 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Flow-based Credibility Metric for Safety-critical Pedestrian Detection
Feb 12, 2024Safety is of utmost importance for perception in automated driving (AD). However, a prime safety concern in state-of-the art object detection is that standard evaluation schemes utilize safety-agnostic metrics to argue sufficient detection performance. Hence, it is imperative to leverage supplementary domain knowledge to accentuate safety-critical misdetections during evaluation tasks. To tackle the underspecification, this paper introduces a novel credibility metric, called c-flow, for pedestrian bounding boxes. To this end, c-flow relies on a complementary optical flow signal from image sequences and enhances the analyses of safety-critical misdetections without requiring additional labels. We implement and evaluate c-flow with a state-of-the-art pedestrian detector on a large AD dataset. Our analysis demonstrates that c-flow allows developers to identify safety-critical misdetections.
Deep Learning Safety Concerns in Automated Driving Perception
Sep 07, 2023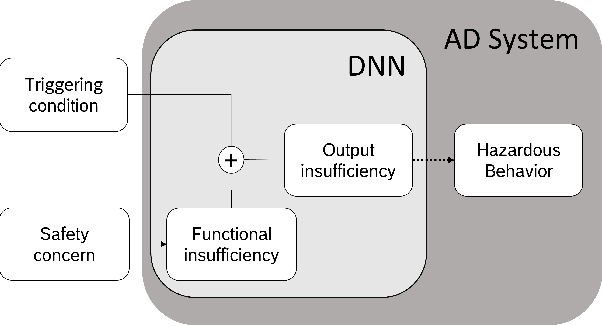
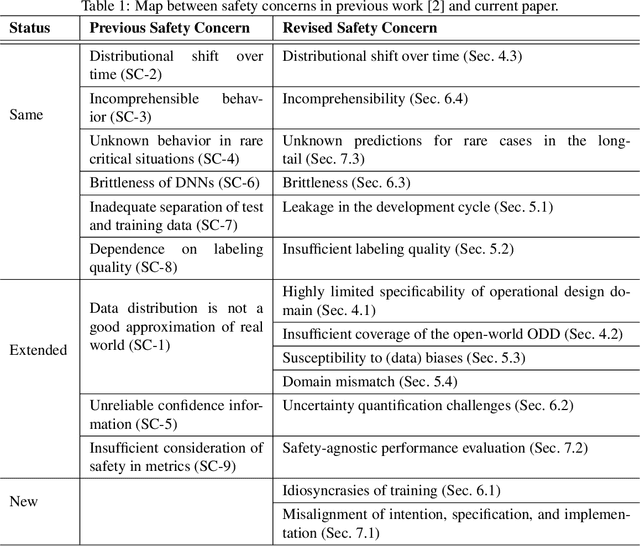
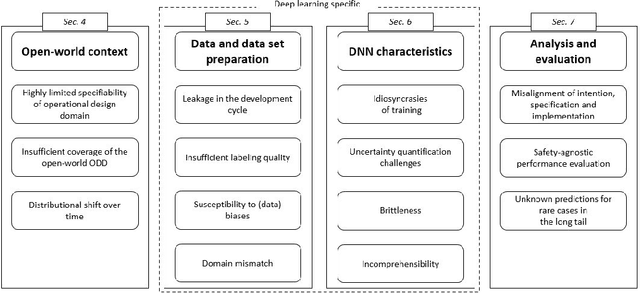
Recent advances in the field of deep learning and impressive performance of deep neural networks (DNNs) for perception have resulted in an increased demand for their use in automated driving (AD) systems. The safety of such systems is of utmost importance and thus requires to consider the unique properties of DNNs. In order to achieve safety of AD systems with DNN-based perception components in a systematic and comprehensive approach, so-called safety concerns have been introduced as a suitable structuring element. On the one hand, the concept of safety concerns is -- by design -- well aligned to existing standards relevant for safety of AD systems such as ISO 21448 (SOTIF). On the other hand, it has already inspired several academic publications and upcoming standards on AI safety such as ISO PAS 8800. While the concept of safety concerns has been previously introduced, this paper extends and refines it, leveraging feedback from various domain and safety experts in the field. In particular, this paper introduces an additional categorization for a better understanding as well as enabling cross-functional teams to jointly address the concerns.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.