 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Channel Swin Transformer Framework for Bearing Remaining Useful Life Prediction
May 20, 2025Precise estimation of the Remaining Useful Life (RUL) of rolling bearings is an important consideration to avoid unexpected failures, reduce downtime, and promote safety and efficiency in industrial systems. Complications in degradation trends, noise presence, and the necessity to detect faults in advance make estimation of RUL a challenging task. This paper introduces a novel framework that combines wavelet-based denoising method, Wavelet Packet Decomposition (WPD), and a customized multi-channel Swin Transformer model (MCSFormer) to address these problems. With attention mechanisms incorporated for feature fusion, the model is designed to learn global and local degradation patterns utilizing hierarchical representations for enhancing predictive performance. Additionally, a customized loss function is developed as a key distinction of this work to differentiate between early and late predictions, prioritizing accurate early detection and minimizing the high operation risks of late predictions. The proposed model was evaluated with the PRONOSTIA dataset using three experiments. Intra-condition experiments demonstrated that MCSFormer outperformed state-of-the-art models, including the Adaptive Transformer, MDAN, and CNN-SRU, achieving 41%, 64%, and 69% lower MAE on average across different operating conditions, respectively. In terms of cross-condition testing, it achieved superior generalization under varying operating conditions compared to the adapted ViT and Swin Transformer. Lastly, the custom loss function effectively reduced late predictions, as evidenced in a 6.3% improvement in the scoring metric while maintaining competitive overall performance. The model's robust noise resistance, generalization capability, and focus on safety make MCSFormer a trustworthy and effective predictive maintenance tool in industrial applications.
Feature-Weighted MMD-CORAL for Domain Adaptation in Power Transformer Fault Diagnosis
May 20, 2025



Ensuring the reliable operation of power transformers is critical to grid stability. Dissolved Gas Analysis (DGA) is widely used for fault diagnosis, but traditional methods rely on heuristic rules, which may lead to inconsistent results. Machine learning (ML)-based approaches have improved diagnostic accuracy; however, power transformers operate under varying conditions, and differences in transformer type, environmental factors, and operational settings create distribution shifts in diagnostic data. Consequently, direct model transfer between transformers often fails, making techniques for domain adaptation a necessity. To tackle this issue, this work proposes a feature-weighted domain adaptation technique that combines Maximum Mean Discrepancy (MMD) and Correlation Alignment (CORAL) with feature-specific weighting (MCW). Kolmogorov-Smirnov (K-S) statistics are used to assign adaptable weights, prioritizing features with larger distributional discrepancies and thereby improving source and target domain alignment. Experimental evaluations on datasets for power transformers demonstrate the effectiveness of the proposed method, which achieves a 7.9% improvement over Fine-Tuning and a 2.2% improvement over MMD-CORAL (MC). Furthermore, it outperforms both techniques across various training sample sizes, confirming its robustness for domain adaptation.
FORLAPS: An Innovative Data-Driven Reinforcement Learning Approach for Prescriptive Process Monitoring
Jan 17, 2025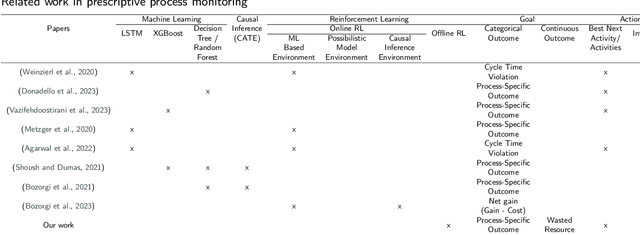
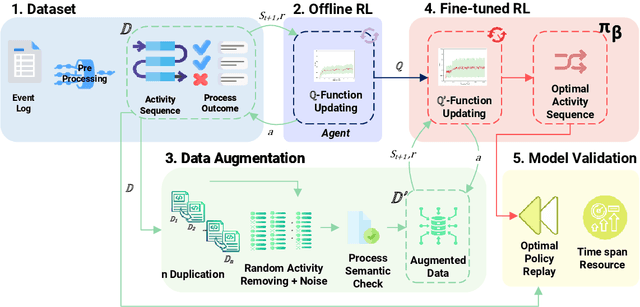

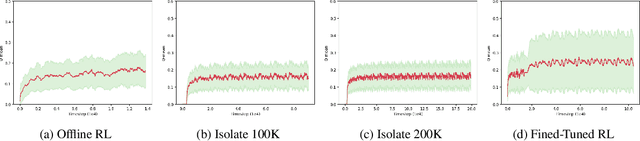
We present a novel 5-step framework called Fine-Tuned Offline Reinforcement Learning Augmented Process Sequence Optimization (FORLAPS), which aims to identify optimal execution paths in business processes using reinforcement learning. We implemented this approach on real-life event logs from our case study an energy regulator in Canada and other real-life event logs, demonstrating the feasibility of the proposed method. Additionally, to compare FORLAPS with the existing models (Permutation Feature Importance and multi-task LSTM-Based model), we experimented to evaluate its effectiveness in terms of resource savings and process time span reduction. The experimental results on real-life event log validate that FORLAPS achieves 31% savings in resource time spent and a 23% reduction in process time span. Using this innovative data augmentation technique, we propose a fine-tuned reinforcement learning approach that aims to automatically fine-tune the model by selectively increasing the average estimated Q-value in the sampled batches. The results show that we obtained a 44% performance improvement compared to the pre-trained model. This study introduces an innovative evaluation model, benchmarking its performance against earlier works using nine publicly available datasets. Robustness is ensured through experiments utilizing the Damerau-Levenshtein distance as the primary metric. In addition, we discussed the suitability of datasets, taking into account their inherent properties, to evaluate the performance of different models. The proposed model, FORLAPS, demonstrated exceptional performance, outperforming existing state-of-the-art approaches in suggesting the most optimal policies or predicting the best next activities within a process trace.
Condition Monitoring with Incomplete Data: An Integrated Variational Autoencoder and Distance Metric Framework
Apr 08, 2024



Condition monitoring of industrial systems is crucial for ensuring safety and maintenance planning, yet notable challenges arise in real-world settings due to the limited or non-existent availability of fault samples. This paper introduces an innovative solution to this problem by proposing a new method for fault detection and condition monitoring for unseen data. Adopting an approach inspired by zero-shot learning, our method can identify faults and assign a relative health index to various operational conditions. Typically, we have plenty of data on normal operations, some data on compromised conditions, and very few (if any) samples of severe faults. We use a variational autoencoder to capture the probabilistic distribution of previously seen and new unseen conditions. The health status is determined by comparing each sample's deviation from a normal operation reference distribution in the latent space. Faults are detected by establishing a threshold for the health indexes, allowing the model to identify severe, unseen faults with high accuracy, even amidst noise. We validate our approach using the run-to-failure IMS-bearing dataset and compare it with other methods. The health indexes generated by our model closely match the established descriptive model of bearing wear, attesting to the robustness and reliability of our method. These findings highlight the potential of our methodology in augmenting fault detection capabilities within industrial domains, thereby contributing to heightened safety protocols and optimized maintenance practices.
Deep reinforcement learning for machine scheduling: Methodology, the state-of-the-art, and future directions
Oct 04, 2023Machine scheduling aims to optimize job assignments to machines while adhering to manufacturing rules and job specifications. This optimization leads to reduced operational costs, improved customer demand fulfillment, and enhanced production efficiency. However, machine scheduling remains a challenging combinatorial problem due to its NP-hard nature. Deep Reinforcement Learning (DRL), a key component of artificial general intelligence, has shown promise in various domains like gaming and robotics. Researchers have explored applying DRL to machine scheduling problems since 1995. This paper offers a comprehensive review and comparison of DRL-based approaches, highlighting their methodology, applications, advantages, and limitations. It categorizes these approaches based on computational components: conventional neural networks, encoder-decoder architectures, graph neural networks, and metaheuristic algorithms. Our review concludes that DRL-based methods outperform exact solvers, heuristics, and tabular reinforcement learning algorithms in terms of computation speed and generating near-global optimal solutions. These DRL-based approaches have been successfully applied to static and dynamic scheduling across diverse machine environments and job characteristics. However, DRL-based schedulers face limitations in handling complex operational constraints, configurable multi-objective optimization, generalization, scalability, interpretability, and robustness. Addressing these challenges will be a crucial focus for future research in this field. This paper serves as a valuable resource for researchers to assess the current state of DRL-based machine scheduling and identify research gaps. It also aids experts and practitioners in selecting the appropriate DRL approach for production scheduling.
Synthesizing Rolling Bearing Fault Samples in New Conditions: A framework based on a modified CGAN
Jun 29, 2022
Bearings are one of the vital components of rotating machines that are prone to unexpected faults. Therefore, bearing fault diagnosis and condition monitoring is essential for reducing operational costs and downtime in numerous industries. In various production conditions, bearings can be operated under a range of loads and speeds, which causes different vibration patterns associated with each fault type. Normal data is ample as systems usually work in desired conditions. On the other hand, fault data is rare, and in many conditions, there is no data recorded for the fault classes. Accessing fault data is crucial for developing data-driven fault diagnosis tools that can improve both the performance and safety of operations. To this end, a novel algorithm based on Conditional Generative Adversarial Networks (CGANs) is introduced. Trained on the normal and fault data on any actual fault conditions, this algorithm generates fault data from normal data of target conditions. The proposed method is validated on a real-world bearing dataset, and fault data are generated for different conditions. Several state-of-the-art classifiers and visualization models are implemented to evaluate the quality of the synthesized data. The results demonstrate the efficacy of the proposed algorithm.