 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Intelligent Framework for Uncertainty-Aware Condition Monitoring of Industrial Systems
Apr 10, 2026Hybrid approaches that combine data-driven learning with physics-based insight have shown promise for improving the reliability of industrial condition monitoring. This work develops a hybrid condition monitoring framework that integrates primary sensor measurements, lagged temporal features, and physics-informed residuals derived from nominal surrogate models. Two hybrid integration strategies are examined. The first is a feature-level fusion approach that augments the input space with residual and temporal information. The second is a model-level ensemble approach in which machine learning classifiers trained on different feature types are combined at the decision level. Both hybrid approaches of the condition monitoring framework are evaluated on a continuous stirred-tank reactor (CSTR) benchmark using several machine learning models and ensemble configurations. Both feature-level and model-level hybridization improve diagnostic accuracy relative to single-source baselines, with the best model-level ensemble achieving a 2.9\% improvement over the best baseline ensemble. To assess predictive reliability, conformal prediction is applied to quantify coverage, prediction-set size, and abstention behavior. The results show that hybrid integration enhances uncertainty management, producing smaller and well-calibrated prediction sets at matched coverage levels. These findings demonstrate that lightweight physics-informed residuals, temporal augmentation, and ensemble learning can be combined effectively to improve both accuracy and decision reliability in nonlinear industrial systems.
A Study of the Framework and Real-World Applications of Language Embedding for 3D Scene Understanding
Aug 07, 2025Gaussian Splatting has rapidly emerged as a transformative technique for real-time 3D scene representation, offering a highly efficient and expressive alternative to Neural Radiance Fields (NeRF). Its ability to render complex scenes with high fidelity has enabled progress across domains such as scene reconstruction, robotics, and interactive content creation. More recently, the integration of Large Language Models (LLMs) and language embeddings into Gaussian Splatting pipelines has opened new possibilities for text-conditioned generation, editing, and semantic scene understanding. Despite these advances, a comprehensive overview of this emerging intersection has been lacking. This survey presents a structured review of current research efforts that combine language guidance with 3D Gaussian Splatting, detailing theoretical foundations, integration strategies, and real-world use cases. We highlight key limitations such as computational bottlenecks, generalizability, and the scarcity of semantically annotated 3D Gaussian data and outline open challenges and future directions for advancing language-guided 3D scene understanding using Gaussian Splatting.
From Flight to Insight: Semantic 3D Reconstruction for Aerial Inspection via Gaussian Splatting and Language-Guided Segmentation
May 23, 2025High-fidelity 3D reconstruction is critical for aerial inspection tasks such as infrastructure monitoring, structural assessment, and environmental surveying. While traditional photogrammetry techniques enable geometric modeling, they lack semantic interpretability, limiting their effectiveness for automated inspection workflows. Recent advances in neural rendering and 3D Gaussian Splatting (3DGS) offer efficient, photorealistic reconstructions but similarly lack scene-level understanding. In this work, we present a UAV-based pipeline that extends Feature-3DGS for language-guided 3D segmentation. We leverage LSeg-based feature fields with CLIP embeddings to generate heatmaps in response to language prompts. These are thresholded to produce rough segmentations, and the highest-scoring point is then used as a prompt to SAM or SAM2 for refined 2D segmentation on novel view renderings. Our results highlight the strengths and limitations of various feature field backbones (CLIP-LSeg, SAM, SAM2) in capturing meaningful structure in large-scale outdoor environments. We demonstrate that this hybrid approach enables flexible, language-driven interaction with photorealistic 3D reconstructions, opening new possibilities for semantic aerial inspection and scene understanding.
Condition Monitoring with Incomplete Data: An Integrated Variational Autoencoder and Distance Metric Framework
Apr 08, 2024



Condition monitoring of industrial systems is crucial for ensuring safety and maintenance planning, yet notable challenges arise in real-world settings due to the limited or non-existent availability of fault samples. This paper introduces an innovative solution to this problem by proposing a new method for fault detection and condition monitoring for unseen data. Adopting an approach inspired by zero-shot learning, our method can identify faults and assign a relative health index to various operational conditions. Typically, we have plenty of data on normal operations, some data on compromised conditions, and very few (if any) samples of severe faults. We use a variational autoencoder to capture the probabilistic distribution of previously seen and new unseen conditions. The health status is determined by comparing each sample's deviation from a normal operation reference distribution in the latent space. Faults are detected by establishing a threshold for the health indexes, allowing the model to identify severe, unseen faults with high accuracy, even amidst noise. We validate our approach using the run-to-failure IMS-bearing dataset and compare it with other methods. The health indexes generated by our model closely match the established descriptive model of bearing wear, attesting to the robustness and reliability of our method. These findings highlight the potential of our methodology in augmenting fault detection capabilities within industrial domains, thereby contributing to heightened safety protocols and optimized maintenance practices.
Extended Reality for Enhanced Human-Robot Collaboration: a Human-in-the-Loop Approach
Mar 21, 2024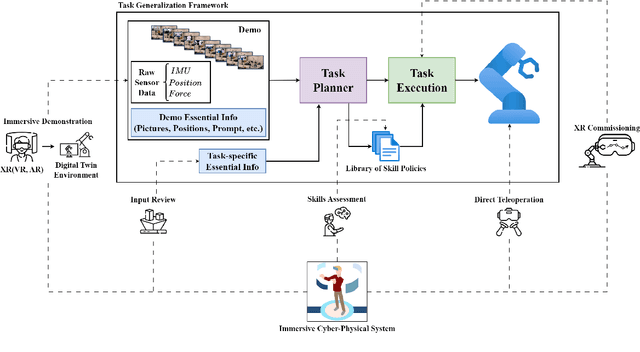

The rise of automation has provided an opportunity to achieve higher efficiency in manufacturing processes, yet it often compromises the flexibility required to promptly respond to evolving market needs and meet the demand for customization. Human-robot collaboration attempts to tackle these challenges by combining the strength and precision of machines with human ingenuity and perceptual understanding. In this paper, we conceptualize and propose an implementation framework for an autonomous, machine learning-based manipulator that incorporates human-in-the-loop principles and leverages Extended Reality (XR) to facilitate intuitive communication and programming between humans and robots. Furthermore, the conceptual framework foresees human involvement directly in the robot learning process, resulting in higher adaptability and task generalization. The paper highlights key technologies enabling the proposed framework, emphasizing the importance of developing the digital ecosystem as a whole. Additionally, we review the existent implementation approaches of XR in human-robot collaboration, showcasing diverse perspectives and methodologies. The challenges and future outlooks are discussed, delving into the major obstacles and potential research avenues of XR for more natural human-robot interaction and integration in the industrial landscape.
A mathematical model for simultaneous personnel shift planning and unrelated parallel machine scheduling
Feb 24, 2024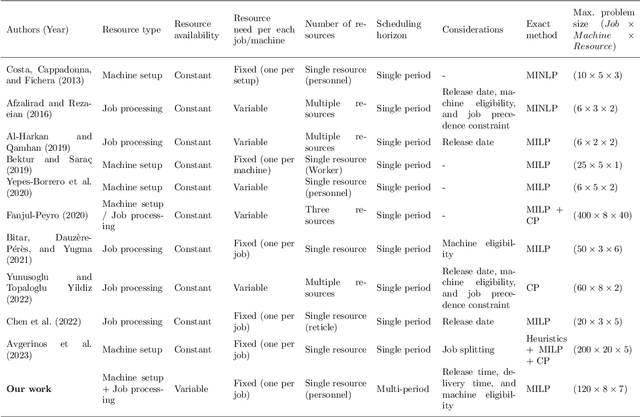
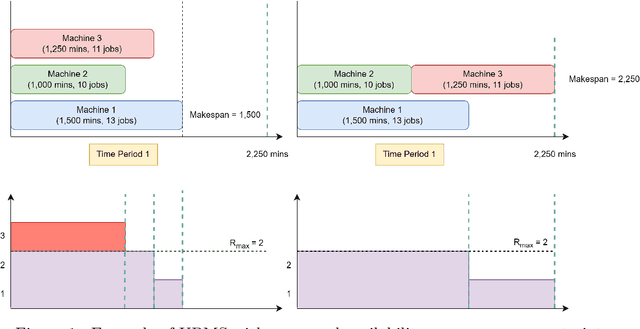
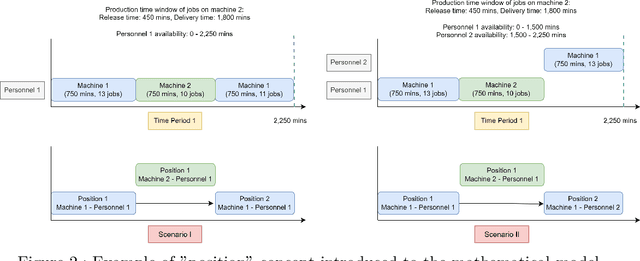
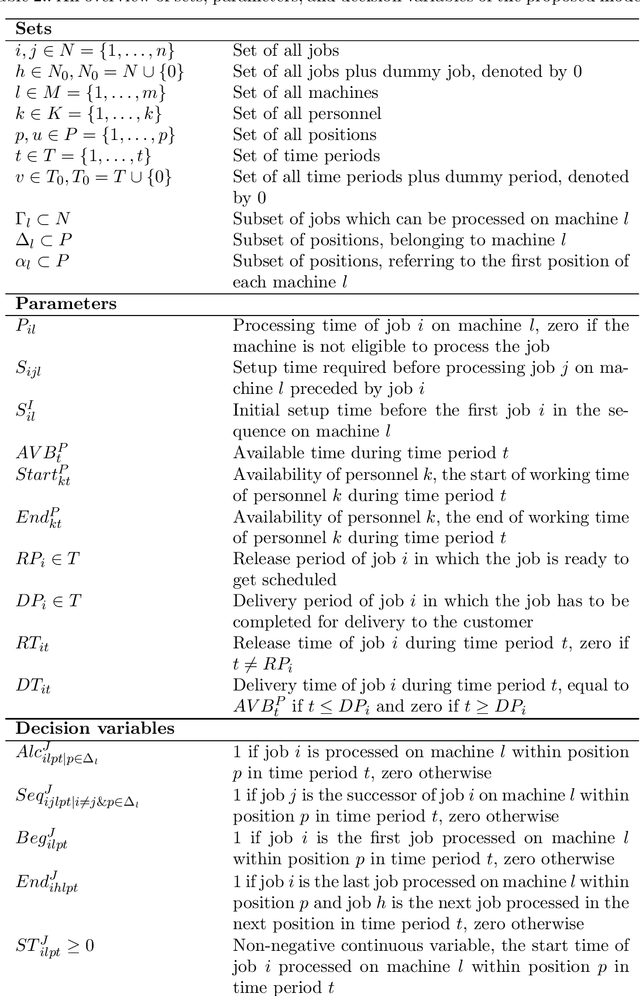
This paper addresses a production scheduling problem derived from an industrial use case, focusing on unrelated parallel machine scheduling with the personnel availability constraint. The proposed model optimizes the production plan over a multi-period scheduling horizon, accommodating variations in personnel shift hours within each time period. It assumes shared personnel among machines, with one personnel required per machine for setup and supervision during job processing. Available personnel are fewer than the machines, thus limiting the number of machines that can operate in parallel. The model aims to minimize the total production time considering machine-dependent processing times and sequence-dependent setup times. The model handles practical scenarios like machine eligibility constraints and production time windows. A Mixed Integer Linear Programming (MILP) model is introduced to formulate the problem, taking into account both continuous and district variables. A two-step solution approach enhances computational speed, first maximizing accepted jobs and then minimizing production time. Validation with synthetic problem instances and a real industrial case study of a food processing plant demonstrates the performance of the model and its usefulness in personnel shift planning. The findings offer valuable insights for practical managerial decision-making in the context of production scheduling.
Deep reinforcement learning for machine scheduling: Methodology, the state-of-the-art, and future directions
Oct 04, 2023Machine scheduling aims to optimize job assignments to machines while adhering to manufacturing rules and job specifications. This optimization leads to reduced operational costs, improved customer demand fulfillment, and enhanced production efficiency. However, machine scheduling remains a challenging combinatorial problem due to its NP-hard nature. Deep Reinforcement Learning (DRL), a key component of artificial general intelligence, has shown promise in various domains like gaming and robotics. Researchers have explored applying DRL to machine scheduling problems since 1995. This paper offers a comprehensive review and comparison of DRL-based approaches, highlighting their methodology, applications, advantages, and limitations. It categorizes these approaches based on computational components: conventional neural networks, encoder-decoder architectures, graph neural networks, and metaheuristic algorithms. Our review concludes that DRL-based methods outperform exact solvers, heuristics, and tabular reinforcement learning algorithms in terms of computation speed and generating near-global optimal solutions. These DRL-based approaches have been successfully applied to static and dynamic scheduling across diverse machine environments and job characteristics. However, DRL-based schedulers face limitations in handling complex operational constraints, configurable multi-objective optimization, generalization, scalability, interpretability, and robustness. Addressing these challenges will be a crucial focus for future research in this field. This paper serves as a valuable resource for researchers to assess the current state of DRL-based machine scheduling and identify research gaps. It also aids experts and practitioners in selecting the appropriate DRL approach for production scheduling.
Anomaly Detection in Automated Fibre Placement: Learning with Data Limitations
Jul 15, 2023



Current defect detection systems for Automated Fibre Placement (AFP) are mostly based on end-to-end supervised learning methods requiring abundant labelled defective samples, which are not easily generated in sufficient numbers. To address this data scarcity problem, we introduce an autoencoder-based approach compatible with small datasets. Fortunately, the problem from a foundational point of view can be simplified as a binary classification between normal and abnormal samples. The proposed approach uses a depth map of the fibre layup surface, split into small windows aligned to each composite strip (tow). A subset of these windows that do not contain anomalies is passed to an autoencoder to reconstruct the input. Because the autoencoder is trained with normal samples, it produces more accurate reconstructions for these samples than for abnormal ones. Therefore, the value of reconstruction error is used as a quantitative metric for whether there are potential anomalies. These values are combined to produce an anomaly map, which can localize the manufacturing defects in the depth map. The results show that although the autoencoder is trained with a very limited number of scans, the proposed approach can produce sufficient binary classification accuracy and specify the location of the defects.
Synthesizing Rolling Bearing Fault Samples in New Conditions: A framework based on a modified CGAN
Jun 29, 2022
Bearings are one of the vital components of rotating machines that are prone to unexpected faults. Therefore, bearing fault diagnosis and condition monitoring is essential for reducing operational costs and downtime in numerous industries. In various production conditions, bearings can be operated under a range of loads and speeds, which causes different vibration patterns associated with each fault type. Normal data is ample as systems usually work in desired conditions. On the other hand, fault data is rare, and in many conditions, there is no data recorded for the fault classes. Accessing fault data is crucial for developing data-driven fault diagnosis tools that can improve both the performance and safety of operations. To this end, a novel algorithm based on Conditional Generative Adversarial Networks (CGANs) is introduced. Trained on the normal and fault data on any actual fault conditions, this algorithm generates fault data from normal data of target conditions. The proposed method is validated on a real-world bearing dataset, and fault data are generated for different conditions. Several state-of-the-art classifiers and visualization models are implemented to evaluate the quality of the synthesized data. The results demonstrate the efficacy of the proposed algorithm.