 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusing Hand and Body Skeletons for Human Action Recognition in Assembly
Jul 18, 2023



As collaborative robots (cobots) continue to gain popularity in industrial manufacturing, effective human-robot collaboration becomes crucial. Cobots should be able to recognize human actions to assist with assembly tasks and act autonomously. To achieve this, skeleton-based approaches are often used due to their ability to generalize across various people and environments. Although body skeleton approaches are widely used for action recognition, they may not be accurate enough for assembly actions where the worker's fingers and hands play a significant role. To address this limitation, we propose a method in which less detailed body skeletons are combined with highly detailed hand skeletons. We investigate CNNs and transformers, the latter of which are particularly adept at extracting and combining important information from both skeleton types using attention. This paper demonstrates the effectiveness of our proposed approach in enhancing action recognition in assembly scenarios.
How Object Information Improves Skeleton-based Human Action Recognition in Assembly Tasks
Jun 09, 2023As the use of collaborative robots (cobots) in industrial manufacturing continues to grow, human action recognition for effective human-robot collaboration becomes increasingly important. This ability is crucial for cobots to act autonomously and assist in assembly tasks. Recently, skeleton-based approaches are often used as they tend to generalize better to different people and environments. However, when processing skeletons alone, information about the objects a human interacts with is lost. Therefore, we present a novel approach of integrating object information into skeleton-based action recognition. We enhance two state-of-the-art methods by treating object centers as further skeleton joints. Our experiments on the assembly dataset IKEA ASM show that our approach improves the performance of these state-of-the-art methods to a large extent when combining skeleton joints with objects predicted by a state-of-the-art instance segmentation model. Our research sheds light on the benefits of combining skeleton joints with object information for human action recognition in assembly tasks. We analyze the effect of the object detector on the combination for action classification and discuss the important factors that must be taken into account.
ATTACH Dataset: Annotated Two-Handed Assembly Actions for Human Action Understanding
Apr 17, 2023With the emergence of collaborative robots (cobots), human-robot collaboration in industrial manufacturing is coming into focus. For a cobot to act autonomously and as an assistant, it must understand human actions during assembly. To effectively train models for this task, a dataset containing suitable assembly actions in a realistic setting is crucial. For this purpose, we present the ATTACH dataset, which contains 51.6 hours of assembly with 95.2k annotated fine-grained actions monitored by three cameras, which represent potential viewpoints of a cobot. Since in an assembly context workers tend to perform different actions simultaneously with their two hands, we annotated the performed actions for each hand separately. Therefore, in the ATTACH dataset, more than 68% of annotations overlap with other annotations, which is many times more than in related datasets, typically featuring more simplistic assembly tasks. For better generalization with respect to the background of the working area, we did not only record color and depth images, but also used the Azure Kinect body tracking SDK for estimating 3D skeletons of the worker. To create a first baseline, we report the performance of state-of-the-art methods for action recognition as well as action detection on video and skeleton-sequence inputs. The dataset is available at https://www.tu-ilmenau.de/neurob/data-sets-code/attach-dataset .
A Little Bit Attention Is All You Need for Person Re-Identification
Feb 28, 2023Person re-identification plays a key role in applications where a mobile robot needs to track its users over a long period of time, even if they are partially unobserved for some time, in order to follow them or be available on demand. In this context, deep-learning based real-time feature extraction on a mobile robot is often performed on special-purpose devices whose computational resources are shared for multiple tasks. Therefore, the inference speed has to be taken into account. In contrast, person re-identification is often improved by architectural changes that come at the cost of significantly slowing down inference. Attention blocks are one such example. We will show that some well-performing attention blocks used in the state of the art are subject to inference costs that are far too high to justify their use for mobile robotic applications. As a consequence, we propose an attention block that only slightly affects the inference speed while keeping up with much deeper networks or more complex attention blocks in terms of re-identification accuracy. We perform extensive neural architecture search to derive rules at which locations this attention block should be integrated into the architecture in order to achieve the best trade-off between speed and accuracy. Finally, we confirm that the best performing configuration on a re-identification benchmark also performs well on an indoor robotic dataset.
Few-Shot Object Detection: A Survey
Dec 22, 2021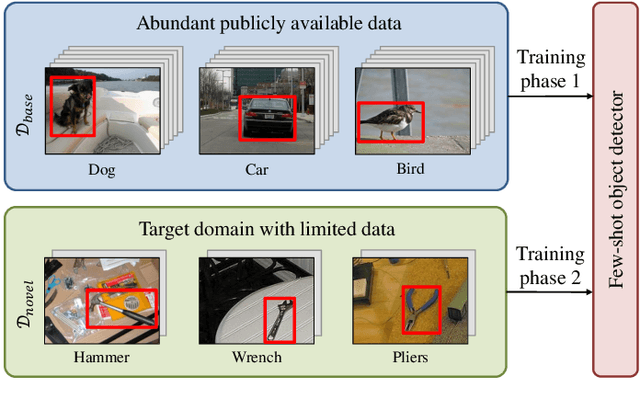
Humans are able to learn to recognize new objects even from a few examples. In contrast, training deep-learning-based object detectors requires huge amounts of annotated data. To avoid the need to acquire and annotate these huge amounts of data, few-shot object detection aims to learn from few object instances of new categories in the target domain. In this survey, we provide an overview of the state of the art in few-shot object detection. We categorize approaches according to their training scheme and architectural layout. For each type of approaches, we describe the general realization as well as concepts to improve the performance on novel categories. Whenever appropriate, we give short takeaways regarding these concepts in order to highlight the best ideas. Eventually, we introduce commonly used datasets and their evaluation protocols and analyze reported benchmark results. As a result, we emphasize common challenges in evaluation and identify the most promising current trends in this emerging field of few-shot object detection.
Integrating Deep Learning in Domain Sciences at Exascale
Nov 23, 2020
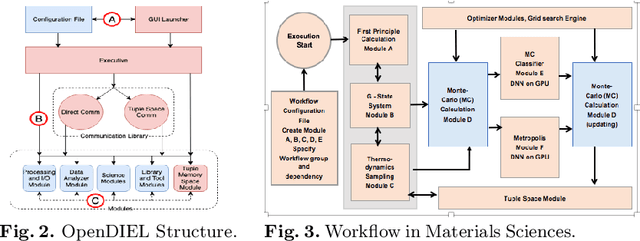
This paper presents some of the current challenges in designing deep learning artificial intelligence (AI) and integrating it with traditional high-performance computing (HPC) simulations. We evaluate existing packages for their ability to run deep learning models and applications on large-scale HPC systems efficiently, identify challenges, and propose new asynchronous parallelization and optimization techniques for current large-scale heterogeneous systems and upcoming exascale systems. These developments, along with existing HPC AI software capabilities, have been integrated into MagmaDNN, an open-source HPC deep learning framework. Many deep learning frameworks are targeted at data scientists and fall short in providing quality integration into existing HPC workflows. This paper discusses the necessities of an HPC deep learning framework and how those needs can be provided (e.g., as in MagmaDNN) through a deep integration with existing HPC libraries, such as MAGMA and its modular memory management, MPI, CuBLAS, CuDNN, MKL, and HIP. Advancements are also illustrated through the use of algorithmic enhancements in reduced- and mixed-precision, as well as asynchronous optimization methods. Finally, we present illustrations and potential solutions for enhancing traditional compute- and data-intensive applications at ORNL and UTK with AI. The approaches and future challenges are illustrated in materials science, imaging, and climate applications.
A greedy constructive algorithm for the optimization of neural network architectures
Sep 07, 2019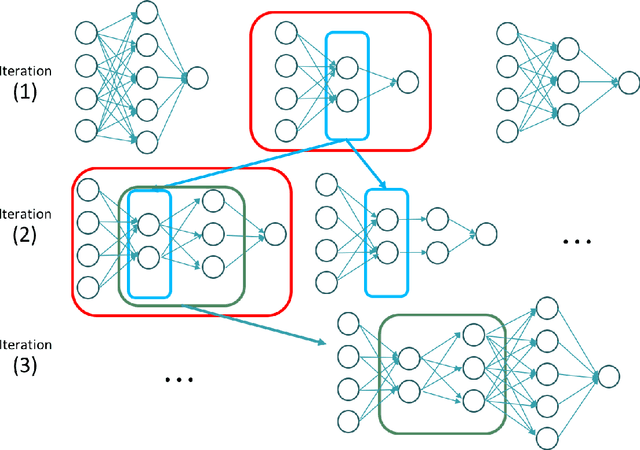

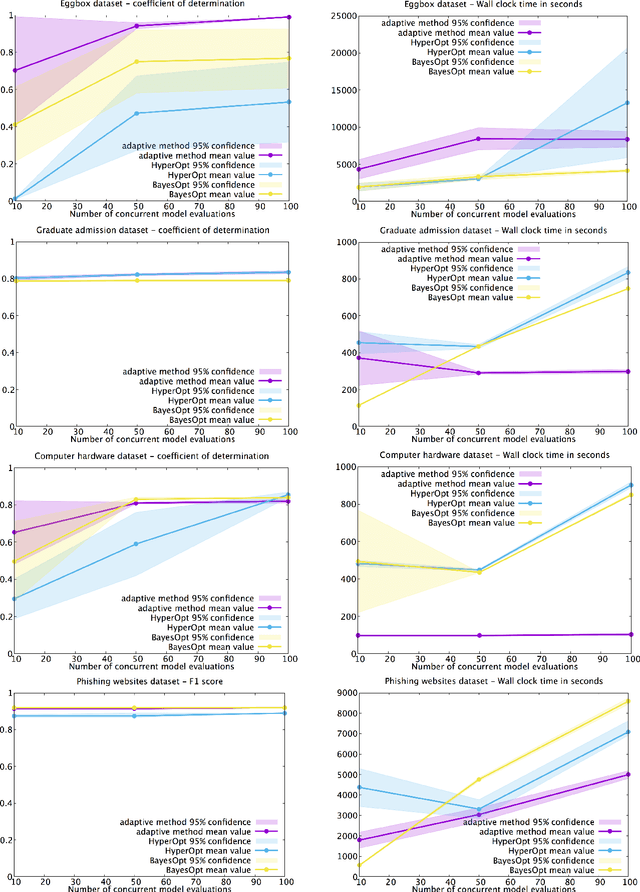
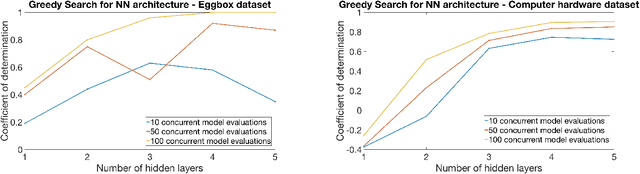
In this work we propose a new method to optimize the architecture of an artificial neural network. The algorithm proposed, called Greedy Search for Neural Network Architecture, aims to minimize the complexity of the architecture search and the complexity of the final model selected without compromising the predictive performance. The reduction of the computational cost makes this approach appealing for two reasons. Firstly, there is a need from domain scientists to easily interpret predictions returned by a deep learning model and this tends to be cumbersome when neural networks have complex structures. Secondly, the use of neural networks is challenging in situations with compute/memory limitations. Promising numerical results show that our method is competitive against other hyperparameter optimization algorithms for attainable performance and computational cost. We also generalize the definition of adjusted score from linear regression models to neural networks. Numerical experiments are presented to show that the adjusted score can boost the greedy search to favor smaller architectures over larger ones without compromising the predictive performance.
Robust data-driven approach for predicting the configurational energy of high entropy alloys
Aug 10, 2019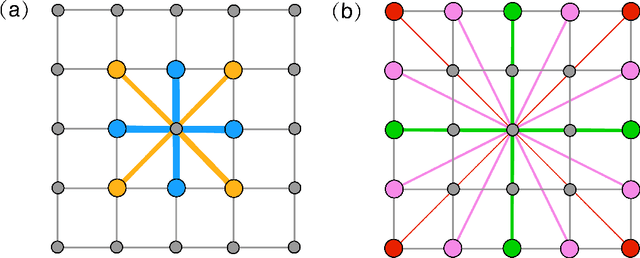

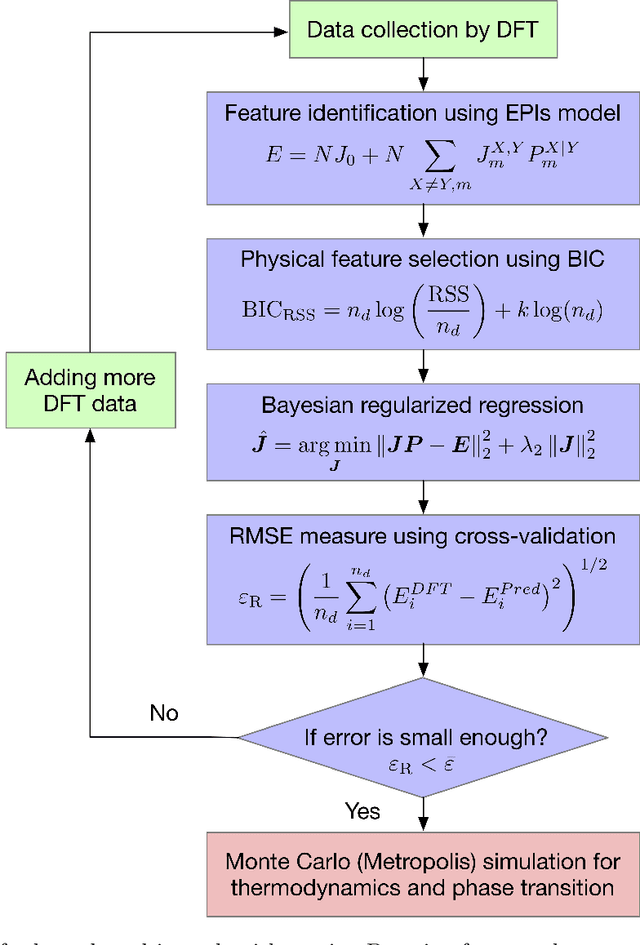
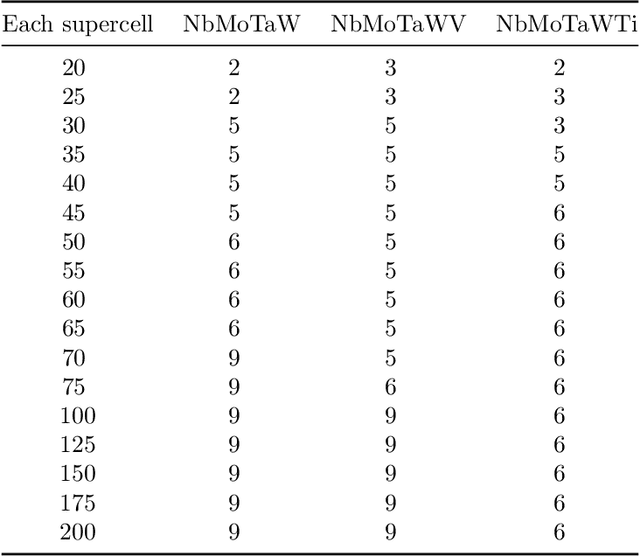
High entropy alloys (HEAs) have been increasingly attractive as promising next-generation materials due to their various excellent properties. It's necessary to essentially characterize the degree of chemical ordering and identify order-disorder transitions through efficient simulation and modeling of thermodynamics. In this study, a robust data-driven framework based on Bayesian approaches is proposed and demonstrated on the accurate and efficient prediction of configurational energy of high entropy alloys. The proposed effective pair interaction (EPI) model with ensemble sampling is used to map the configuration and its corresponding energy. Given limited data calculated by first-principles calculations, Bayesian regularized regression not only offers an accurate and stable prediction but also effectively quantifies the uncertainties associated with EPI parameters. Compared with the arbitrary determination of model complexity, we further conduct a physical feature selection to identify the truncation of coordination shells in EPI model using Bayesian information criterion. The results achieve efficient and robust performance in predicting the configurational energy, particularly given small data. The developed methodology is applied to study a series of refractory HEAs, i.e. NbMoTaW, NbMoTaWV and NbMoTaWTi where it is demonstrated how dataset size affects the confidence we can place in statistical estimates of configurational energy when data are sparse.