 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgGym: An agricultural biotic stress simulation environment for ultra-precision management planning
Sep 01, 2024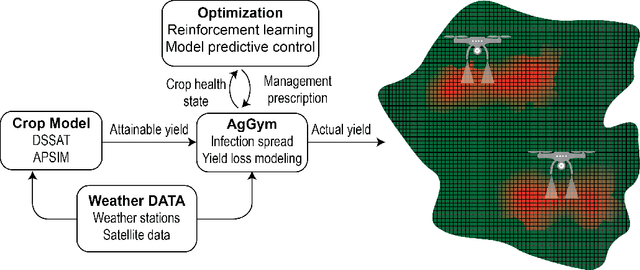
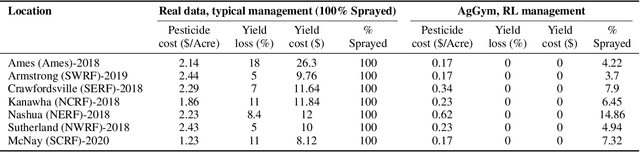
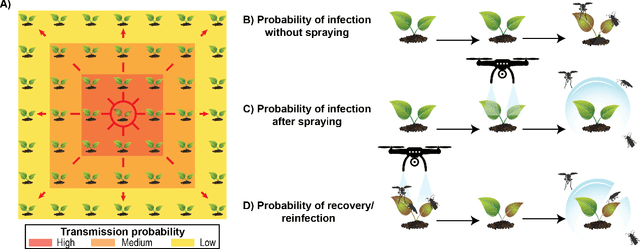
Agricultural production requires careful management of inputs such as fungicides, insecticides, and herbicides to ensure a successful crop that is high-yielding, profitable, and of superior seed quality. Current state-of-the-art field crop management relies on coarse-scale crop management strategies, where entire fields are sprayed with pest and disease-controlling chemicals, leading to increased cost and sub-optimal soil and crop management. To overcome these challenges and optimize crop production, we utilize machine learning tools within a virtual field environment to generate localized management plans for farmers to manage biotic threats while maximizing profits. Specifically, we present AgGym, a modular, crop and stress agnostic simulation framework to model the spread of biotic stresses in a field and estimate yield losses with and without chemical treatments. Our validation with real data shows that AgGym can be customized with limited data to simulate yield outcomes under various biotic stress conditions. We further demonstrate that deep reinforcement learning (RL) policies can be trained using AgGym for designing ultra-precise biotic stress mitigation strategies with potential to increase yield recovery with less chemicals and lower cost. Our proposed framework enables personalized decision support that can transform biotic stress management from being schedule based and reactive to opportunistic and prescriptive. We also release the AgGym software implementation as a community resource and invite experts to contribute to this open-sourced publicly available modular environment framework. The source code can be accessed at: https://github.com/SCSLabISU/AgGym.
Design and Implementation of Smart Infrastructures and Connected Vehicles in A Mini-city Platform
Aug 08, 2024



This paper presents a 1/10th scale mini-city platform used as a testing bed for evaluating autonomous and connected vehicles. Using the mini-city platform, we can evaluate different driving scenarios including human-driven and autonomous driving. We provide a unique, visual feature-rich environment for evaluating computer vision methods. The conducted experiments utilize onboard sensors mounted on a robotic platform we built, allowing them to navigate in a controlled real-world urban environment. The designed city is occupied by cars, stop signs, a variety of residential and business buildings, and complex intersections mimicking an urban area. Furthermore, We have designed an intelligent infrastructure at one of the intersections in the city which helps safer and more efficient navigation in the presence of multiple cars and pedestrians. We have used the mini-city platform for the analysis of three different applications: city mapping, depth estimation in challenging occluded environments, and smart infrastructure for connected vehicles. Our smart infrastructure is among the first to develop and evaluate Vehicle-to-Infrastructure (V2I) communication at intersections. The intersection-related result shows how inaccuracy in perception, including mapping and localization, can affect safety. The proposed mini-city platform can be considered as a baseline environment for developing research and education in intelligent transportation systems.