 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX-Sim: Cross-Embodiment Learning via Real-to-Sim-to-Real
May 15, 2025Human videos offer a scalable way to train robot manipulation policies, but lack the action labels needed by standard imitation learning algorithms. Existing cross-embodiment approaches try to map human motion to robot actions, but often fail when the embodiments differ significantly. We propose X-Sim, a real-to-sim-to-real framework that uses object motion as a dense and transferable signal for learning robot policies. X-Sim starts by reconstructing a photorealistic simulation from an RGBD human video and tracking object trajectories to define object-centric rewards. These rewards are used to train a reinforcement learning (RL) policy in simulation. The learned policy is then distilled into an image-conditioned diffusion policy using synthetic rollouts rendered with varied viewpoints and lighting. To transfer to the real world, X-Sim introduces an online domain adaptation technique that aligns real and simulated observations during deployment. Importantly, X-Sim does not require any robot teleoperation data. We evaluate it across 5 manipulation tasks in 2 environments and show that it: (1) improves task progress by 30% on average over hand-tracking and sim-to-real baselines, (2) matches behavior cloning with 10x less data collection time, and (3) generalizes to new camera viewpoints and test-time changes. Code and videos are available at https://portal-cornell.github.io/X-Sim/.
APRICOT: Active Preference Learning and Constraint-Aware Task Planning with LLMs
Oct 25, 2024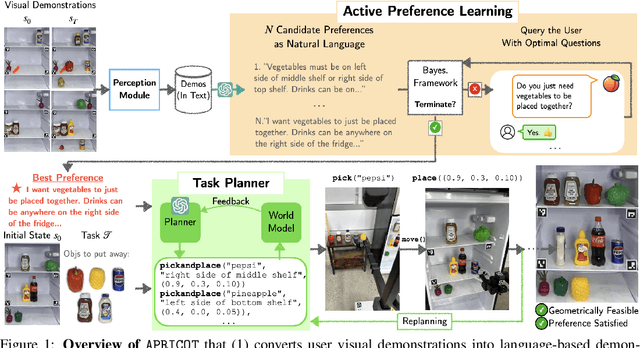
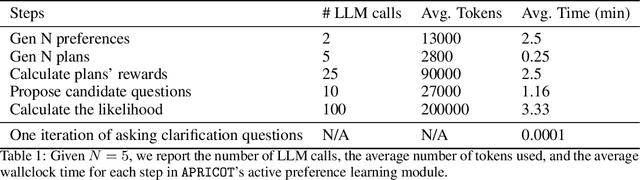
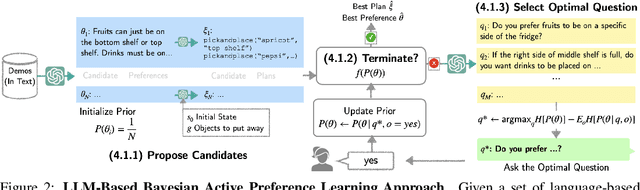

Home robots performing personalized tasks must adeptly balance user preferences with environmental affordances. We focus on organization tasks within constrained spaces, such as arranging items into a refrigerator, where preferences for placement collide with physical limitations. The robot must infer user preferences based on a small set of demonstrations, which is easier for users to provide than extensively defining all their requirements. While recent works use Large Language Models (LLMs) to learn preferences from user demonstrations, they encounter two fundamental challenges. First, there is inherent ambiguity in interpreting user actions, as multiple preferences can often explain a single observed behavior. Second, not all user preferences are practically feasible due to geometric constraints in the environment. To address these challenges, we introduce APRICOT, a novel approach that merges LLM-based Bayesian active preference learning with constraint-aware task planning. APRICOT refines its generated preferences by actively querying the user and dynamically adapts its plan to respect environmental constraints. We evaluate APRICOT on a dataset of diverse organization tasks and demonstrate its effectiveness in real-world scenarios, showing significant improvements in both preference satisfaction and plan feasibility. The project website is at https://portal-cornell.github.io/apricot/
MOSAIC: A Modular System for Assistive and Interactive Cooking
Feb 29, 2024We present MOSAIC, a modular architecture for home robots to perform complex collaborative tasks, such as cooking with everyday users. MOSAIC tightly collaborates with humans, interacts with users using natural language, coordinates multiple robots, and manages an open vocabulary of everyday objects. At its core, MOSAIC employs modularity: it leverages multiple large-scale pre-trained models for general tasks like language and image recognition, while using streamlined modules designed for task-specific control. We extensively evaluate MOSAIC on 60 end-to-end trials where two robots collaborate with a human user to cook a combination of 6 recipes. We also extensively test individual modules with 180 episodes of visuomotor picking, 60 episodes of human motion forecasting, and 46 online user evaluations of the task planner. We show that MOSAIC is able to efficiently collaborate with humans by running the overall system end-to-end with a real human user, completing 68.3% (41/60) collaborative cooking trials of 6 different recipes with a subtask completion rate of 91.6%. Finally, we discuss the limitations of the current system and exciting open challenges in this domain. The project's website is at https://portal-cornell.github.io/MOSAIC/