 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Do What Doesn't Matter: Intrinsic Motivation with Action Usefulness
May 31, 2021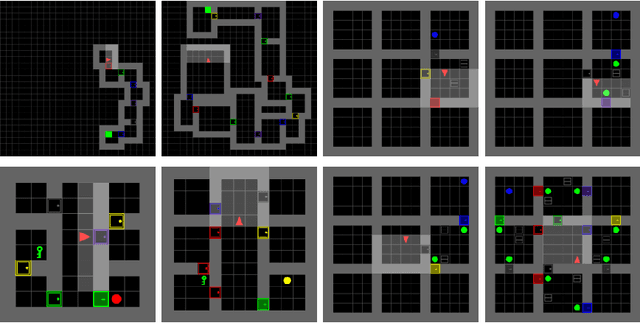
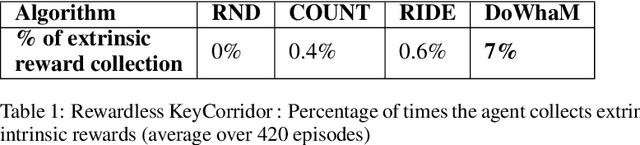
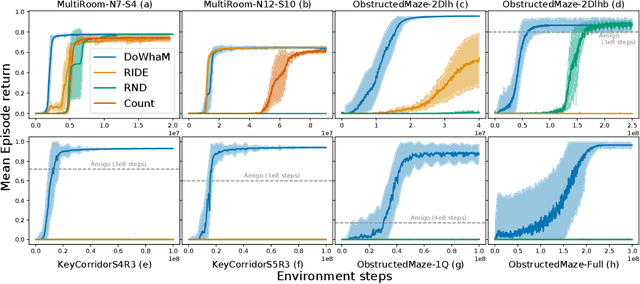
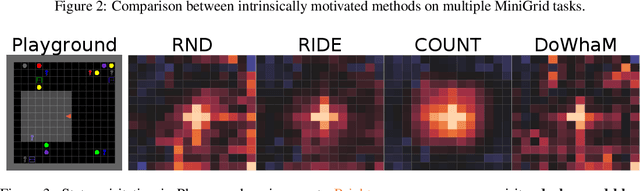
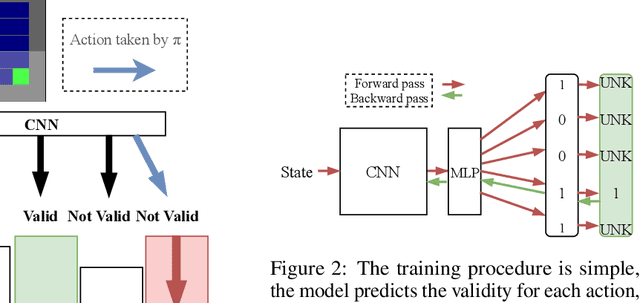
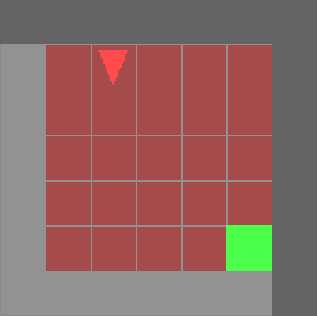
Sparse rewards are double-edged training signals in reinforcement learning: easy to design but hard to optimize. Intrinsic motivation guidances have thus been developed toward alleviating the resulting exploration problem. They usually incentivize agents to look for new states through novelty signals. Yet, such methods encourage exhaustive exploration of the state space rather than focusing on the environment's salient interaction opportunities. We propose a new exploration method, called Don't Do What Doesn't Matter (DoWhaM), shifting the emphasis from state novelty to state with relevant actions. While most actions consistently change the state when used, \textit{e.g.} moving the agent, some actions are only effective in specific states, \textit{e.g.}, \emph{opening} a door, \emph{grabbing} an object. DoWhaM detects and rewards actions that seldom affect the environment. We evaluate DoWhaM on the procedurally-generated environment MiniGrid, against state-of-the-art methods and show that DoWhaM greatly reduces sample complexity.
A Machine of Few Words -- Interactive Speaker Recognition with Reinforcement Learning
Aug 07, 2020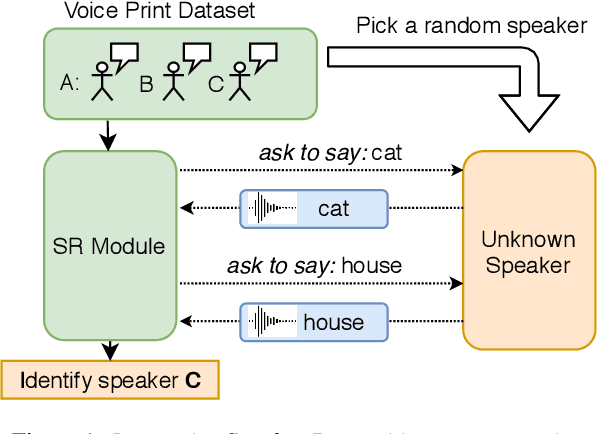
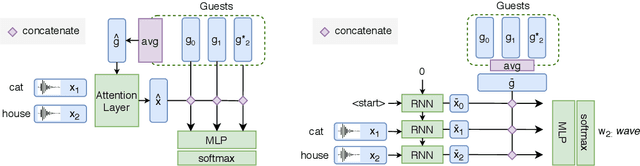
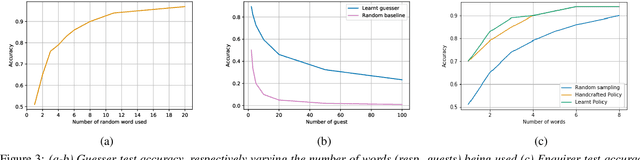
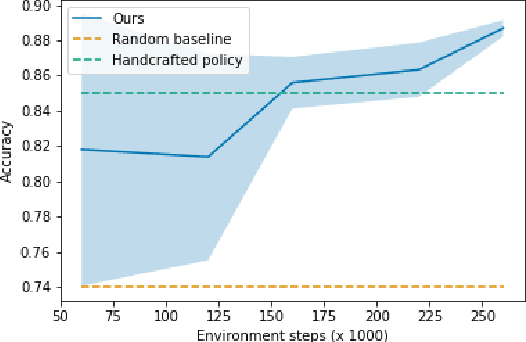
Speaker recognition is a well known and studied task in the speech processing domain. It has many applications, either for security or speaker adaptation of personal devices. In this paper, we present a new paradigm for automatic speaker recognition that we call Interactive Speaker Recognition (ISR). In this paradigm, the recognition system aims to incrementally build a representation of the speakers by requesting personalized utterances to be spoken in contrast to the standard text-dependent or text-independent schemes. To do so, we cast the speaker recognition task into a sequential decision-making problem that we solve with Reinforcement Learning. Using a standard dataset, we show that our method achieves excellent performance while using little speech signal amounts. This method could also be applied as an utterance selection mechanism for building speech synthesis systems.
Self-Educated Language Agent With Hindsight Experience Replay For Instruction Following
Oct 21, 2019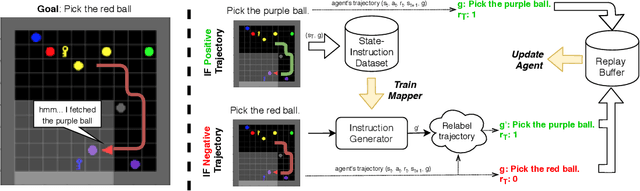

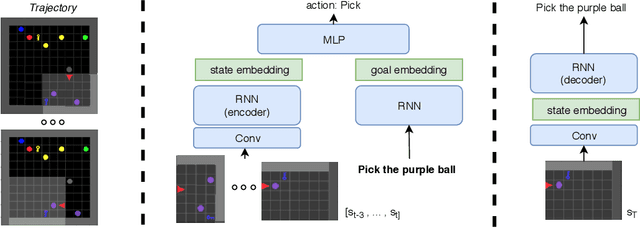
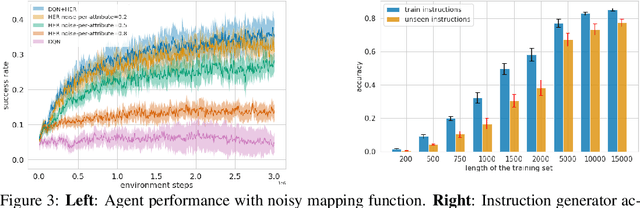
Language creates a compact representation of the world and allows the description of unlimited situations and objectives through compositionality. These properties make it a natural fit to guide the training of interactive agents as it could ease recurrent challenges in Reinforcement Learning such as sample complexity, generalization, or multi-tasking. Yet, it remains an open-problem to relate language and RL in even simple instruction following scenarios. Current methods rely on expert demonstrations, auxiliary losses, or inductive biases in neural architectures. In this paper, we propose an orthogonal approach called Textual Hindsight Experience Replay (THER) that extends the Hindsight Experience Replay approach to the language setting. Whenever the agent does not fulfill its instruction, THER learns to output a new directive that matches the agent trajectory, and it relabels the episode with a positive reward. To do so, THER learns to map a state into an instruction by using past successful trajectories, which removes the need to have external expert interventions to relabel episodes as in vanilla HER. We observe that this simple idea also initiates a learning synergy between language acquisition and policy learning on instruction following tasks in the BabyAI environment.
"I'm sorry Dave, I'm afraid I can't do that" Deep Q-learning from forbidden action
Oct 04, 2019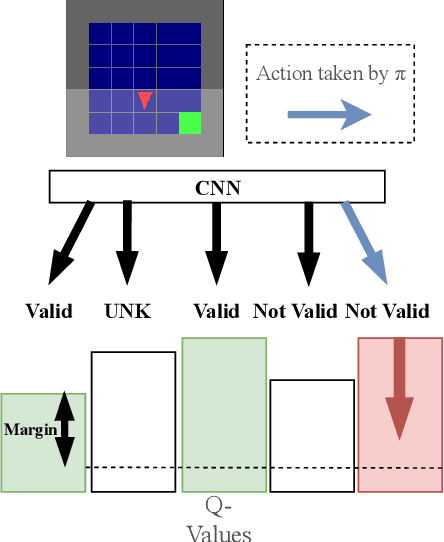
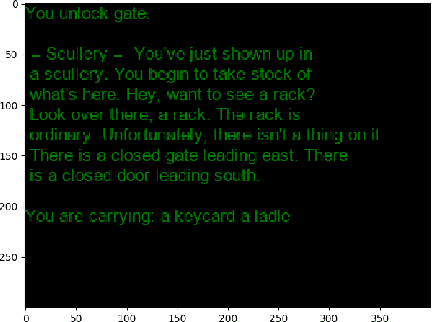
The use of Reinforcement Learning (RL) is still restricted to simulation or to enhance human-operated systems through recommendations. Real-world environments (e.g. industrial robots or power grids) are generally designed with safety constraints in mind implemented in the shape of valid actions masks or contingency controllers. For example, the range of motion and the angles of the motors of a robot can be limited to physical boundaries. Violating constraints thus results in rejected actions or entering in a safe mode driven by an external controller, making RL agents incapable of learning from their mistakes. In this paper, we propose a simple modification of a state-of-the-art deep RL algorithm (DQN), enabling learning from forbidden actions. To do so, the standard Q-learning update is enhanced with an extra safety loss inspired by structured classification. We empirically show that it reduces the number of hit constraints during the learning phase and accelerates convergence to near-optimal policies compared to using standard DQN. Experiments are done on a Visual Grid World Environment and Text-World domain.
Visual Reasoning with Multi-hop Feature Modulation
Oct 12, 2018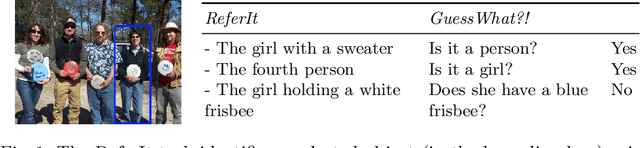
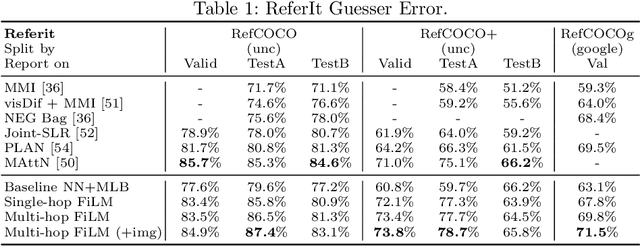
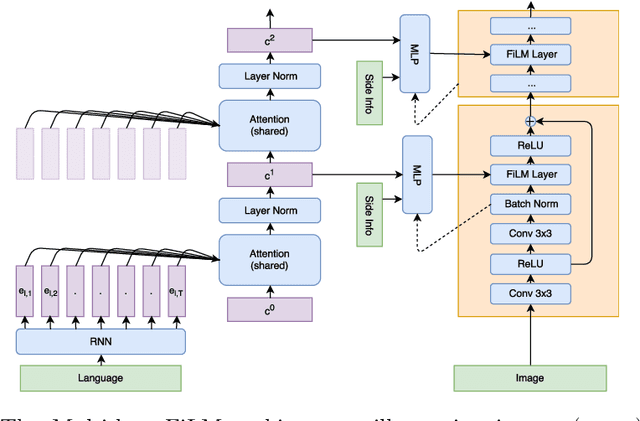
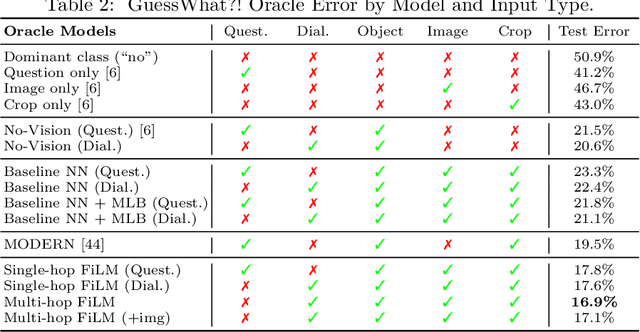
Recent breakthroughs in computer vision and natural language processing have spurred interest in challenging multi-modal tasks such as visual question-answering and visual dialogue. For such tasks, one successful approach is to condition image-based convolutional network computation on language via Feature-wise Linear Modulation (FiLM) layers, i.e., per-channel scaling and shifting. We propose to generate the parameters of FiLM layers going up the hierarchy of a convolutional network in a multi-hop fashion rather than all at once, as in prior work. By alternating between attending to the language input and generating FiLM layer parameters, this approach is better able to scale to settings with longer input sequences such as dialogue. We demonstrate that multi-hop FiLM generation achieves state-of-the-art for the short input sequence task ReferIt --- on-par with single-hop FiLM generation --- while also significantly outperforming prior state-of-the-art and single-hop FiLM generation on the GuessWhat?! visual dialogue task.
Unsupervised state representation learning with robotic priors: a robustness benchmark
Sep 15, 2017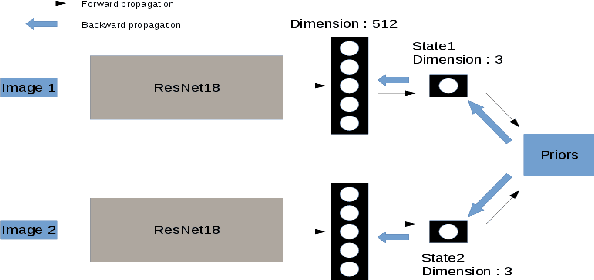
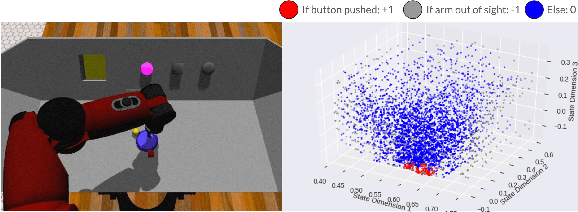
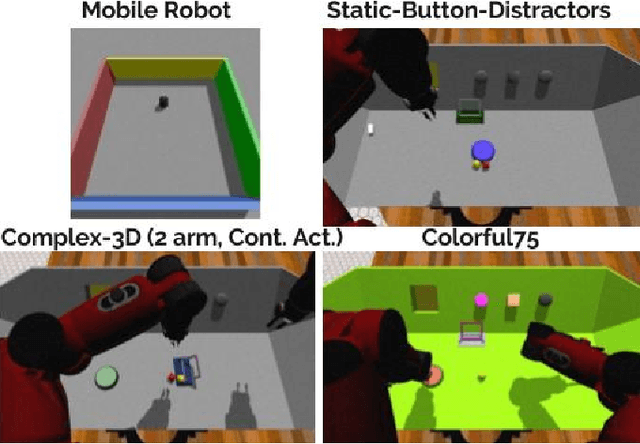
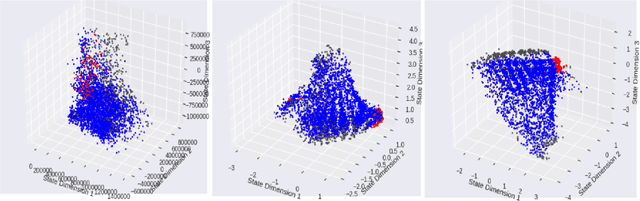
Our understanding of the world depends highly on our capacity to produce intuitive and simplified representations which can be easily used to solve problems. We reproduce this simplification process using a neural network to build a low dimensional state representation of the world from images acquired by a robot. As in Jonschkowski et al. 2015, we learn in an unsupervised way using prior knowledge about the world as loss functions called robotic priors and extend this approach to high dimension richer images to learn a 3D representation of the hand position of a robot from RGB images. We propose a quantitative evaluation of the learned representation using nearest neighbors in the state space that allows to assess its quality and show both the potential and limitations of robotic priors in realistic environments. We augment image size, add distractors and domain randomization, all crucial components to achieve transfer learning to real robots. Finally, we also contribute a new prior to improve the robustness of the representation. The applications of such low dimensional state representation range from easing reinforcement learning (RL) and knowledge transfer across tasks, to facilitating learning from raw data with more efficient and compact high level representations. The results show that the robotic prior approach is able to extract high level representation as the 3D position of an arm and organize it into a compact and coherent space of states in a challenging dataset.