioning information. This work proposes a method to enable a robot manipulator to learn the same, grasping objects in the most optimal way according to how the gripper has approached the object. Built on deep learning, the proposed method consists of two main stages. In order to generalize the network on unseen objects, the proposed Approach-based Grasping Inference involves an element decomposition stage to split an object into its main parts, each with one or more annotated grasps for a particular approach of the gripper. Subsequently, a grasp detection network utilizes the decomposed elements by Mask R-CNN and the information on the approach of the gripper in order to detect the element the gripper has approached and the most optimal grasp. In order to train the networks, the study introduces a robotic grasping dataset collected in the Coppeliasim simulation environment. The dataset involves 10 different objects with annotated element decomposition masks and grasp rectangles. The proposed method acquires a 90% grasp success rate on seen objects and 78% on unseen objects in the Coppeliasim simulation environment. Lastly, simulation-to-reality domain adaptation is performed by applying transformations on the training set collected in simulation and augmenting the dataset, which results in a 70% physical grasp success performance using a Delta parallel robot and a 2 -fingered gripper.
Real-Time Facial Expression Recognition using Facial Landmarks and Neural Networks
Jan 31, 2022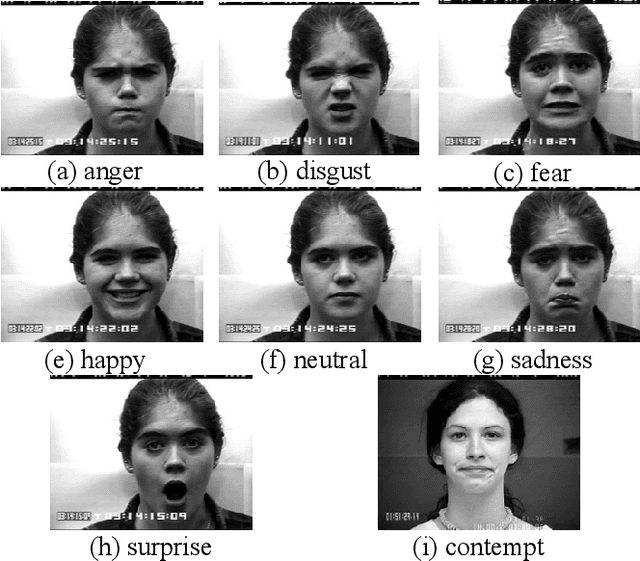
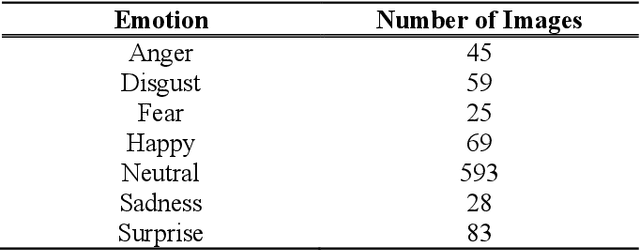
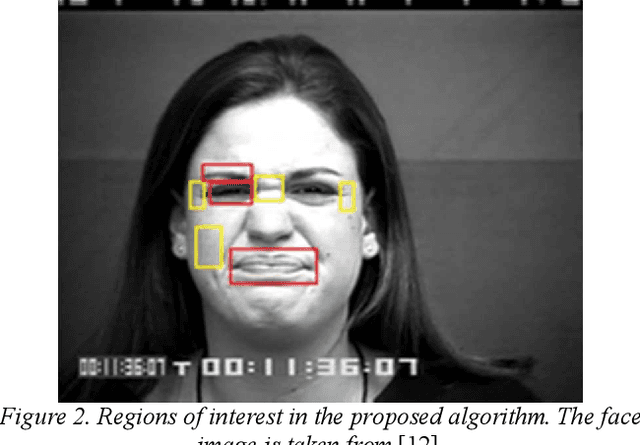
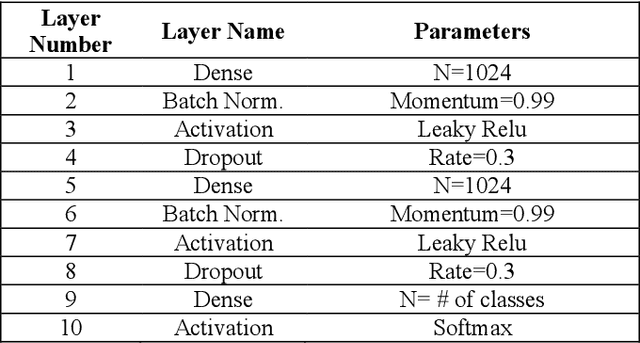
This paper presents a lightweight algorithm for feature extraction, classification of seven different emotions, and facial expression recognition in a real-time manner based on static images of the human face. In this regard, a Multi-Layer Perceptron (MLP) neural network is trained based on the foregoing algorithm. In order to classify human faces, first, some pre-processing is applied to the input image, which can localize and cut out faces from it. In the next step, a facial landmark detection library is used, which can detect the landmarks of each face. Then, the human face is split into upper and lower faces, which enables the extraction of the desired features from each part. In the proposed model, both geometric and texture-based feature types are taken into account. After the feature extraction phase, a normalized vector of features is created. A 3-layer MLP is trained using these feature vectors, leading to 96% accuracy on the test set.
A Deep Learning Based Automated Hand Hygiene Training System
Dec 10, 2021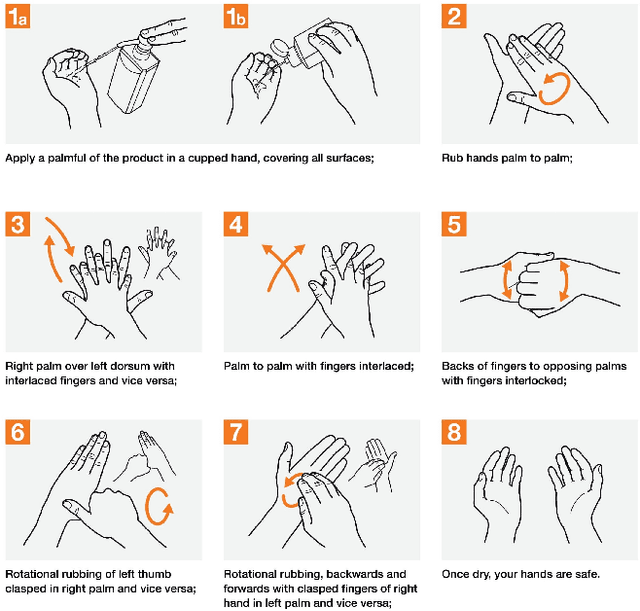
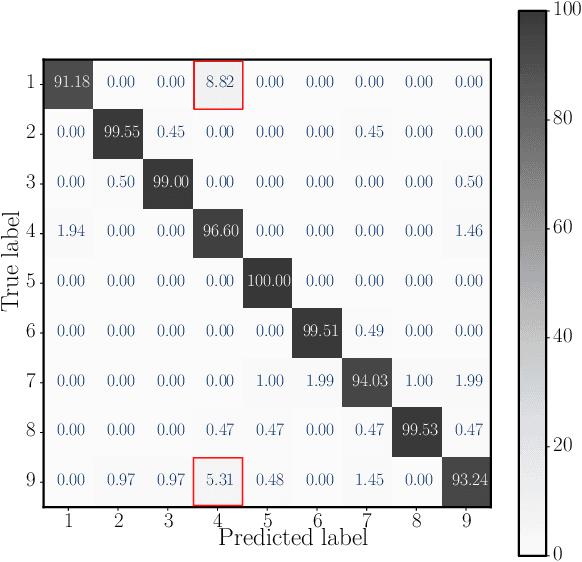
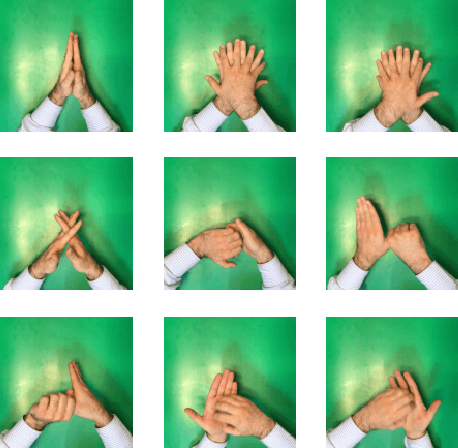
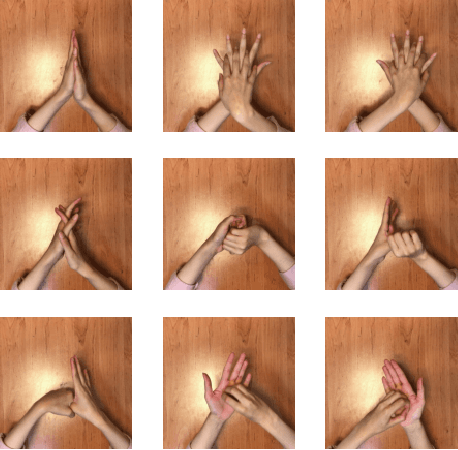
Hand hygiene is crucial for preventing viruses and infections. Due to the pervasive outbreak of COVID-19, wearing a mask and hand hygiene appear to be the most effective ways for the public to curb the spread of these viruses. The World Health Organization (WHO) recommends a guideline for alcohol-based hand rub in eight steps to ensure that all surfaces of hands are entirely clean. As these steps involve complex gestures, human assessment of them lacks enough accuracy. However, Deep Neural Network (DNN) and machine vision have made it possible to accurately evaluate hand rubbing quality for the purposes of training and feedback. In this paper, an automated deep learning based hand rub assessment system with real-time feedback is presented. The system evaluates the compliance with the 8-step guideline using a DNN architecture trained on a dataset of videos collected from volunteers with various skin tones and hand characteristics following the hand rubbing guideline. Various DNN architectures were tested, and an Inception-ResNet model led to the best results with 97% test accuracy. In the proposed system, an NVIDIA Jetson AGX Xavier embedded board runs the software. The efficacy of the system is evaluated in a concrete situation of being used by various users, and challenging steps are identified. In this experiment, the average time taken by the hand rubbing steps among volunteers is 27.2 seconds, which conforms to the WHO guidelines.
Experimental Study on the Imitation of the Human Head-and-Eye Pose Using the 3-DOF Agile Eye Parallel Robot with ROS and Mediapipe Framework
Nov 04, 2021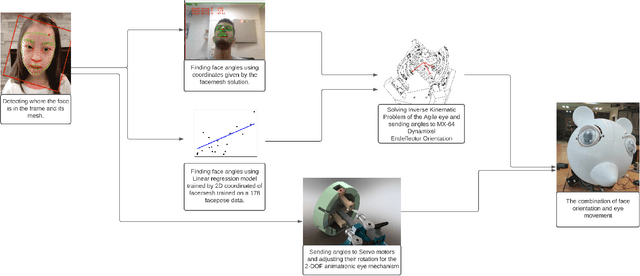
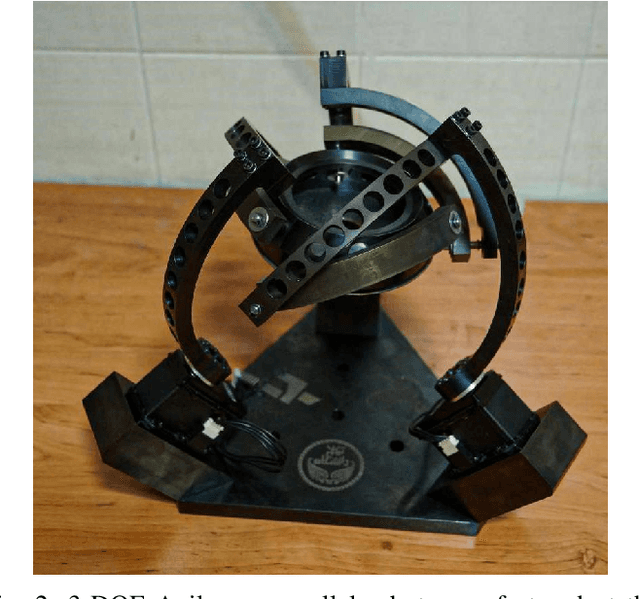
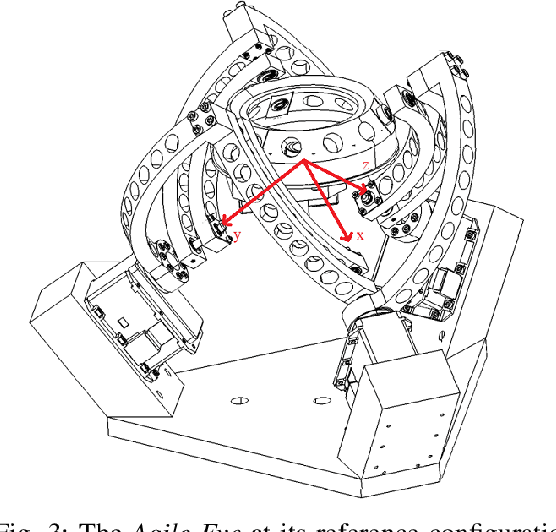
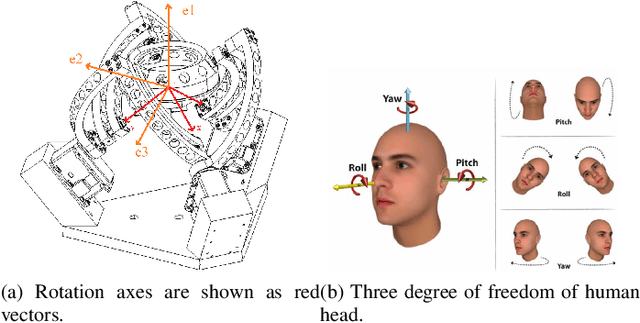
In this paper, a method to mimic a human face and eyes is proposed which can be regarded as a combination of computer vision techniques and neural network concepts. From a mechanical standpoint, a 3-DOF spherical parallel robot is used which imitates the human head movement. In what concerns eye movement, a 2-DOF mechanism is attached to the end-effector of the 3-DOF spherical parallel mechanism. In order to have robust and reliable results for the imitation, meaningful information should be extracted from the face mesh for obtaining the pose of a face, i.e., the roll, yaw, and pitch angles. To this end, two methods are proposed where each of them has its own pros and cons. The first method consists in resorting to the so-called Mediapipe library which is a machine learning solution for high-fidelity body pose tracking, introduced by Google. As the second method, a model is trained by a linear regression model for a gathered dataset of face pictures in different poses. In addition, a 3-DOF Agile Eye parallel robot is utilized to show the ability of this robot to be used as a system which is similar to a human head for performing a 3-DOF rotational motion pattern. Furthermore, a 3D printed face and a 2-DOF eye mechanism are fabricated to display the whole system more stylish way. Experimental tests, which are done based on a ROS platform, demonstrate the effectiveness of the proposed methods for tracking the human head and eye movement.