 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGap and Overlap Detection in Automated Fiber Placement
Sep 01, 2023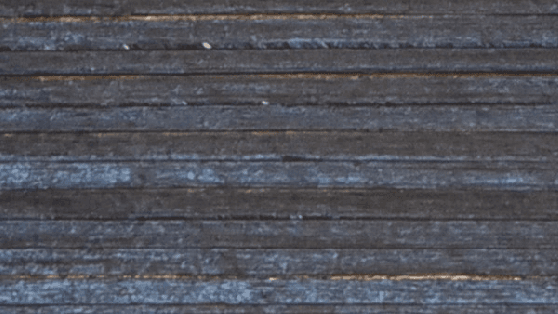
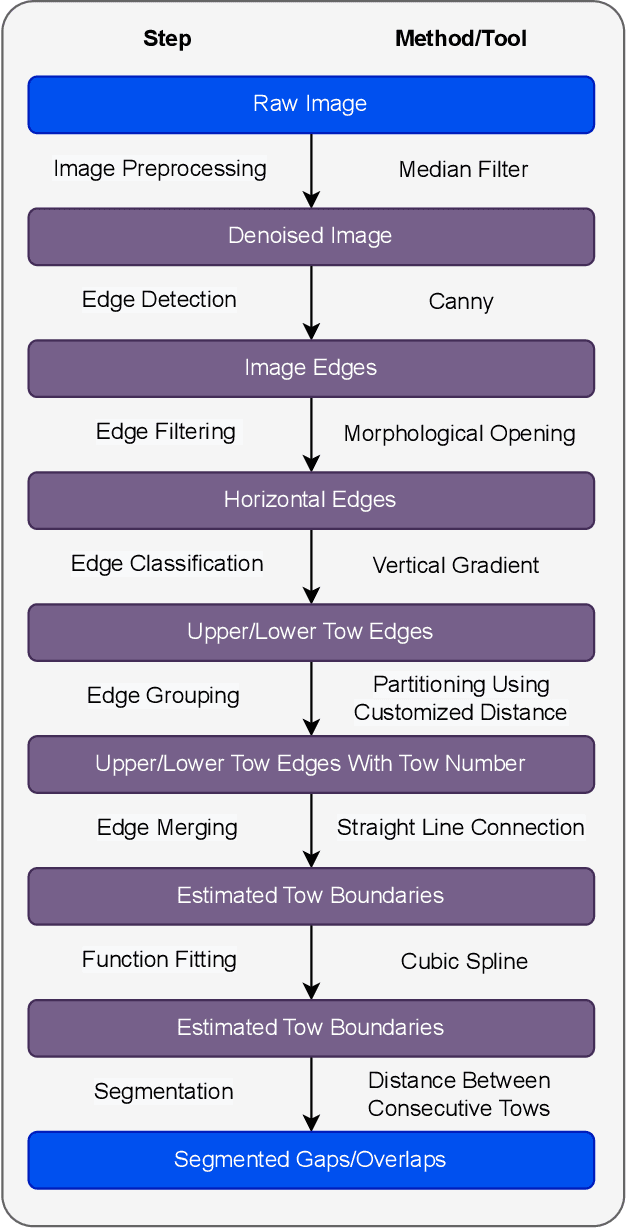
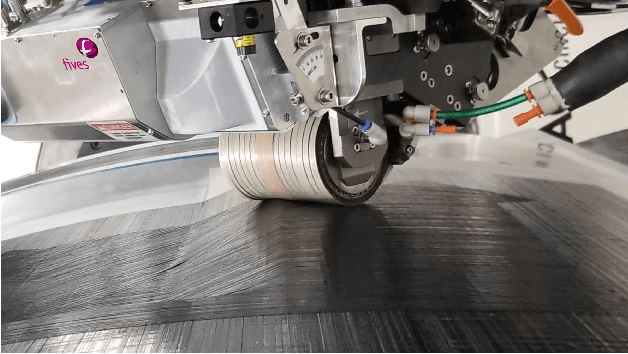
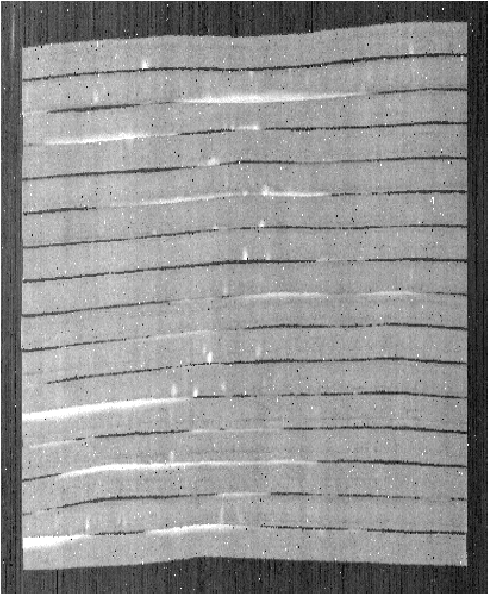
The identification and correction of manufacturing defects, particularly gaps and overlaps, are crucial for ensuring high-quality composite parts produced through Automated Fiber Placement (AFP). These imperfections are the most commonly observed issues that can significantly impact the overall quality of the composite parts. Manual inspection is both time-consuming and labor-intensive, making it an inefficient approach. To overcome this challenge, the implementation of an automated defect detection system serves as the optimal solution. In this paper, we introduce a novel method that uses an Optical Coherence Tomography (OCT) sensor and computer vision techniques to detect and locate gaps and overlaps in composite parts. Our approach involves generating a depth map image of the composite surface that highlights the elevation of composite tapes (or tows) on the surface. By detecting the boundaries of each tow, our algorithm can compare consecutive tows and identify gaps or overlaps that may exist between them. Any gaps or overlaps exceeding a predefined tolerance threshold are considered manufacturing defects. To evaluate the performance of our approach, we compare the detected defects with the ground truth annotated by experts. The results demonstrate a high level of accuracy and efficiency in gap and overlap segmentation.
Anomaly Detection in Automated Fibre Placement: Learning with Data Limitations
Jul 15, 2023



Current defect detection systems for Automated Fibre Placement (AFP) are mostly based on end-to-end supervised learning methods requiring abundant labelled defective samples, which are not easily generated in sufficient numbers. To address this data scarcity problem, we introduce an autoencoder-based approach compatible with small datasets. Fortunately, the problem from a foundational point of view can be simplified as a binary classification between normal and abnormal samples. The proposed approach uses a depth map of the fibre layup surface, split into small windows aligned to each composite strip (tow). A subset of these windows that do not contain anomalies is passed to an autoencoder to reconstruct the input. Because the autoencoder is trained with normal samples, it produces more accurate reconstructions for these samples than for abnormal ones. Therefore, the value of reconstruction error is used as a quantitative metric for whether there are potential anomalies. These values are combined to produce an anomaly map, which can localize the manufacturing defects in the depth map. The results show that although the autoencoder is trained with a very limited number of scans, the proposed approach can produce sufficient binary classification accuracy and specify the location of the defects.