 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Driven Relocation Tracking in Dynamic Kitchen Environments
Paper and Code
Mar 03, 2025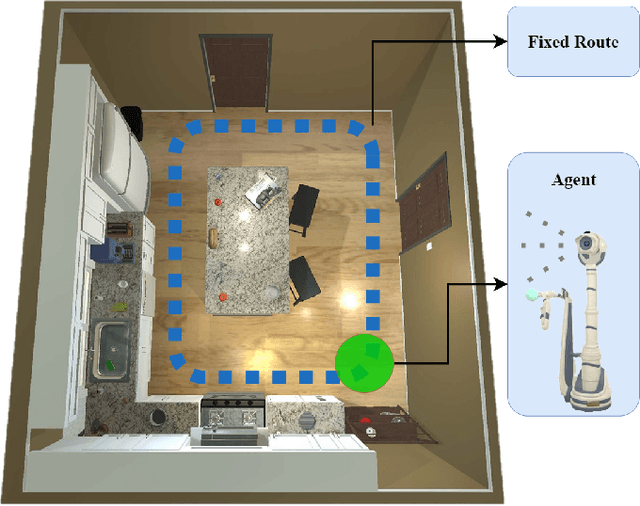

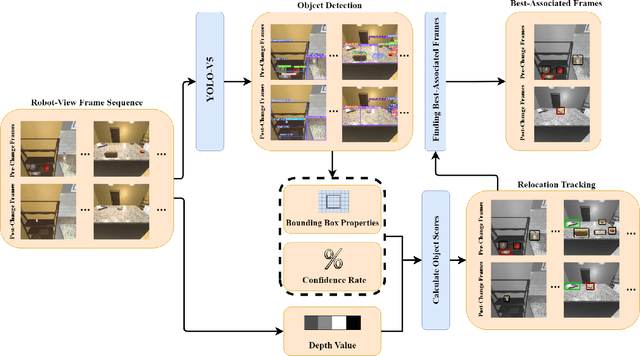
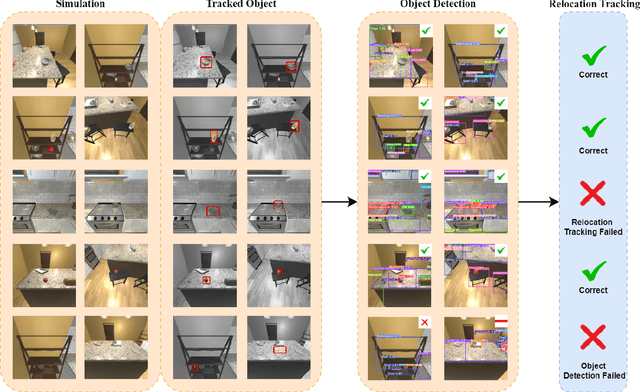
As smart homes become more prevalent in daily life, the ability to understand dynamic environments is essential which is increasingly dependent on AI systems. This study focuses on developing an intelligent algorithm which can navigate a robot through a kitchen, recognizing objects, and tracking their relocation. The kitchen was chosen as the testing ground due to its dynamic nature as objects are frequently moved, rearranged and replaced. Various techniques, such as SLAM feature-based tracking and deep learning-based object detection (e.g., Faster R-CNN), are commonly used for object tracking. Additionally, methods such as optical flow analysis and 3D reconstruction have also been used to track the relocation of objects. These approaches often face challenges when it comes to problems such as lighting variations and partial occlusions, where parts of the object are hidden in some frames but visible in others. The proposed method in this study leverages the YOLOv5 architecture, initialized with pre-trained weights and subsequently fine-tuned on a custom dataset. A novel method was developed, introducing a frame-scoring algorithm which calculates a score for each object based on its location and features within all frames. This scoring approach helps to identify changes by determining the best-associated frame for each object and comparing the results in each scene, overcoming limitations seen in other methods while maintaining simplicity in design. The experimental results demonstrate an accuracy of 97.72%, a precision of 95.83% and a recall of 96.84% for this algorithm, which highlights the efficacy of the model in detecting spatial changes.